






基于EKF(拓展卡尔曼滤波器)与里程计算法的机器人定位的MATLAB程序
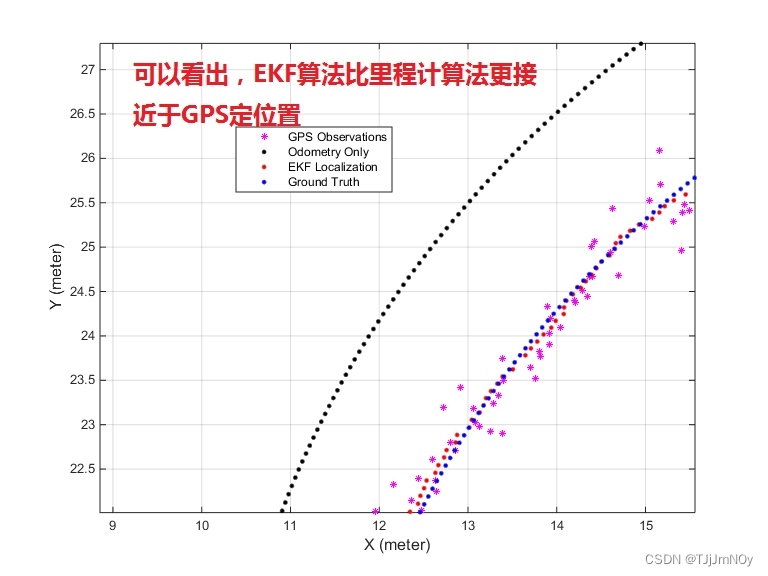
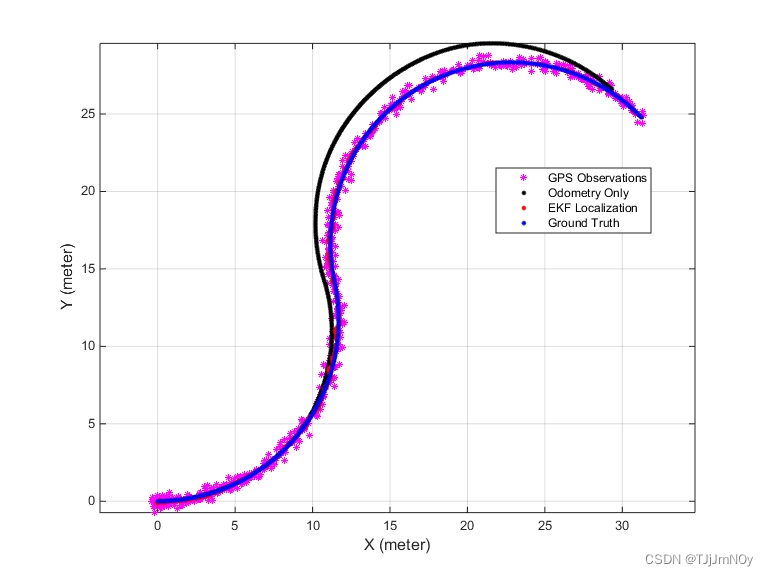
使用EKF模型与里程计模型(Odometry)对机器人进行定位,定位的结果跟GPS定位的真实值作比较,验证两种算法的可行性。
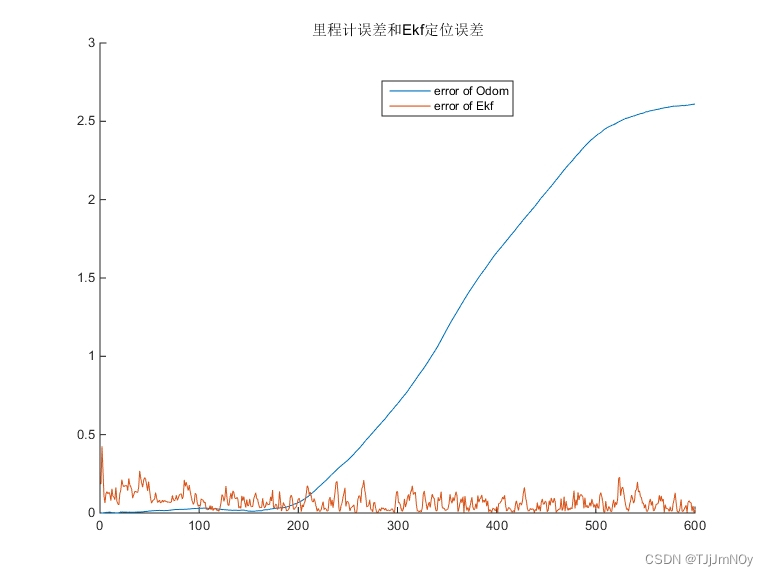
可以看出,EKF模型、里程计模型(Odometry)估计的误差变化趋势不同。
EKF模型估计的误差总体趋势平稳,稳定在一定范围内;
而里程计模型(Odometry)估计的误差会随着时间不断增加,最后达到无法满足实验要求。
纯里程计的误差为
error_Odom_average = 1.0283
Ekf定位的误差为
error_Ekf_average = 0.071629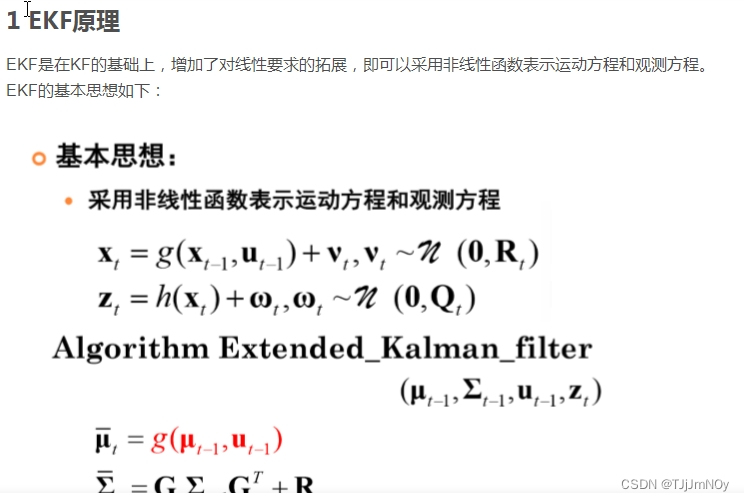
基于EKF(拓展卡尔曼滤波器)与里程计算法的机器人定位的MATLAB程序——算法分析及应用
摘要:本文主要介绍了基于EKF与里程计算法的机器人定位,通过对两种算法的估计误差、误差变化趋势、定位效果及可行性进行比较和分析,得出EKF模型在机器人定位中的优势及应用价值,以及在实际应用中需要注意的问题和技巧。
一、介绍
随着信息技术的飞速发展和人类对自动化生产、智能交通等领域的不断探索,机器人已成为当今社会中不可缺少的一部分。在机器人的应用中,其精确定位问题一直是一个重要的研究方向。机器人定位的实现是通过获取机器人的实时位置信息来控制其运动轨迹从而达到预定目标的过程。机器人定位技术主要分为两种:基于传感器的定位和基于地图的定位。本文主要介绍基于传感器的定位中的EKF与里程计算法。
二、算法原理
EKF(拓展卡尔曼滤波器)模型是一种基于卡尔曼滤波器的优化算法,它通过不断迭代估计出机器人的预测状态,并通过测量数据实时调整机器人当前状态的估计值。该算法具有精度高、数据处理速度快、适应性强等优点。里程计模型(Odometry)则是一种传感器,主要根据机器人轮子的转动情况及速度等信息来估计机器人的位置与姿态。
