







机器学习的数学基础
作者:RichardsZ 公众号:智能驾驶软件宝典
本文简单整理了机器学习所涵盖的数学知识点,以结论的形式进行呈现,可作为便捷速查表,后续会继续进行完善!
前言
随着人工智能的不断发展,机器学习这门技术也越来越重要,很多人都开启了学习机器学习,本文就介绍了机器学习所需要的基本数学内容。
转载请注明出处,谢谢!
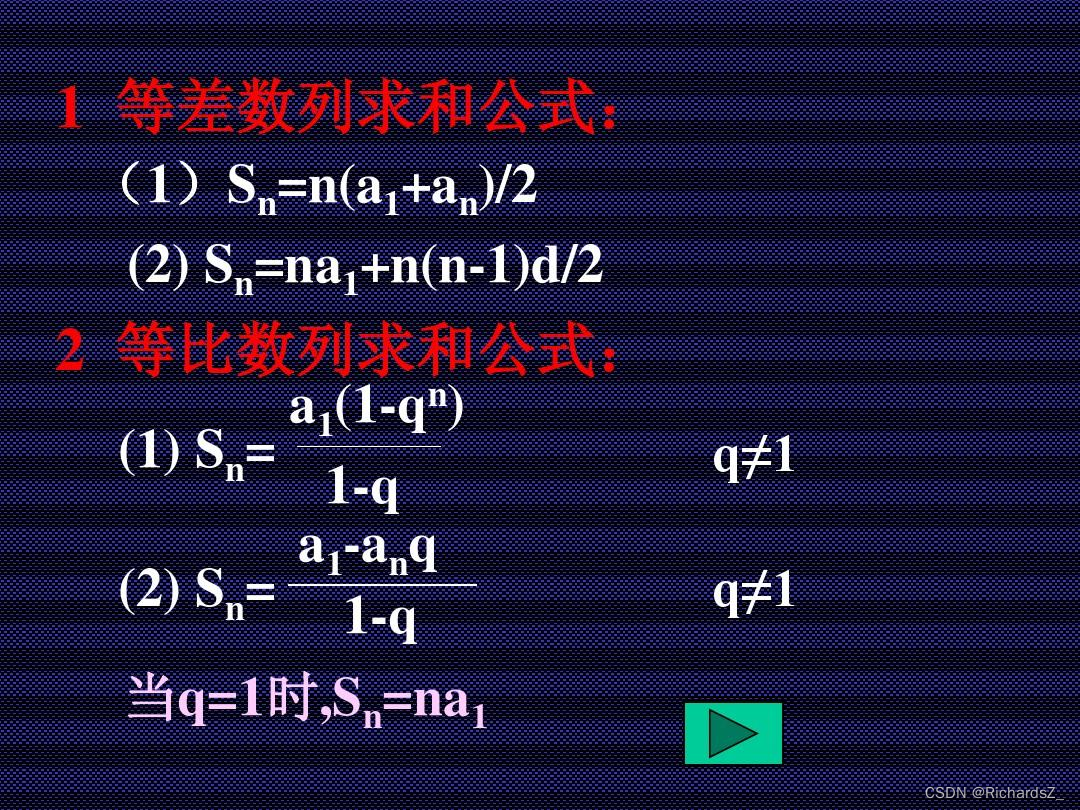
一、数列
一、矩阵
1. 矩阵的转置的转置仍为该矩阵,
(
A
T
)
T
=
A
(A^T)^T = A
(AT)T=A
2. 矩阵相加的转置等于矩阵分别转置之后再相加。
(
A
+
B
)
T
=
A
T
+
B
T
(A+B)^T=A^T+B^T
(A+B)T=AT+BT
3. 标量乘矩阵的转置等于矩阵先转置后乘标量。
(
λ
A
)
T
=
λ
A
T
(\lambda A)^ T = \lambda A^T
(λA)T=λAT
4. 两个矩阵相乘的转置等于第二个矩阵的转置左乘第一个矩阵的转置。
(
A
B
)
T
=
B
T
∗
A
T
(AB)^T=B^T*A^T
(AB)T=BT∗AT
5. 两个矩阵能够相乘的前提是,第一个矩阵的列数 = 第二个矩阵的行数,例如A为3x2的矩阵,B为2x4的矩阵,那么AxB为3x4的矩阵。
6. 单位矩阵,对角线上的元素为1,其它元素为0的矩阵。
7. 矩阵的逆,若AB=BA=E(E是单位矩阵),则称B是A的逆矩阵,而A则被称为可逆矩阵。
8. 如果一个行列式的两行(或两列)完全相同,那么这个行列式的值等于零 。
9.行列式计算常用方法:
| 计算方法 | |
|---|---|
| 化三角形法 |  |
| 提公因式法 | 可根据矩阵的一行/一列提取元素,计算剩余行列式,如图下所示  |
