









转载请注明出处:http://blog.csdn.net/Righthek 谢谢!
对于一般的CAN模块,进行初始化时,最关键的是以下两步:
1、 配置CAN的位时序;
2、 配置CAN的消息报文;
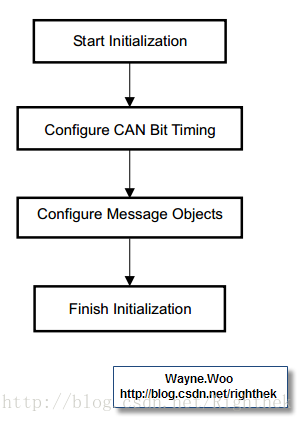
下面,我们来详细分析上面提到的关键两步。
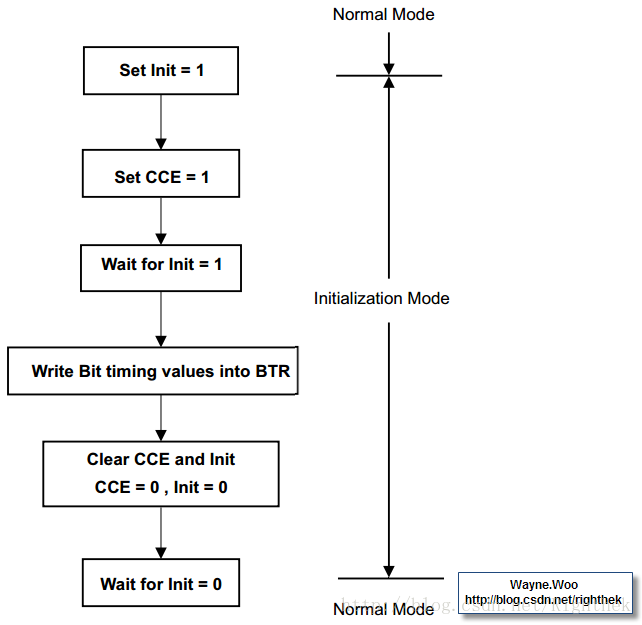
一、初始化步骤:
1、 第一步,进入初始化模式,在CAN控制寄存器中,将Init位置1;
2、 第二步,在CAN控制寄存器中,将CCE位置1;
3、 第三步,等待Init位置1,此步聚为了确保已经进入初始化模式;
4、 第四步,将位时序的值写入到位时序寄存器(BTR)中;
5、 第五步,将CCE和Init位置为0;
6、 第六步,等待清除Init位,此步聚为了确保已经退出初始化模式;
解释完CAN的初始化步骤后,我们来看看代码实现:
我们先初始化一个CAN的位时序常量。
/* CAN Bittiming constants as per D_CAN specs */
static structcan_bittiming_const d_can_bittiming_const = {
.name = D_CAN_DRV_NAME,
.tseg1_min = 1, /* Time segment 1 = prop_seg + phase_seg1 */
.tseg1_max = 16,
.tseg2_min = 1, /* Time segment 2 = phase_seg2 */
.tseg2_max = 8,
.sjw_max = 4,
.brp_min = 1,
.brp_max = 1024, /* 6-bit BRP field + 4-bit BRPE field*/
.brp_inc = 1,
};
在打开CAN设置时,进行初始化。初始化完成之后,恢复正常模式,使能收发I/O控制引脚,最后配置消息报文。代码如下:
static void d_can_init(structnet_device *dev)
{
struct d_can_priv *priv =netdev_priv(dev);
u32 cnt;
netdev_dbg(dev, "resetting d_can...\n");
d_can_set_bit(priv, D_CAN_CTL,D_CAN_CTL_SWR);
/* Enterinitialization mode by setting the Init bit */
d_can_set_bit(priv, D_CAN_CTL,D_CAN_CTL_INIT);
/* enableautomatic retransmission */
d_can_set_bit(priv, D_CAN_CTL,D_CAN_CTL_ENABLE_AR);
/* Set theConfigure Change Enable ( CCE) bit */
d_can_set_bit(priv, D_CAN_CTL,D_CAN_CTL_CCE);
/* Wait forthe Init bit to get set */
cnt = D_CAN_WAIT_COUNT;
while (!d_can_get_bit(priv, D_CAN_CTL,D_CAN_CTL_INIT) && cnt != 0) {
--cnt;
udelay(10);
}
/* setbittiming params */
d_can_set_bittiming(dev);
d_can_clear_bit(priv, D_CAN_CTL,D_CAN_CTL_INIT | D_CAN_CTL_CCE);
/* Wait for the Init bit to get clear*/
cnt = D_CAN_WAIT_COUNT;
while (d_can_get_bit(priv, D_CAN_CTL,D_CAN_CTL_INIT) && cnt != 0) {
--cnt;
udelay(10);
}
if (priv->can.ctrlmode &(CAN_CTRLMODE_LOOPBACK |
CAN_CTRLMODE_LISTENONLY))
d_can_test_mode(dev);
else
/* normal mode*/
d_can_write(priv, D_CAN_CTL,D_CAN_CTL_EIE | D_CAN_CTL_IE1 |
D_CAN_CTL_IE0);
/* Enable TXand RX I/O Control pins */
d_can_write(priv, D_CAN_TIOC,D_CAN_TIOC_FUNC);
d_can_write(priv, D_CAN_RIOC, D_CAN_RIOC_FUNC);
/* configuremessage objects */
d_can_configure_msg_objects(dev);
/* set a LECvalue so that we can check for updates later */
d_can_write(priv, D_CAN_ES,LEC_UNUSED);
}
执行完第一、第二步之后,设置位时序的参数,代码如下:
static intd_can_set_bittiming(struct net_device *dev)
{
struct d_can_priv *priv =netdev_priv(dev);
const struct can_bittiming *bt =&priv->can.bittiming;
u32 can_btc;
can_btc = ((bt->phase_seg2 - 1)& 0x7) << D_CAN_BTR_TSEG2_SHIFT;
can_btc |= ((bt->phase_seg1 +bt->prop_seg - 1)
& 0xF) <<D_CAN_BTR_TSEG1_SHIFT;
can_btc |= ((bt->sjw - 1) & 0x3)<< D_CAN_BTR_SJW_SHIFT;
/* Ten bitscontains the BRP, 6 bits for BRP and upper 4 bits for brpe*/
can_btc |= ((bt->brp - 1) &0x3F) << D_CAN_BTR_BRP_SHIFT;
can_btc |= ((((bt->brp - 1) >>6) & 0xF) << D_CAN_BTR_BRPE_SHIFT);
d_can_write(priv, D_CAN_BTR, can_btc);
netdev_info(dev, "setting CAN BT =%#x\n", can_btc);
return 0;
}
以上内容并不是Linux CAN的驱动初始化过程,只是属于其中的一部分。更具体地说,是针对CAN控制器的初始化过程。
转载请注明出处: http://blog.csdn.net/Righthek 谢谢!















 2175
2175











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