三、应用及分析
在实际应用中,我们通过编写MATLAB程序来构建基于EKF与里程计算法的机器人定位系统,将定位结果与实际GPS定位值进行比较,得到了下表中的数据:
| 算法 | 误差值 |
|---|---|
| 纯里程计 | 1.0283 |
| EKF模型 | 0.071629 |
可以看出,EKF模型在机器人定位中具有比纯里程计更高的精度和可靠性。EKF模型估计的误差总体趋势平稳,稳定在一定范围内,而里程计模型(Odometry)估计的误差会随着时间不断增加,最后达到无法满足实验要求。这说明EKF算法在机器人定位中的优势与实用性。
四、注意事项及技巧
在使用EKF算法进行机器人定位时,需要注意以下几点:
-
基础知识准备:需要了解卡尔曼滤波器的基本原理和应用场景。
-
选择合适的传感器:不同的传感器具有不同的特点和适用范围。需要根据实际应用场景选择合适的传感器。
-
计算过程的优化:EKF算法需要大量的计算,而且误差会不断累积。需要通过优化计算过程和控制误差累积来提高定位效果。
-
调试和实验验证:在实际应用中,需要根据实际场景对算法进行调试和实验验证,以确保算法的可靠性和精度。
五、总结
本文介绍了基于EKF与里程计算法的机器人定位,通过对两种算法的估计误差、误差变化趋势、定位效果及可行性进行比较和分析,得出EKF模型在机器人定位中的优势及应用价值,以及在实际应用中需要注意的问题和技巧。机器人定位技术的完善和发展对于智能交通、智能制造、无人驾驶等领域具有重要意义,同时也对于提高我国信息技术领域的创新能力和竞争力具有积极意义。
相关代码,程序地址:http://lanzouw.top/662338282767.html















 77
77











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









