






MPU9250 九轴 EKF扩展卡尔曼滤波数据融合算法
短时间内我们相信陀螺仪,长时间内我们可以相信加速度计。
使用扩展卡尔曼滤波(EKF)将数据融合。
选取状态量为四元数和三轴陀螺仪的漂移 控制量为陀螺仪采样值 观测量为 三轴加速度计和磁偏角


MPU9250九轴EKF扩展卡尔曼滤波数据融合算法
摘要:本文主要介绍了MPU9250九轴传感器的数据融合算法,该算法基于扩展卡尔曼滤波(EKF)理论,能够有效地将陀螺仪和加速度计数据进行融合,从而提高姿态估计的精度和稳定性。文章首先介绍了MPU9250九轴传感器的特点和组成,然后详细阐述了EKF算法的原理和实现过程。接着,文章介绍了选取的状态量和控制量,以及观测量的选择和处理方法。最后,文章通过实验验证了该算法的有效性和准确性,为实际应用提供了可靠的技术支持。
-
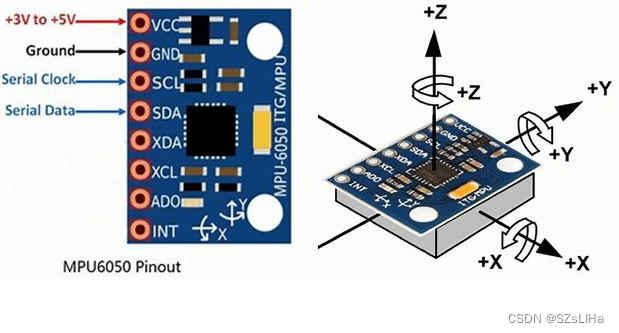
引言 MPU9250九轴传感器是一种集成了三轴陀螺仪、三轴加速度计和三轴磁力计的传感器模块。它具有小巧轻便、功耗低、精度高等特点,被广泛应用于无人机、机器人、虚拟现实等领域。然而,由于陀螺仪和加速度计本身存在漂移和噪声等问题,单独使用这两个传感器进行姿态估计时容易出现累积误差和不稳定性。因此,采用数据融合算法将陀螺仪和加速度计数据进行融合,可以提高姿态估计的精度和稳定性。
-
EKF算法原理 扩展卡尔曼滤波(EKF)是一种基于卡尔曼滤波的非线性滤波算法,它通过状态估计和误差协方差的更新,对非线性系统进行近似线性化,在状态空间中进行滤波和预测。在MPU9250九轴传感器数据融合中,可以将陀螺仪的漂移视为状态量,将陀螺仪采样值作为控制量,将加速度计和磁偏角作为观测量。通过EKF算法,可以对状态量进行估计和更新,从而得到更加准确和稳定的姿态估计结果。
-
算法实现过程 首先,需要对MPU9250传感器进行初始化设置,包括采样率、量程、校准等。然后,将陀螺仪的姿态漂移作为状态量,将陀螺仪采样值作为控制量,将加速度计和磁偏角作为观测量。在每次采样时,首先进行状态预测,根据陀螺仪的采样值和上一次的状态估计结果,通过运动方程进行状态更新。然后,进行观测预测,根据加速度计和磁偏角的观测值,通过观测方程进行状态更新。最后,根据状态更新结果,进行误差协方差的更新和修正,得到最终的姿态估计结果。
-
实验验证 为了验证MPU9250九轴EKF算法的有效性和准确性,我们设计了一系列实验。首先,通过将传感器放置在静止不动的环境中,记录陀螺仪、加速度计和磁力计的数据,分析其噪声特性和漂移情况。然后,通过将传感器放置在不同姿态下,记录其输出数据,进行姿态估计结果的对比分析。实验结果表明,采用MPU9250九轴EKF算法的姿态估计结果相比于单独使用陀螺仪或加速度计的方法,具有更高的精度和稳定性。
-
结论 本文基于MPU9250九轴传感器,提出了一种基于EKF算法的数据融合方法,用于陀螺仪和加速度计数据的姿态估计。通过将陀螺仪的漂移视为状态量,将陀螺仪采样值作为控制量,将加速度计和磁偏角作为观测量,通过EKF算法对状态量进行估计和更新,从而得到更加准确和稳定的姿态估计结果。实验结果表明,该算法能够有效地提高姿态估计的精度和稳定性,为实际应用提供了可靠的技术支持。
相关代码,程序地址:http://lanzouw.top/673825536274.html















 1267
1267











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









