







在计算机科学领域,尤其是在现代软件开发中,高并发处理能力是衡量技术架构性能的关键指标之一。Go语言,以其简洁的语法和内置的协程支持,为开发者提供了一套高效且易于使用的并发编程模型。本文深入剖析了Go语言协程的原理与其实现机制——GMP模型,揭示了这一模型如何巧妙地结合用户级线程与轻量级调度,以应对现代网络服务的高并发挑战。对于希望深入了解Go并发机制,或是寻求提升系统并发性能的开发者而言,本文提供了丰富的理论基础与实践洞见。

协程简介
▐ 发展历史
协程(Coroutine)的概念最早可以追溯到 20 世纪 60 年代,为了解决软硬件限制导致的 COBOL 无法实现 one-pass 编译问题,Melvin Conway 提出了一种协同式调度解决方案:其在编译器设计中将词法分析与语法分析合作运行,而不像其他编译器那样互相独立运行,两个模块来回交织,两个模块都具备让出和恢复的能力。
但在1968年,Dijkstra发表论文 Go To Statement Considered Harmful,结构化编程的理念深入人心,自顶向下的程序设计思想成为主流,协程跳来跳去的执行行为类似 goto 语句,违背自顶向下的设计思想,同时,抢占式调度的线程因其在资源管理、易用性、系统级支持以及对当时硬件环境的适应性等方面的优势,成为了那个时代并发处理的主流选择。
随着现代网络技术的发展和高并发要求,抢占式调度在处理 IO 密集型任务时的低效成为软肋,自2003年起,为了更好的利用 CPU 资源,各类高级语言开始拥抱协程。
▐ 线程实现模型
协程的实现是基于线程的实现模型,线程的实现模型分为三种:
内核级线程模型(UT : KSE = 1 : 1,eg:JVM)
用户级线程模型(UT : KSE = N : 1,eg:Java 的 Quasar,Python 的 Gevent,Js 的 Promise)
两级线程模型(也称混合型线程模型,UT : KSE = N : M,eg:Go 的 Goroutine )
Java 的 Quasar 的原理:通过字节码插桩和抛出异常的方式实现协程的挂起与恢复,从而允许在单线程中高效地调度多个轻量级的执行单元(Fiber),避免回调地狱并最大化 CPU 资源利用。
他们之间最大的差异在于用户线程(UT)与内核调度实体(KSE)之间的对应关系上。
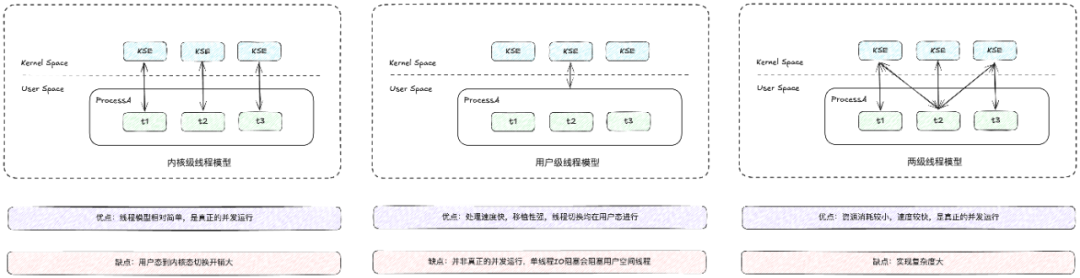
▐ 主要特点
轻量级,体现在占用资源更小,线程为 MB,协程为 KB;
用户级,体现在协程的切换在用户态完成,减少了内核态与用户态切换的开销。
GMP模型▐ 基本概念
Golang 协程实现原理是 GMP,三个主要元素:
G:Groutine,协程,用户轻量级线程,每个 Goroutine 对应一个 G 结构体,G 存储 Goroutine 的运行堆栈、状态以及任务函数,可重用。当 Goroutine 被调离 CPU 时,调度器代码负责把 CPU 寄存器的值保存在 G 对象的成员变量之中,当 Goroutine 被调度起来运行时,调度器代码又负责把 G 对象的成员变量所保存的寄存器的值恢复到 CPU 的寄存器,G 并非执行体,每个 G 需要绑定到 P 才能被调度执行。
M:Machine,OS 线程抽象,代表着真正执行计算的资源,由操作系统的调度器调度和管理。M 结构体对象除了记录着工作线程的诸如栈的起止位置、当前正在执行的 Goroutine 以及是否空闲等等状态信息之外,还通过指针维持着与 P 结构体的实例对象之间的绑定关系,在绑定有效的 P 后,进入 schedule 循环,而 schedule 循环的机制大致是从 Global 队列、P 的 Local 队列以及 wait 队列中获取 G,切换到 G 的执行栈上并执行 G 的函数,调用 goexit 做清理工作并回到 M,如此反复,M 并不保留 G 状态,这是 G 可以跨 M 调度的基础。
P:Processor,调度逻辑处理器,G 实际上是由 M 通过 P 来进行调度运行的,对 G 来说,P 相当于 CPU 核,G 只有绑定到 P (在 P 的 local runq 中)才能被调度。对 M 来说,P 提供了相关的执行环境(Context),如内存分配状态(mcache),任务队列(G)等。
其中 G 细分为以下几类:
主协程:用来执行用户main函数的协程;
主协程创建的协程:也是P调度的主要成员;
G0:每个 M 都有一个 G0 协程,是 runtime 的一部分,跟 M 绑定,主要用来执行调度逻辑的代码,不能被抢占也不会被调度(普通 G 也可以执行 runtime_procPin 禁止抢占),G0 的栈是系统分配的,比普通的 G 栈(2KB)要大,不能扩容也不能缩容;
sysmon:sysmon 是 runtime 的一部分,直接运行在 M 不需要 P,主要做一些检查工作:检查死锁、检查计时器获取下一个要被触发的计时任务、检查是否有 ready 的网络调用以恢复用户 G 的工作、检查一个 G 是否运行时间太长进行抢占式调度。
其中 M 细分为以下几类:
普通 M:用来与 P 绑定执行 G 中任务;
m0:Go 程序是一个进程,进程都有一个主线程,m0 就是 Go 程序的主线程,通过一个与其绑定的 G0 来执行 runtime 启动加载代码;一个 Go 程序只有一个 m0;
运行 sysmon 的 M:主要用来运行 sysmon 协程。
▐ 设计思想
中间态思想:没有什么是加一层中间层不能解决的,传统的线程模型可以理解为 GM 模型(这里的 G 引申为用户的并发任务),为了解决传统 GM 模型的切换开销大(内核态到用户态),并发开销大(线程为 MB 级别,并发数量受内存限制)的问题,Go 语言引入了 一层 Processor 来作为两者的中间态,Processor 的设计进一步细化了并发时分复用的调度粒度,从 MB 到 KB,实现轻量,将内核态用户态的互相切换完整放在用户态执行,实现用户级快速切换。
