



LADRC simulink仿真。
(含)
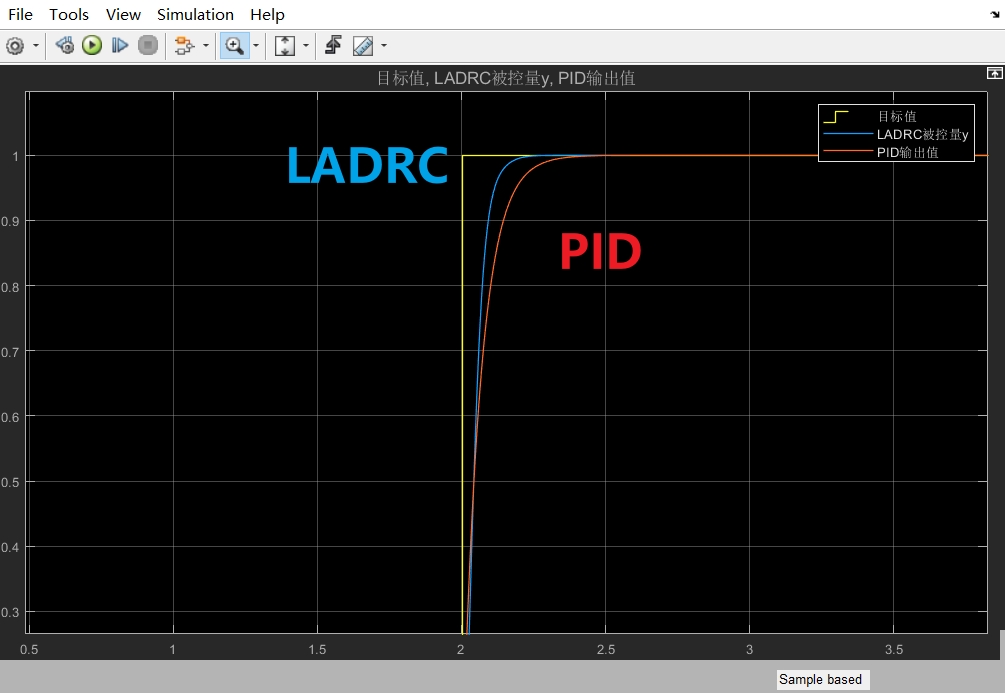
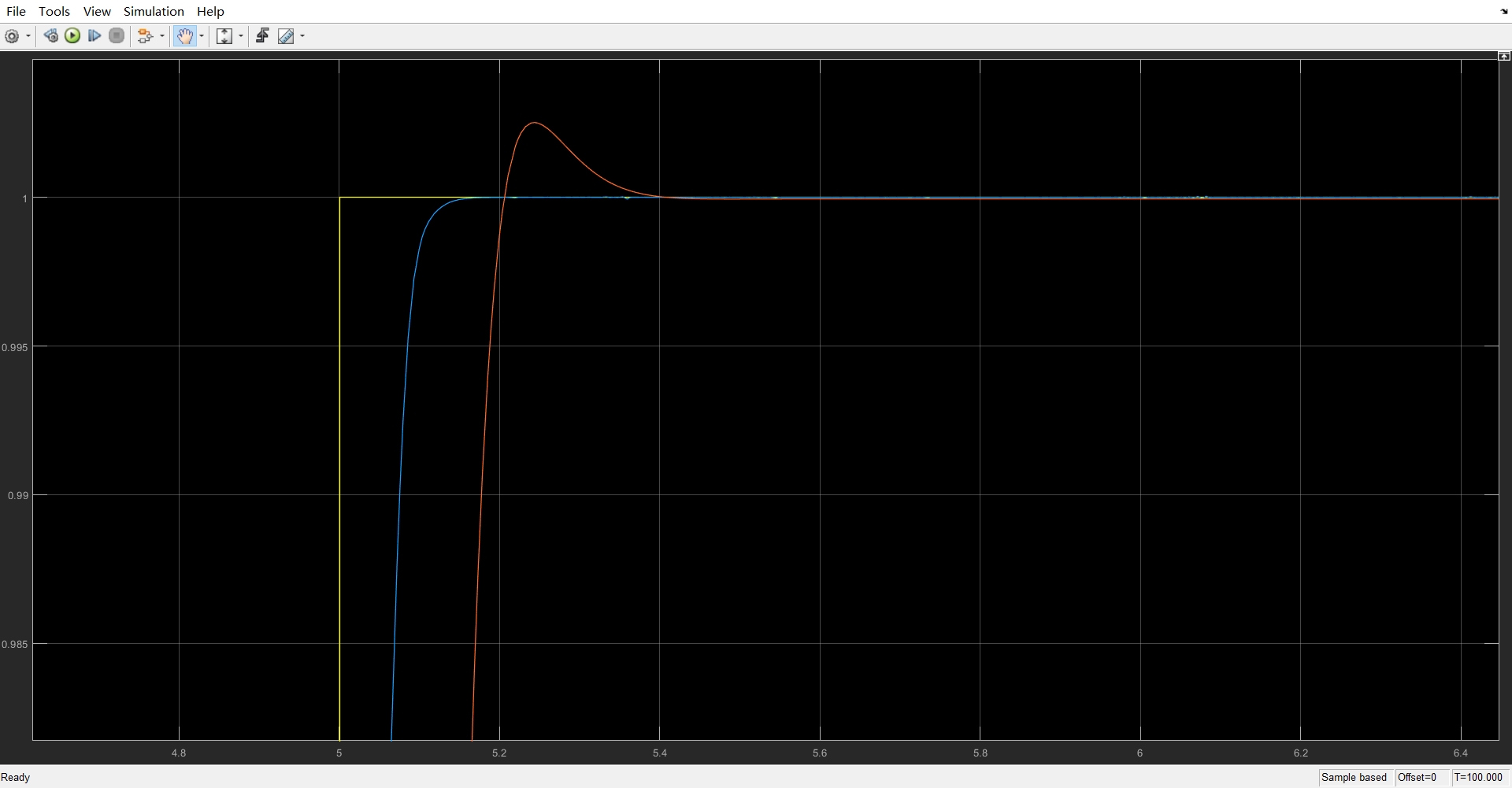
与pid效果对比。
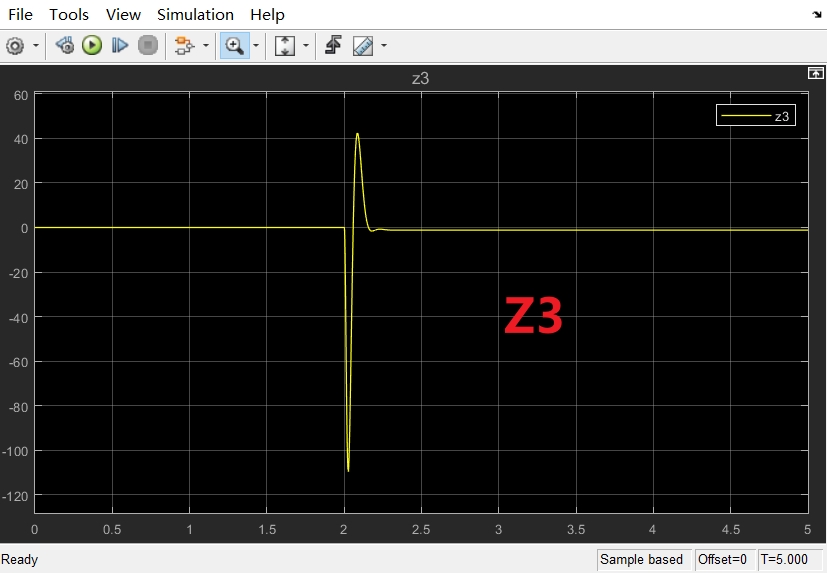
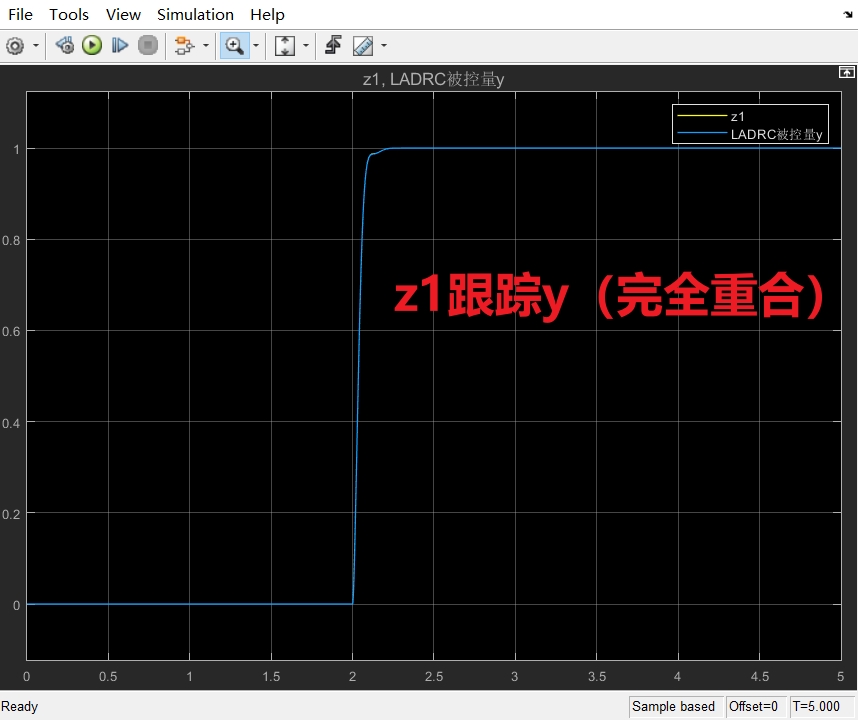
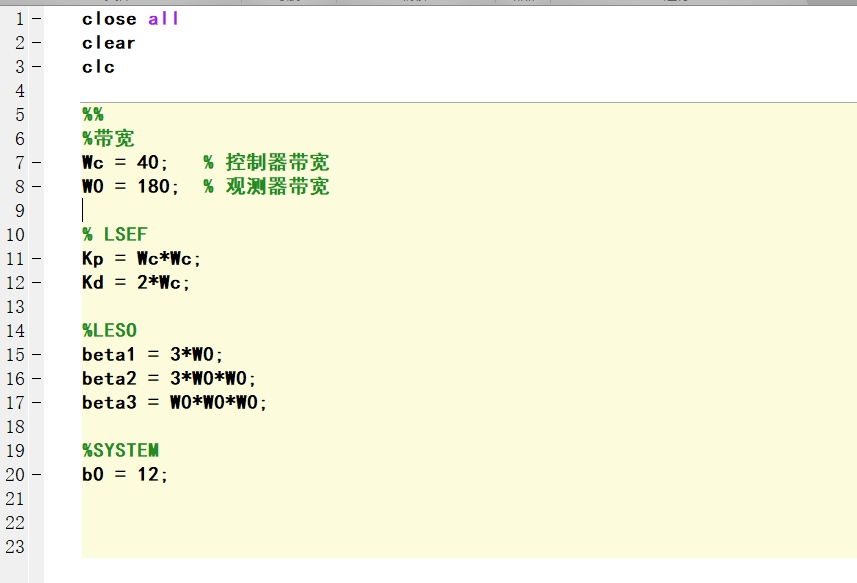