| 9.矩阵的特征值和特征向量 | |
| – | – |
| 特征值 λ \lambda λ | 计算行列式|
λ
E
−
A
\lambda E-A
λE−A|,得到特征值
λ
\lambda
λ |
| 特征向量 | 将求得的特征值
λ
\lambda
λ代入方程组
(
λ
E
−
A
)
x
=
0
(\lambda E-A)x = 0
(λE−A)x=0,求得x向量 |
二、向量
1. 具有大小和方向的量。
2. 在表示向量的时候,各维度通常纵向书写
[
1
4
]
\begin{bmatrix} 1\\ 4\end{bmatrix}
[14],表示向量具备两个维度x和y,在x方向前进了1个单位,y方向上前进了4个单位。若用坐标表示,可体现为两个坐标点,如(0,0)->(1,4),或(1,4)->(2,8)。
3. 向量的模 = 向量每个维度的平方开根号。如
x
⃗
\vec x
x=
[
1
4
]
\begin{bmatrix} 1\\ 4\end{bmatrix}
[14],则
∥
x
⃗
∥
=
1
2
+
4
2
\|\vec x\| = \sqrt {1^2+4^2}
∥x∥=12+42。
4. 零向量,模为0,方向任意。
5. 单位向量,模为1的向量,方向任意。
6. 向量标准化,向量的坐标分量除以向量的模长。
7. 向量的内积,为向量的模长的乘积再乘两个向量夹角的余弦值。若给出了坐标,向量内积等于对应分量乘积之和。
a
⃗
⋅
b
⃗
=
∥
a
⃗
∥
×
∥
b
⃗
∥
×
c
o
s
θ
\vec a \cdot \vec b=\|\vec a\|\times \|\vec b\|\times cos\theta
a⋅b=∥a∥×∥b∥×cosθ
8. 向量的叉乘