局部性原理:Processor 维护一个局部 Goroutine 可运行 G 队列,工作线程优先使用自己的局部运行队列,只有必要时才会去访问全局运行队列,这可以大大减少锁冲突,提高工作线程的并发性,并且可以良好的运用程序的局部性原理。
工作窃取(work stealing机制):work stealing 机制是一种用于提高并发性能的策略,其允许一个处理器(P)在没有可运行的 Goroutine 时,从其他处理器的本地队列中窃取(steal)一些 Goroutine 来执行。这种机制有助于实现负载均衡,避免某些处理器过载而其他处理器空闲的情况。
动态关联(Hand off 传递):当一个线程因为系统调用或其他原因阻塞时,GMP 不会让绑定的处理器(P)空闲,而是将当前的 P 传递给另一个线程,以便新线程可以继续执行 P 上的 Goroutine。这有助于减少因线程阻塞导致的上下文切换开销,并保持程序的并发性。
▐ 调度模型
GMP 调度模型是 Go 语言的核心,通过引入中间态 Processor来 优化传统线程模型,利用局部性原理和工作窃取机制实现高效的任务分配与负载均衡,结合动态关联策略减少阻塞影响,从而整体上大幅提高了并发处理能力,降低了资源消耗,确保了程序能够充分利用多核处理器的并行计算优势,是实现 Go 语言高并发、低延迟特性的关键所在。
根据源码可以整理出如下调度模型,其中体现了上文的核心四条设计思想,详细内容可见源码走读。

▐ 生命周期
GMP 调度器的生命周期管理是 Go 语言运行时的核心机制,其重要性体现在通过精细控制 G、M、P 的创建、分配与回收,确保了高并发环境下资源的高效利用与程序的正确执行,是实现 Go 轻量级线程高效调度和并行计算能力的基础。
其生命周期主要分为启动和循环逻辑,其中也体现了调度模型中的一些关键步骤比如 M 绑定 P,M 为 G 设置运行环境,详细内容可见源码走读。

▐ 调度时机
GMP模型结合了协同式调度与抢占式调度的特点,其中主动调度和被动调度体现了协程间的协作,而 sysmon 协程执行的抢占式调度确保了即使协程长时间运行或阻塞也能被及时中断,从而公平高效地分配 CPU 资源。
主动调度:协程通过 runtime.Goshed 方法主动让渡自己的执行权利,之后这个协程会被放到全局队列中,等待后续被执行。
被动调度:协程在休眠、channel 通道阻塞、网络 I/O 堵塞、执行垃圾回收时被暂停,被动式让渡自己的执行权利。大部分场景都是被动调度,这是 Go 高性能的一个原因,让 M 永远不停歇,不处于等待的协程让出 CPU 资源执行其他任务。
抢占式调度:sysmon 协程上的调度,当发现 G 处于系统调用(如调用网络 io )超过 20 微秒或者 G 运行时间过长(超过10ms),会抢占 G 的执行 CPU 资源,让渡给其他协程,防止其他协程没有执行的机会。
GMP源码Golang 的运行时(runtime)源码结构围绕着 GMP 模型展开,其源码结构如下:
runtime/amd_64.s:涉及到进程启动以及对 CPU 执行指令进行控制的汇编代码,进程的初始化部分也在这里面;
runtime/runtime2.go:重要数据结构的定义,比如 g、m、p 以及涉及到接口、defer、panic、map、slice 等核心类型;
runtime/proc.go:核心方法的实现,涉及 gmp 调度等核心代码在这里。
Runtime:golang 的 runtime 是与用户代码一起打包在一个可执行文件中,是程序的一部分,在 golang 语言中的关键字编译时会变成 runtime 中的函数调用,例如 go 关键字对应 runtime 中的 newproc 函数。
▐ 基本结构
基本数据结构是源码解读的切入口,特别是 G、M、P 的核心结构,每当要新增逻辑的时候,就需要考虑把状态存在什么位置,阅读基础结构可以对其功能点有个大致的了解,再顺着执行链路,可以大致了解 GMP 的运行流程,相应的代码解读如下:
g struct
g struct 详细地描述了一个 goroutine 的内部状态和功能。
其封装了诸如协程栈的边界信息、panic 和 defer 机制的管理、与之关联的 M(内核线程)指针、用于调度和恢复执行的寄存器上下文、goroutine 的生命状态标识、栈锁定机制、唯一的 goroutine ID,以及大量与调度策略、垃圾回收、信号处理、竞态条件检测、性能剖析、通道操作、系统调用、抢占机制、错误处理等等相关的状态。
// src/runtime/runtime2.go
type g struct {
// 记录协程栈的栈顶和栈底位置
stack stack // offset known to runtime/cgo
stackguard0 uintptr // offset known to liblink
stackguard1 uintptr // offset known to liblink
// 内部 panic、defer
_panic *_panic // innermost panic - offset known to liblink
_defer *_defer // innermost defer
// 当前与 goroutine 绑定的 m
m *m // current m; offset known to arm liblink
// 保存与goroutine运行位置相关的寄存器和指针,如rsp、rbp、rpc等寄存器
sched gobuf
syscallsp uintptr // if status==Gsyscall, syscallsp = sched.sp to use during gc
syscallpc uintptr // if status==Gsyscall, syscallpc = sched.pc to use during gc
syscallbp uintptr // if status==Gsyscall, syscallbp = sched.bp to use in fpTraceback