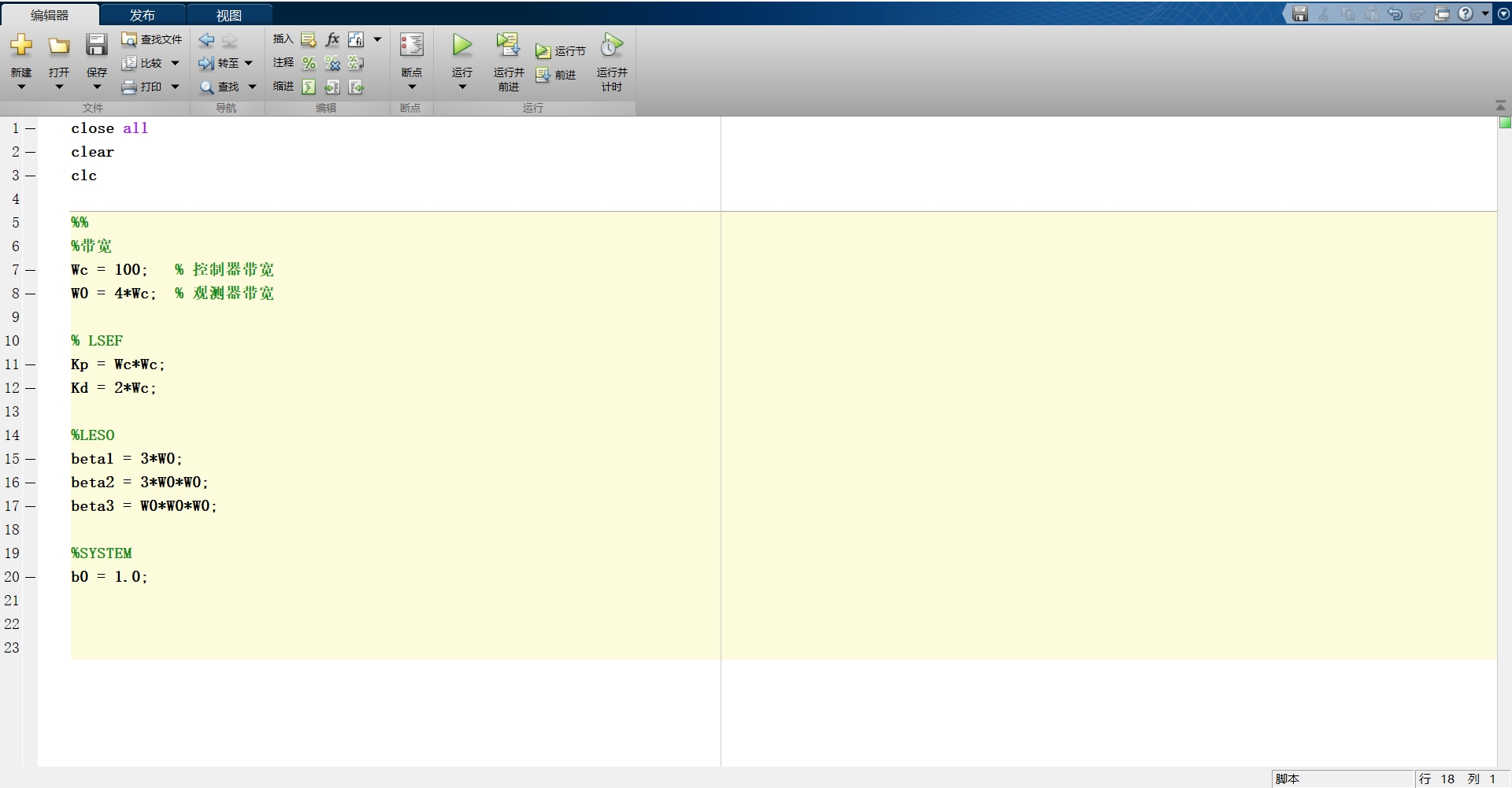
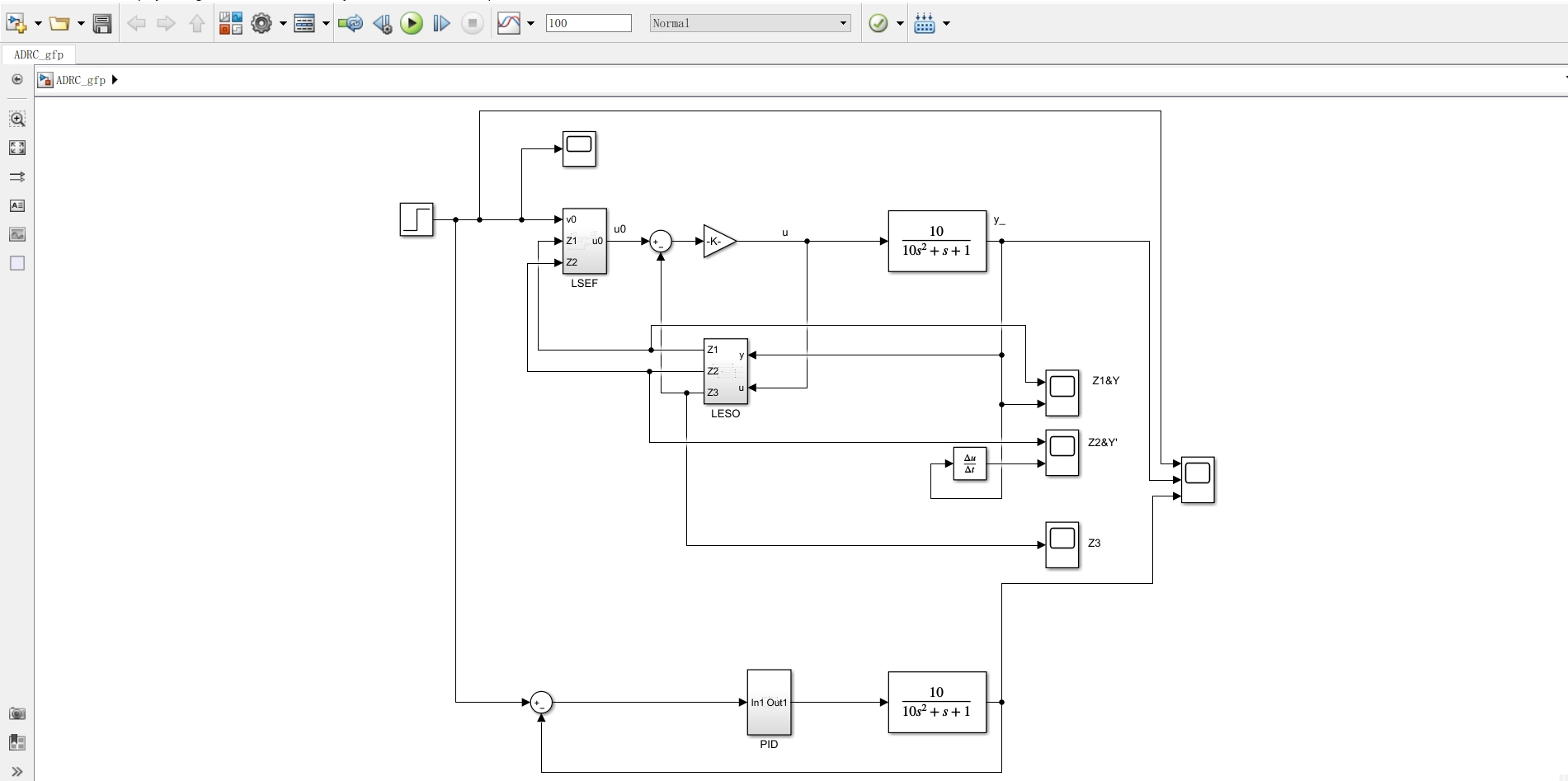
含LSEF、LESO(未使用TD安排过渡过程)
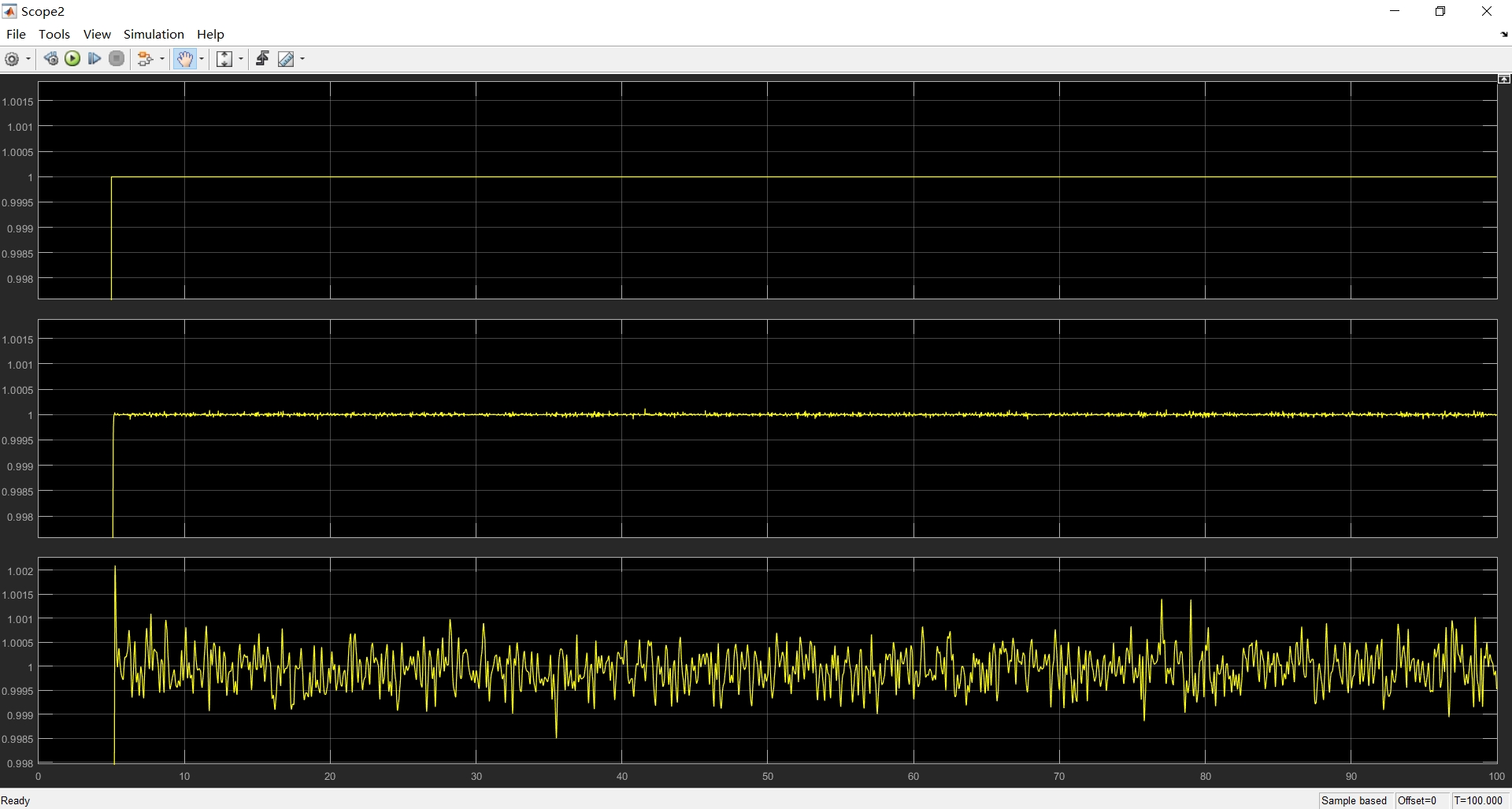
引入噪声扰动效果与PID对比。
也包含未引入噪声的。
被控对象是典型传函。
框架简单易懂,适合入门学习ladrc。
ID:6314672434857220
天下行走

LADRC (Linear Active Disturbance Rejection