- 由向量的内积可推导出,柯西不等式, ∥ a ⃗ ⋅ b ⃗ ∥ < = ∥ a ⃗ ∥ × ∥ b ⃗ ∥ \|\vec a \cdot \vec b\|<=\|\vec a\|\times \|\vec b\| ∥a⋅b∥<=∥a∥×∥b∥
-
∥
x
⃗
+
y
⃗
∥
<
=
∥
x
⃗
∥
+
∥
y
⃗
∥
\|\vec x+ \vec y\| <= \|\vec x\|+\|\vec y\|
∥x+y∥<=∥x∥+∥y∥
10.向量的投影, 设两个非零向量 a ⃗ \vec a a与 b ⃗ \vec b b的夹角为θ,则将 ∥ b ⃗ ∥ ⋅ c o s θ \|\vec b\|·cosθ ∥b∥⋅cosθ叫做向量b在向量a方向上的投影或称标投影
三、L-P Norm(范数)
| 向量的范数 | |
|---|---|
| L-0 Norm(0-范数) | 向量中非0元素的数量 |
| L-1 Norm(1-范数) | 也称曼哈顿距离,即两点在南北方向上的距离加东西方向上的距离,即 ∣ x ∣ 1 = Σ i = 1 n ∣ x ∣ |x|_1 = \Sigma_{i=1}^n|x| ∣x∣1=Σi=1n∣x∣, 向量中的每个维度取绝对值进行加和 |
| L-2 Norm(2-范数) | 也称欧式距离, ∣ x ∣ 2 = Σ i = 1 n x i 2 |x|_2 = \sqrt{\Sigma_{i=1}^nx^2_i} ∣x∣2=Σi=1nxi2,向量中的每个维度取绝对值进行加和 |
| L-Infinity Norm(无穷范数) | 向量中元素的最大值 |
四、微积分
1. 泰勒公式
若函数
f
(
x
)
f(x)
f(x) 在包含
x
0
x_0
x0的某个闭区间[a,b]上具有n阶导数,且在开区间(a,b)上具有(n+1)阶导数,则对闭区间[a,b]上任意一点x,下式成立:
f
(
x
)
=
f
(
x
0
)
0
!
+
f
′
(
x
0
)
1
!
∗
(
x
−
x
0
)
+
f
′
′
(
x
0
)
2
!
∗
(
x
−
x
0
)
2
+
…
+
f
′
n
(
x
0
)
n
!
∗
(
x
−
x
0
)
n
+
R
n
(
x
)
f(x) =\frac {f(x_0)}{0!} +\frac {f'(x_0)} {1!} * (x-x_0) +\frac { f''(x_0)} { 2!} * (x-x_0)^2 + … +\frac { {f'^n}(x_0) }{ n!} * (x-x_0)^n + Rn(x)
f(x)=0!f(x0)+1!f′(x0)∗(x−x0)+2!f′′(x0)∗(x−x0)2+…+n!f′n(x0)∗(x−x0)n+Rn(x)
其中,
R
n
(
x
)
Rn(x)
Rn(x)为泰勒公式的余项,
P
n
(
x
)
Pn(x)
Pn(x),即除余项的部分为泰勒多项式。
2. 麦克劳林公式
当
x
0
=
0
x_0=0
x0=0时,此时的泰勒多项式又称作麦克劳林公式。
f
(
x
)
=
f
(
0
)
0
!
+
f
′
(
0
)
1
!
∗
(
x
)
+
f
′
′
(
0
)
2
!
∗
(
x
)
2
+
…
+
f
′
n
(
0
)
n
!
∗
(
x
)
n
+
R
n
(
x
)
f(x) =\frac {f(0)}{0!} +\frac {f'(0)} {1!} * (x) +\frac { f''(0)} { 2!} * (x)^2 + … +\frac { f'^n(0) }{ n!} * (x)^n + Rn(x)
f(x)=0!f(0)+1!f′(0)∗(x)+2!f′′(0)∗(x)2+…+n!f′n(0)∗(x)n+Rn(x)
例如
f
(
x
)
=
l
n
(
1
+
x
)
f(x)=ln(1+x)
f(x)=ln(1+x),
f
′
(
x
)
=
1
1
+
x
f'(x)=\frac {1}{1+x}
f′(x)=1+x1,
f
′
′
(
x
)
=
−
1
(
1
+
x
)
2
f''(x)=\frac {-1}{(1+x)^2}
f′′(x)=(1+x)2−1
将之代入麦克劳林公式:
l
n
(
1
+
x
)
=
0
+
x
−
x
2
2
!
+
.
.
.
+
(
−
1
)
n
−
1
x
n
n
+
R
n
(
x
)
ln(1+x) = 0+x-\frac {x^2}{2!}+...+\frac {(-1)^{n-1}x^n}{n}+ Rn(x)
ln(1+x)=0+x−2!x2+...+n(−1)n−1xn+Rn(x)
3. 函数的凹凸性
设函数f(x)在区间I上定义,若对I中的任意两点x1和x2,和任意λ∈(0,1),都有:
f
(
λ
x
1
+
(
1
−
λ
)
x
2
)
<
=
λ
f
(
x
1
)
+
(
1
−
λ
)
f
(
x
2
)
f(λx_1+(1-λ)x_2)<=λf(x_1)+(1-λ)f(x_2)
f(λx1+(1−λ)x2)<=λf(x1)+(1−λ)f(x2)
那么这个函数为下凸函数(convex),反之为下凹函数, 如下图所示。
同时,也可以利用函数的二阶导数进行分辨:
- 二阶导数>=0,随着自变量的增大,切线斜率越来越大,下凸函数;
- 二阶导数<=0,随着自变量的增大,切线斜率越来越小,下凹函数;

Softmax

总结
本文简单整理了机器学习所涵盖的数学知识点,以结论的形式进行呈现,可作为便捷速查表,后续会继续进行完善!
转载请注明出处,谢谢!















 722
722











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