// 预期的栈顶指针,用于 traceback(回溯)
stktopsp uintptr // expected sp at top of stack, to check in traceback
// 用于做参数传递,睡眠时其他goroutine可以设置param,唤醒时该g可以读取这些param
param unsafe.Pointer
// 记录当前 goroutine 的状态
atomicstatus atomic.Uint32
// 栈锁,用于保护栈的扫描
stackLock uint32 // sigprof/scang lock; TODO: fold in to atomicstatus
// goroutine的唯一id
goid uint64
// 与调度相关的链表
schedlink guintptr
// 记录此 goroutine 阻塞的时间
waitsince int64
//如果状态为 Gwaiting,则记录阻塞原因
waitreason waitReason
// 标记是否可以被抢占
preempt bool // preemption signal, duplicates stackguard0 = stackpreempt
preemptStop bool // transition to _Gpreempted on preemption; otherwise, just deschedule
preemptShrink bool // shrink stack at synchronous safe point
// 指示 goroutine 是否在异步安全点停止
asyncSafePoint bool
// 在访问到未处理的错误地址时,会改为 panic 而不是崩溃
paniconfault bool
// 表示该 goroutine 的垃圾回收扫描工作是否已经完成
gcscandone bool
// 尽量不在垃圾回收期间分割栈
throwsplit bool
// 指示存在指向该 goroutine 栈中未上锁通道的指针
activeStackChans bool
// 指示 goroutine 即将停在通道的发送或接收上
parkingOnChan atomic.Bool
// 指示 goroutine 是否处于标记协助状态
inMarkAssist bool
// 用于协程切换的参数
coroexit bool
// 指示是否忽略竞争检测事件
raceignore int8
// 指示是否禁用来自 C 的回调
nocgocallback bool
// 与调度延迟统计相关的字段
tracking bool // whether we're tracking this G for sched latency statistics
trackingSeq uint8 // used to decide whether to track this G
trackingStamp int64 // timestamp of when the G last started being tracked
runnableTime int64 // the amount of time spent runnable, cleared when running, only used when tracking
// 锁定的 M(操作系统线程)指针
lockedm muintptr
// 与信号处理和写入缓冲区相关的字段
sig uint32
// 用于存储写缓冲区的数据
writebuf []byte
// 与信号相关的错误代码
sigcode0 uintptr
sigcode1 uintptr
// 出现信号的程序计数器位置
sigpc uintptr
// 创建此 goroutine 的父 goroutine 的唯一标识符
parentGoid uint64
// 创建该 goroutine 的语句的指令地址
gopc uintptr
// 记录创建该 goroutine 的祖先信息,通常用于调试
ancestors *[]ancestorInfo
// 记录 goroutine 函数的程序计数器
startpc uintptr
// 与竞态检测相关的上下文
racectx uintptr
// goroutine 等待某个操作的 sudog 结构
waiting *sudog
// cgo 追踪信息的上下文
cgoCtxt []uintptr
// 用于性能分析的标签
labels unsafe.Pointer
// 缓存的定时器,用于实现 time.Sleep 功能
timer *timer
// 记录睡眠结束的时间
sleepWhen int64
// 记录 goroutine 是否正在参与 select 操作以及是否有人赢得条件
selectDone atomic.Uint32
// 记录当前 goroutine 的堆栈状态,以支持性能分析
goroutineProfiled goroutineProfileStateHolder
// 协程切换过程中的参数
coroarg *coro
// 与当前 goroutine 跟踪状态相关的字段
trace gTraceState
// 用于记录垃圾回收的助力字节数,当其为正时表示 goroutine 在分配内存时可不必执行垃圾回收;为负时则要求执行垃圾回收
gcAssistBytes int64
}m struct
m struct 描述了 Go 运行时中每个操作系统线程(M)的状态和相关信息。包含指向正在运行的 goroutine (g) 的引用、系统调用相关的字段、堆栈信息、信号处理的指针,以及与内存分配、锁管理和性能分析相关的各种标志和计数器。
// src/runtime/runtime2.go
type m struct {
// 每个m都有一个对应的g0线程,用来执行调度代码,当需要执行用户代码的时候,g0会与用户goroutine发生协程栈切换
