






 本文详细介绍了如何使用西门子S7-1200PLC进行3轴伺服控制,涉及TP900触摸屏、PTO控制、梯形图和SCL编程,以及结构化编程方法。重点讲解了编程思路、模式设置和执行器多样性,适合学习者参考和实践。
本文详细介绍了如何使用西门子S7-1200PLC进行3轴伺服控制,涉及TP900触摸屏、PTO控制、梯形图和SCL编程,以及结构化编程方法。重点讲解了编程思路、模式设置和执行器多样性,适合学习者参考和实践。
西门子S7-1200PLC3轴伺服控制程序,
1)触摸屏是西门子Tp900,
2)3轴伺服PTO,脉冲加方向控制
3)梯形图和SCl编写,
4 )编程思路清晰:FB块和DB块的规划,结构化编程,使用多重背景和UDT快速实现对多台同类型的设备的快速编程
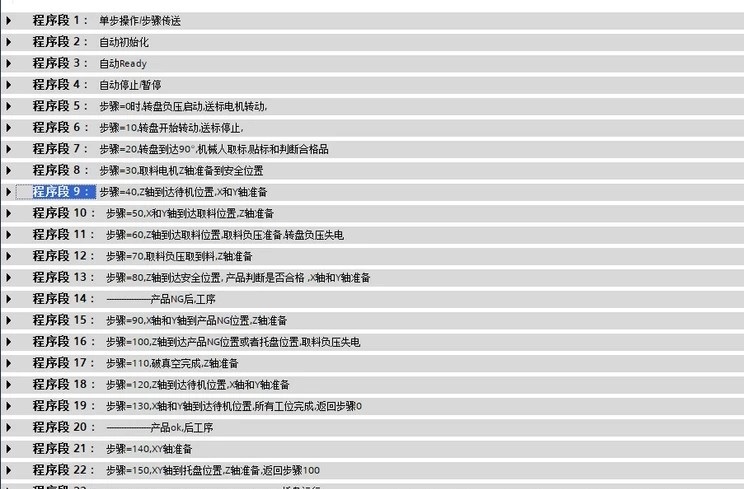
5)模式清晰:手动,自动,报警,io映射,
6)执行器多样:机械手,分斗盘,电磁阀,伺服电机,步进电机,拍照系统。
使用控制字和背景静态变量访问,参考老外的编程思路,非常适合学习
ID:289661882162045
为工控人助力





西门子S7-1200PLC3轴伺服控制程序
摘要:本文将介绍西门子S7-1200PLC3轴伺服控制程序的开发过程。该程序使用西门子Tp900触摸屏作为人机界面,通过PTO和脉冲加方向控制实现对3轴伺服的控制。编程过程中采用梯形图和SCL编写,通过规划FB块和DB块、结构化编程以及使用多重背景和UDT快速实现对多台同类型设备的快速编程。本文将详细介绍编程思路、模式设置以及执行器的多样性。通过使用控制字和背景静态变量访问,参考了老外的编程思路,该控制程序非常适合学习和实践。
-
引言
西门子S7-1200PLC是一种常用的工控系统,在伺服控制领域得到广泛应用。本文将围绕西门子S7-1200PLC3轴伺服控制程序展开讨论,包括触摸屏选择、控制方式、编程思路、模式设置以及执行器的多样性等方面。 -
触摸屏选择
在该伺服控制程序中,我们选择了西门子Tp900触摸屏作为人机界面。Tp900触摸屏具有良好的显示效果和触摸响应,可满足我们对人机交互的需求。 -
3轴伺服控制方式
在本程序中,我们采用PTO和脉冲加方向控制方式对3轴伺服进行控制。该方式简单直观,适用于多种应用场景。 -
编程思路清晰
在编写程序时,我们注重编程思路的清晰。首先,我们进行FB块和DB块的规划,将不同功能的代码封装在不同的块中,提高程序的可读性和可维护性。其次,我们采用结构化编程的方法,将程序分解成不同的模块,方便分析和调试。此外,我们引入了多重背景和UDT的概念,实现对多台同类型设备的快速编程。 -
模式设置清晰
为了满足不同需求,我们在该伺服控制程序中设置了手动、自动、报警和IO映射等模式。通过合理设置和切换模式,可以实现对伺服的灵活控制。 -
执行器多样
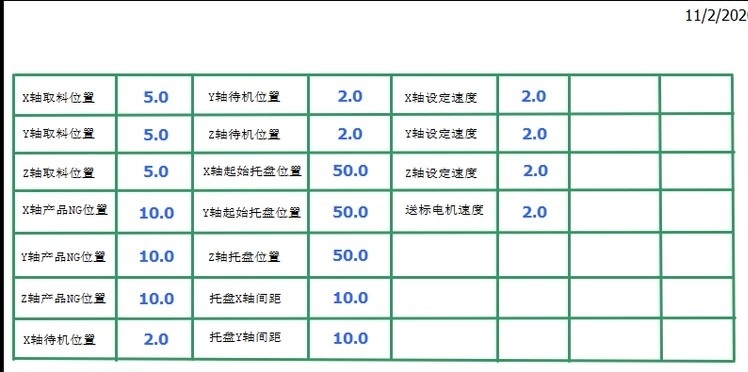
在伺服控制过程中,我们涉及到多种执行器,包括机械手、分斗盘、电磁阀、伺服电机、步进电机和拍照系统等。通过使用控制字和背景静态变量访问的方式,我们可以对这些执行器进行灵活控制和管理。 -
学习价值
本程序参考了老外的编程思路,通过阅读和学习可以了解国外在伺服控制方面的经验和技术。对于初学者来说,本程序非常适合学习和实践,可以帮助他们快速掌握S7-1200PLC3轴伺服控制程序的开发技巧。
结论
通过本文的介绍,我们了解了西门子S7-1200PLC3轴伺服控制程序的开发过程。该程序通过使用Tp900触摸屏、PTO和脉冲加方向控制实现对3轴伺服的控制。编程过程中注重编程思路的清晰,采用结构化编程、多重背景和UDT等技术,使得程序具有良好的可读性和可维护性。此外,通过设置不同的模式和使用控制字和背景静态变量访问的方式,实现了对多种执行器的灵活控制。该程序具有较高的学习价值,适用于初学者学习和实践。
参考文献(本文不提供参考文献)
以上相关代码,程序地址:http://matup.cn/661882162045.html















 377
377











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