Control)是一种新兴的控制方法,可以用于实现对系统中各种干扰的主动抵消,从而提高系统的控制性能。在本文中,我们将主要介绍LADRC在Simulink仿真中的应用,并与传统的PID控制方法进行对比。
首先,我们将介绍LADRC的基本原理和框架。LADRC的核心思想是通过引入一个补偿器,来预测和抵消系统中的各种干扰。该补偿器基于系统模型和对干扰的估计,可以实时地计算出系统的控制指令。与传统的PID控制方法相比,LADRC具有更好的鲁棒性和抗干扰性能。
在Simulink中,我们可以通过建立LADRC的仿真模型来验证其在实际系统中的效果。我们可以使用自带的LADRC模块,将其与PID控制器进行对比。通过对比实验,我们可以发现LADRC在抑制干扰方面具有明显的优势。特别是在面对非线性和时变的干扰时,LADRC能够更好地保持系统的稳定性和性能。
此外,我们还可以对LADRC进行不同参数的调节,以进一步提高系统的控制性能。例如,我们可以调节LADRC的增益参数和滤波器参数,来适应不同的系统和干扰特性。通过仿真实验,我们可以得到不同参数设置下的系统响应曲线,并进行对比分析。
除了引入噪声扰动的仿真实验外,我们还可以进行未引入噪声的实验,以评估LADRC在理想条件下的表现。通过与PID控制方法的对比,我们可以更清楚地看到LADRC的优势所在。
最后,我们需要注意的是,LADRC适用于许多不同的控制对象。在本文中,我们选择了典型的传函对象作为案例进行研究。通过对该对象的控制实验,我们可以验证LADRC在实际系统中的适用性。同时,我们的框架设计也非常简单易懂,适合初学者入门学习LADRC控制方法。
总的来说,本文主要介绍了LADRC在Simulink仿真中的应用,并与PID控制方法进行了对比分析。通过引入噪声扰动和未引入噪声的实验,我们验证了LADRC在抑制干扰方面的优势。同时,我们还提出了对LADRC参数进行调节的方法,以进一步提高系统的控制性能。通过这些仿真实验,读者可以更好地理解和掌握LADRC控制方法的原理和应用。希望本文能对广大程序员和控制工程师们有所启发,并促进LADRC在实际工程中的应用。
以上相关代码,程序地址:http://wekup.cn/672434857220.html

















 1602
1602

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