g0 *g
// 用于传递给 morestack 函数的 gobuf 参数,这个函数用于处理栈的增长
morebuf gobuf
// 对于 ARM 架构,做除法和求余操作的分母,主要与底层链接有关
divmod uint32
_ uint32 // align next field to 8 bytes
// 供调试使用,存储当前操作系统的进程 ID
procid uint64
// 指向进行信号处理的 goroutine,处理操作系统信号
gsignal *g
// Go 分配的信号处理栈,用于处理 C 代码的信号
goSigStack gsignalStack
// 保存的信号掩码,用于保存当前线程阻塞的信号
sigmask sigset
// tls作为线程的本地存储
// 其中可以在任意时刻获取绑定到当前线程上的协程g、结构体m、逻辑处理器p、特殊协程g0等信息
tls [tlsSlots]uintptr
// 启动 m 的函数
mstartfn func()
// 指向正在运行的 goroutine 对象
curg *g
// 在处理致命信号时运行的 Goroutine 的引用
caughtsig guintptr
// 当前执行 Go 代码时附加的 P(一个 Go 运行时的执行上下文)
p puintptr
// 用于调度的下一个 P 指针
nextp puintptr
// 在执行系统调用前附加的 P
oldp puintptr
// 当前 M 的唯一标识符
id int64
// 表示当前是否正在执行 malloc 操作的标志
mallocing int32
// 抛出异常时的类型
throwing throwType
// 与禁止抢占相关的字段,如果该字段不等于空字符串,要保持 curg 一直在这个 m 上运行
preemptoff string
// 当前持有的锁的数量
locks int32
// 表示当前 M 是否正在终止
dying int32
// 配置的性能分析采样频率
profilehz int32
// 标识当前 m 是否正在处于自己找工作的自旋状态
spinning bool
// 当前线程是否因等待操作而被阻塞
blocked bool
// 表示 C 线程是否调用了 sigaltstack
newSigstack bool
// 记录打印操作的锁状态
printlock int8
// 当前线程是否在执行 cgo 调用
incgo bool
// 指示此 m 是否为额外的线程
isextra bool
// 指示是否在执行 C 代码的额外线程
isExtraInC bool
// 指示是否在信号处理器中的额外线程
isExtraInSig bool
// 记录是否可以安全地释放 g0 并删除该 m
freeWait atomic.Uint32
// 是否需要额外的 m
needextram bool
// 用于追踪错误的状态
traceback uint8
// 总共进行的 cgo 调用次数
ncgocall uint64
// 当前进行中的 cgo 调用数量
ncgo int32
// 如果非零,表示 cgo 调用正在临时使用
cgoCallersUse atomic.Uint32
// 当在 cgo 调用中崩溃时用于追踪的堆栈信息
cgoCallers *cgoCallers
// 没有 goroutine 需要运行时,工作线程睡眠在这个 park 上
park note
// 指向全局的所有线程链表
alllink *m
// 指向调度链表的指针
schedlink muintptr
// 指向锁定的 goroutine 的指针
lockedg guintptr
// 用于存储创建当前线程的堆栈信息
createstack [32]uintptr
// 用于跟踪 LockOSThread
lockedExt uint32 // tracking for external LockOSThread
lockedInt uint32 // tracking for internal lockOSThread
// 下一个等待锁的线程
nextwaitm muintptr
// 与锁竞争有关的性能分析信息
mLockProfile mLockProfile
// 用于存储内存、块或互斥锁的堆栈跟踪信息
profStack []uintptr
// 在 gopark 中将参数传递给 park_m 的函数指针
waitunlockf func(*g, unsafe.Pointer) bool
// 等待锁的指针
waitlock unsafe.Pointer
// 跟踪跳过的次数
waitTraceSkip int
// 阻塞原因的枚举类型
waitTraceBlockReason traceBlockReason
// 系统调用的计时器
syscalltick uint32
// 用于调度空闲线程的链表链接
freelink *m
// 用于维护线程分析状态的信息
trace mTraceState
// 用于跟踪库调用的状态信息,方便进行性能分析
libcall libcall
libcallpc uintptr // for cpu profiler
libcallsp uintptr
libcallg guintptr
// 存储 Windows 系统调用的参数
winsyscall winlibcall
// 用于 VDSO 调用的堆栈指针和程序计数器,用于追踪和调试
vdsoSP uintptr // SP for traceback while in VDSO call (0 if not in call)
vdsoPC uintptr // PC for traceback while in VDSO call
// 完成的抢占信号的计数,用于检测抢占请求的处理情况
preemptGen atomic.Uint32
// 标记当前是否有待处理的抢占信号
