






Comsol偏振不依赖BIC超表面。
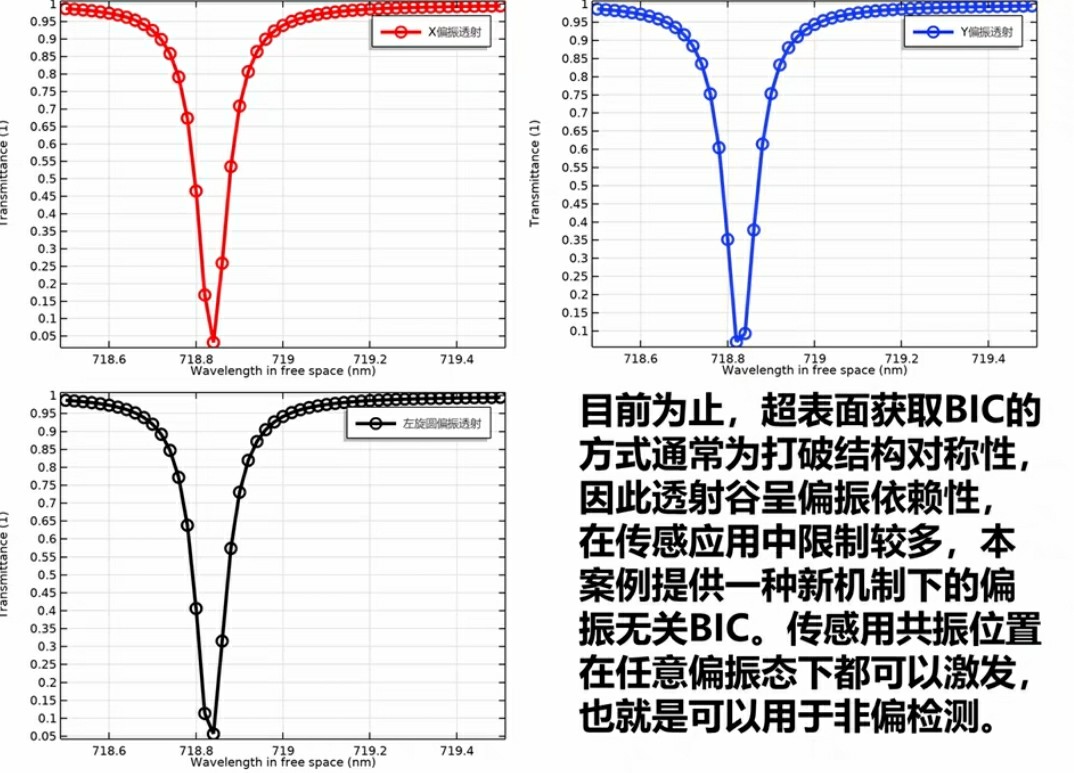
目前为止,超表面获取BIC的方式通常为打破结构对称性,因此呈偏振依赖性,本案例提供一种新机制下的偏振无关BIC。
机制较新,可以进行快速跟进,因此不便展示具体结构
ID:38228815901401885
爱学习的番茄
基于V-REP与MATLAB联合仿真的小车项目详解
一、引言
随着科技的飞速发展,机器人技术已成为当今研究的热点领域。其中,自主移动机器人的研究和开发更是备受关注。V-REP(Virtual Robot Experimentation Platform)作为一款强大的机器人仿真软件,广泛应用于机器人研究和教育。本文将介绍一个基于V-REP与MATLAB联合仿真的小车项目,该项目涵盖了循迹、避障、走迷宫和路径规划等功能。本文将详细阐述该项目的实施过程,并配以相应的文档说明,以供参考和交流。
二、V-REP小车项目的概述
在本项目中,我们将构建一个模拟的自主小车模型,并利用V-REP进行仿真。该小车具备多种功能,包括循迹、避障、走迷宫和路径规划等。V-REP作为仿真平台,为我们提供了一个高度逼真的环境来测试和优化小车的行为。而MATLAB则作为数据处理和算法开发的强大工具,用于实现小车的各项功能。
三、基于V-REP与MATLAB的联合仿真
- 环境搭建
首先,我们需要安装V-REP和MATLAB软件,并建立两者之间的通信。V-REP提供了与MATLAB的接口,方便数据的传输和命令的发送。
- 小车模型建立
在V-REP中,我们需要创建小车的模型,包括车轮、传感器等部分。这些模型将用于模拟小车的运动和行为。
- 仿真场景设计
在V-REP中设计仿真场景,包括道路、障碍物、迷宫等。这些场景将用于测试小车的各项功能。
- 算法开发与调试
在MATLAB中开发小车的控制算法,包括路径规划、避障策略等。通过调试算法,确保其在仿真环境中的有效性。
四、小车功能实现详解
- 循迹功能
通过传感器识别道路标识,使小车能够沿着预定的路径行驶。这一功能的实现需要借助图像处理和机器学习等技术。
- 避障功能
通过传感器检测环境中的障碍物,并实时调整小车的行驶路径,以避免碰撞。这一功能的实现需要借助传感器技术和控制算法。
- 走迷宫功能
在迷宫环境中,通过路径规划和决策算法,使小车能够找到从起点到终点的路径。这一功能的实现需要借助图论和人工智能等技术。
- 路径规划功能
根据小车的目标点和当前位置,规划出最优的路径。这一功能的实现需要借助路径规划算法,如Dijkstra算法或A*算法等。
五、文档说明与配套资源
为了更方便读者理解和实现本项目,我们将提供详细的文档说明和配套资源。文档将包括:
- 项目介绍:介绍项目的背景、目的和意义。
- 环境搭建指南:指导读者如何安装和配置V-REP和MATLAB软件。
- 小车模型建立教程:详细讲解如何在V-REP中创建小车模型。
- 仿真场景设计教程:介绍如何设计仿真场景以测试小车的各项功能。
- 算法开发与调试指南:指导读者如何在MATLAB中开发小车的控制算法,并调试其在仿真环境中的表现。
- 功能实现详解:详细阐述循迹、避障、走迷宫和路径规划等功能的实现原理和方法。
- 常见问题解答:汇总项目中常见的问题及解决方案,帮助读者顺利推进项目。
六、总结与展望
通过本项目,我们详细介绍了基于V-REP与MATLAB联合仿真的小车项目的实施过程。该项目涵盖了循迹、避障、走迷宫和路径规划等功能,具有很高的实用性和研究价值。我们相信,通过本项目的学习和实践,读者将对自主移动机器人的研究和开发有更深入的了解和掌握。未来,随着技术的不断发展,自主移动机器人将在更多领域得到应用,我们将继续探索和研究,为机器人技术的发展做出贡献。
相关的代码,程序地址如下:http://matup.cn/815901401885.html
















 1015
1015

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