signalPending atomic.Uint32
// 用于缓存程序计数器值的查找
pcvalueCache pcvalueCache
// 用于缓存程序计数器值的高速缓存
dlogPerM
// 操作系统特定的上下文信息
mOS
// 用于高效随机数生成的 ChaCha8 状态
chacha8 chacha8rand.State
// 存储用来生成随机数的种子
cheaprand uint64
// 存储当前 M 持有的锁的信息,用于锁的排序和管理
locksHeldLen int
// 维护一个数组,用于存储当前 m 持有的锁的信息(最多可持有 10 个锁)
locksHeld [10]heldLockInfo
}p struct
p struct 是 Go 语言中的一个核心数据结构,代表了一个处理器优先级的执行上下文。它包含多个字段,分别用于管理处理器的状态、调度信息、内存分配、系统调用计数、工作队列、延迟调用、GC(垃圾回收)相关操作、以及性能监测。
// src/runtime/runtime2.go
type p struct {
// 全局变量allp中的索引位置
id int32
// p的状态标识 one of pidle/prunning/...
status uint32
// 指向下一个处理器的指针,用于链式管理多个处理器
link puintptr
// 计数和性能监测相关字段
schedtick uint32 // incremented on every scheduler call
syscalltick uint32 // incremented on every system call
sysmontick sysmontick // last tick observed by sysmon
// 与该处理器关联的 M(操作系统线程)的指针,如果处理器处于闲置状态,则为 nil
m muintptr
// 用于分配微小对象和小对象的一个块的缓存空间,里面有各种不同等级的span
mcache *mcache
// 页面缓存,一个 chunk 大小(512kb)的内存空间,用来对堆上内存分配的缓存优化达到无锁访问的目的
pcache pageCache
// 与数据竞争检测相关的上下文信息
raceprocctx uintptr
// 可用的延迟(defer)结构的池,优化 defer 的使用
deferpool []*_defer
deferpoolbuf [32]*_defer
// 可以分配给g的id的缓存,每次会一次性申请16个
goidcache uint64
goidcacheend uint64
// 本地可运行的G队列的头部和尾部,达到无锁访问
runqhead uint32
runqtail uint32
// 存储可运行 goroutine 的数组,是一个使用数组实现的循环队列
runq [256]guintptr
// 指向一个即将运行的 goroutine 的指针,如果有时间片剩余,将优先调度它
runnext guintptr
// 存储已完成的 goroutine(状态为 Gdead)的结构体,供后续重用
gFree struct {
gList
n int32
}
// 用于管理 syscall 相关的结构体的缓存
sudogcache []*sudog
sudogbuf [128]*sudog
// 从堆中缓存 mspan 对象,用于优化内存分配
mspancache struct {
len int
buf [128]*mspan
}
// 单个 pinner 对象的缓存,减少重复创建时的内存分配
pinnerCache *pinner
// 跟踪状态,用于调试和分析程序
trace pTraceState
// 每个处理器的持久化内存分配器,减少锁竞争
palloc persistentAlloc // per-P to avoid mutex
// GC 性能检测仪字段
gcAssistTime int64 // Nanoseconds in assistAlloc
gcFractionalMarkTime int64 // Nanoseconds in fractional mark worker (atomic)
limiterEvent limiterEvent // limiterEvent tracks events for the GC CPU limiter
// 标记工作者的运行模式,用于协调 GC 相关的执行
gcMarkWorkerMode gcMarkWorkerMode
// 上一个标记工作者开始的时间戳
gcMarkWorkerStartTime int64
// 此处理器的 GC 工作缓冲区缓存,管理内存工作
gcw gcWork
// 此处理器的 GC 写入屏障缓冲区
wbBuf wbBuf
// 指示在下一个安全点是否运行 sched.safePointFn
runSafePointFn uint32 // if 1, run sched.safePointFn at next safe point
// 当前处理器是否正在写入统计信息的计数器
statsSeq atomic.Uint32
// 定时器堆,用于管理定时操作
timers timers
// 记录活跃 goroutine 占用的最大栈空间
maxStackScanDelta int64
// 记录此处理器上扫描的 goroutine 栈的信息
scannedStackSize uint64 // stack size of goroutines scanned by this P
scannedStacks uint64 // number of goroutines scanned by this P
// 用于处理抢占
preempt bool
// 最近一次进入 GC 停止状态的时间戳
gcStopTime int64
}▐ 调度启动
rt0_go
调度器的初始化和启动调度循环是在进程初始化是处理的,Go 进程的启动是通过汇编代码进行的,入口函数在 asm_amd64.s 中的 runtime.rt0_go
// src/runtime/asm_amd64.s
// m0 和 g0 互相绑定
get_tls(BX)
LEAQ runtime·g0(SB), CX
MOVQ CX, g(BX)
LEAQ runtime·m0(SB), AX
// save m->g0 = g0
MOVQ CX, m_g0(AX)
// save m0 to g0->m
MOVQ AX, g_m(CX)
// 检测初始化过程中的一些条件,比如参数的合法性等
CALL runtime·check(SB)
// 初始化 Go 运行时的参数处理
CALL runtime·args(SB)
// 进行操作系统相关的初始化,这个函数不同的操作系统有不同的实现
CALL runtime·osinit(SB)
// 初始化 Go 的调度器,为 Goroutine 的管理做好准备
CALL runtime·schedinit(SB)
// 创建主协程,主 Goroutine 创建完成后被加入到 p 的运行队列中,等待调度
MOVQ $runtime·mainPC(SB), AX
PUSHQ AX
CALL runtime·newproc(SB)
POPQ AX
// 启动 Machine,开始调度 Goroutine
// 在 g0 上启动调用 runtime.mstart 启动调度循环
// 首先可以被调度执行的就是主 Goroutine
// 然后主协程获得运行的 cpu 则执行 runtime.main 进而执行到用户代码的 main 函数
CALL runtime·mstart(SB)schedt
在 runtime 中全局变量 sched 代表全局调度器,数据结构为 schedt 结构体,保存了调度器的状态信息、全局可运行 G 队列。
// src/runtime/runtime2.go
type schedt struct {
// 用来为goroutine生成唯一id,需要以原子访问形式进行访问
goidgen atomic.Uint64
// 上一次网络轮询的时间。如果当前正在轮询,则值为 0
lastpoll atomic.Int64
// 当前轮询睡眠到的时间
pollUntil atomic.Int64
// 用于保护调度器内部数据结构的互斥锁,以确保并发安全
lock mutex
// 等待工作的空闲 m(机器)的指针链表
midle muintptr
// 空闲的工作线程数量
nmidle int32
// 空闲的且被 lock 的 m 的数量
nmidlelocked int32
// m 的创建计数和下一个 M ID
mnext int64
// 允许的最大 m 数量,超出后将导致程序中止
maxmcount int32
// 不计算在死锁中的系统 m 的数量
nmsys int32
// 释放的 m 的累计数量
nmfreed int64
// 当前系统 goroutine 的数量
ngsys atomic.Int32
// 等待工作的空闲 p(处理器)的指针链表
pidle puintptr
// 当前空闲 p 的数量
npidle atomic.Int32
// 正在进行自旋的 m 的数量
nmspinning atomic.Int32
// 表示是否需要自旋的原子布尔值;更改时需持有调度锁
needspinning atomic.Uint32
// 全局可运行队列,存储可以运行的 goroutine
runq gQueue
// 可运行队列的大小
runqsize int32
// 控制调度的结构体,允许用户禁用用户 goroutines 的调度
disable struct {
user bool
runnable gQueue // pending runnable Gs
n int32 // length of runnable
}
// 存放死亡 goroutine 的全局缓存,便于重用
gFree struct {
lock mutex
stack gList // Gs with stacks
noStack gList // Gs without stacks
n int32
}
// 用于保护 sudog(用于同步的结构体)的互斥锁
sudoglock mutex
// sudog 的中央缓存
sudogcache *sudog
// 用于保护 defer 结构体的互斥锁
deferlock mutex
// defer 的中央池,管理可用的 defer 结构体
deferpool *_defer
// 等待释放的 m 的链表,当其 m.exited 被设置时释放
freem *m
// 指示 GC 是否正在等待运行
gcwaiting atomic.Bool
// 用于停止调度的控制机制
stopwait int32
stopnote note
// 系统监视器是否在等待的原子布尔值
sysmonwait atomic.Bool
// 用于系统监视器的通知信号
sysmonnote note
// 在每次 GC 的安全点调用的函数
safePointFn func(*p)
// 记录安全点的等待时间
safePointWait int32
safePointNote note
// CPU Profiling 的速率
profilehz int32
// 最近一次改变 goroutine 数量(gomaxprocs)的时间
procresizetime int64
// 记录上次改变 gomaxprocs 时的总时间
totaltime int64
// 保护系统监视器操作的互斥锁
sysmonlock mutex
// 调度延迟的分布数据,表示 goroutine 在可运行状态的总时间
timeToRun timeHistogram
// 处理器空闲状态下的累计 CPU 时间。每次 GC 周期重置
idleTime atomic.Int64
// 由于等待同步原语(如互斥锁)而导致的累计等待时间
totalMutexWaitTime atomic.Int64
// 定义 STW 延迟的分布,分别用于 GC 相关和其他类型的 STW
stwStoppingTimeGC timeHistogram
stwStoppingTimeOther timeHistogram
// 定义 STW 的总延迟,是 stwStoppingTimeGC/Other 的超集
stwTotalTimeGC timeHistogram
stwTotalTimeOther timeHistogram
// goroutine 在等待运行时锁的累计等待时间,包括所有已退出的 M 的锁等待时间
totalRuntimeLockWaitTime atomic.Int64
}schedinit
// src/runtime/proc.go
func schedinit() {
// 初始化调度相关的各种锁,确保多线程环境的安全性
lockInit(&sched.lock, lockRankSched)
lockInit(&sched.sysmonlock, lockRankSysmon)
lockInit(&sched.deferlock, lockRankDefer)
lockInit(&sched.sudoglock, lockRankSudog)
lockInit(&deadlock, lockRankDeadlock)
lockInit(&paniclk, lockRankPanic)
lockInit(&allglock, lockRankAllg)
lockInit(&allpLock, lockRankAllp)
lockInit(&reflectOffs.lock, lockRankReflectOffs)
lockInit(&finlock, lockRankFin)
lockInit(&cpuprof.lock, lockRankCpuprof)
allocmLock.init(lockRankAllocmR, lockRankAllocmRInternal, lockRankAllocmW)
execLock.init(lockRankExecR, lockRankExecRInternal, lockRankExecW)
traceLockInit()
lockInit(&memstats.heapStats.noPLock, lockRankLeafRank)
// 获取当前 goroutine
gp := getg()
// 如果竞争检测被启用,则初始化竞争检测上下文
if raceenabled {
gp.racectx, raceprocctx0 = raceinit()
}
// 最大 M 的计数设置
sched.maxmcount = 10000
// 将 crash 文件描述符设置为最大值
crashFD.Store(^uintptr(0))
// The world starts stopped.
worldStopped()
// 尽早初始化 tick 计时器
ticks.init()
// 模块数据验证
moduledataverify()
// 栈初始化
stackinit()
// 内存分配初始化
mallocinit()
// 获取早期的 GODEBUG 环境变量
godebug := getGodebugEarly()
// 初始化 CPU 配置,必须在算法初始化之前运行
cpuinit(godebug)
// 初始化随机数生成器
randinit()
// 初始化映射、哈希和随机数算法,不能在这之前使用
alginit()
// 进行常见的初始化,传入当前 M
mcommoninit(gp.m, -1)
// 初始化模块,提供 activeModules
modulesinit()
// 初始化类型链接,依赖于 activeModules
typelinksinit()
// 初始化接口表,依赖于 activeModules
itabsinit()
// 栈对象初始化,必须在 GC 启动之前调用
stkobjinit()
// 保存当前信号屏蔽
sigsave(&gp.m.sigmask)
// 初始化信号屏蔽
initSigmask = gp.m.sigmask
// 解析 Go 程序的命令行参数
goargs()
// 解析 Go 程序的环境变量
goenvs()
// 进行安全性初始化
secure()
// 检查文件描述符
checkfds()
// 解析调试变量
parsedebugvars()
// 初始化垃圾回收
gcinit()
// 分配用于处理错栈条件(如 g0 处的 morestack)时的堆栈空间
gcrash.stack = stackalloc(16384)
gcrash.stackguard0 = gcrash.stack.lo + 1000
gcrash.stackguard1 = gcrash.stack.lo + 1000
// 如果禁用内存分析,更新 MemProfileRate 为 0 以关闭内存分析
if disableMemoryProfiling {
MemProfileRate = 0
}
// 初始化当前 M 的性能堆栈
mProfStackInit(gp.m)
// 加锁,保护调度器状态
lock(&sched.lock)
// 存储最后轮询时间
sched.lastpoll.Store(nanotime())
// 初始化 P
procs := ncpu
if n, ok := atoi32(gogetenv("GOMAXPROCS")); ok && n > 0 {
procs = n
}
// 调整可运行 goroutine 的数量
if procresize(procs) != nil {
throw("unknown runnable goroutine during bootstrap")
}
// 解锁
unlock(&sched.lock)
// World is effectively started now, as P's can run
worldStarted()
// 这个条件不应该被触发。仅作为保证 runtime·buildVersion 保存到生成的二进制文件中
if buildVersion == "" {
buildVersion = "unknown"
}
// 这个条件不应该被触发。仅作为保证 runtime·modinfo 保存到生成的二进制文件中
if len(modinfo) == 1 {
modinfo = ""
}
}mstart0
调度系统时在 runtime.mstart0 函数中启动,这个函数是在 m0 的 g0 上执行的。
// src/runtime/proc.go
// 定义mstart0函数,负责每个新线程的启动过程
func mstart0() {
// 获取当前的G(goroutine)结构体指针
gp := getg()
// 检查当前线程的栈底(lo)是否为0,判断是否使用系统分配的栈
osStack := gp.stack.lo == 0
if osStack {
size := gp.stack.hi
if size == 0 {
size = 16384 * sys.StackGuardMultiplier
}
gp.stack.hi = uintptr(noescape(unsafe.Pointer(&size)))
gp.stack.lo = gp.stack.hi - size + 1024
}
// 初始化栈保护,以便可以开始调用常规的 Go 代码
gp.stackguard0 = gp.stack.lo + stackGuard
gp.stackguard1 = gp.stackguard0
// 调用mstart1函数,继续线程的启动过程
mstart1()
// 如果栈是系统分配的
if mStackIsSystemAllocated() {
osStack = true
}
// 调用mexit函数,退出线程并传递 osStack 状态
mexit(osStack)
}
// 定义 mstart1 函数,处理进一步的线程初始化
func mstart1() {
// 获取当前的G(goroutine)结构体指针
gp := getg()
// 检查当前 G 是否为 g0,调度器只在 g0 上执行
if gp != gp.m.g0 {
throw("bad runtime·mstart")
}
gp.sched.g = guintptr(unsafe.Pointer(gp))
gp.sched.pc = getcallerpc()
gp.sched.sp = getcallersp()
asminit()
// 初始化 m,主要是设置线程的备用信号堆栈和信号掩码
minit()
// 如果当前 g 的 m 是初始 m0,执行 mstartm0()
if gp.m == &m0 {
mstartm0()
}
// 如果有 m 的起始任务函数,则执行,比如 sysmon 函数
// 对于 m0 来说,是没有 mstartfn 的
if fn := gp.m.mstartfn; fn != nil {
fn()
}
// 如果不是 m0,需要绑定 p
if gp.m != &m0 {
acquirep(gp.m.nextp.ptr())
gp.m.nextp = 0
}
// 进入调度循环,永不返回
schedule()
}main
当经过初始的调度,主协程获取执行权后,首先进入的就是 runtime.main 函数。
// src/runtime/proc.go
// The main goroutine.
func main() {
// 获取主线程
mp := getg().m
mp.g0.racectx = 0
// 设置最大堆栈大小,64位系统为1GB,32位系统为250MB
if goarch.PtrSize == 8 {
maxstacksize = 1000000000
} else {
maxstacksize = 250000000
}
// 设置最大堆栈的上限,避免调用 SetMaxStack 后分配堆栈过大导致随机崩溃
maxstackceiling = 2 * maxstacksize
// 允许 newproc 启动新的 OS 线程
mainStarted = true
// 如果有系统监视器,启动 sysmon(系统监视线程)
if haveSysmon {
systemstack(func() {
// 分配一个新的 m,运行 sysmon 系统后台监控(定期垃圾回收和调度抢占)
newm(sysmon, nil, -1)
})
}
// 锁定主协程到当前的主操作系统线程
lockOSThread()
// 确保主协程在 m0 上
if mp != &m0 {
throw("runtime.main not on m0")
}
// 记录 the world started 的时间
runtimeInitTime = nanotime()
if runtimeInitTime == 0 {
throw("nanotime returning zero")
}
// 如果启用了初始化追踪
if debug.inittrace != 0 {
inittrace.id = getg().goid
inittrace.active = true
}
// 执行初始化任务,必须在 defer 之前
doInit(runtime_inittasks)
// defer 解锁,以便在执行 Goexit 时也能解锁
needUnlock := true
defer func() {
if needUnlock {
unlockOSThread()
}
}()
// 启用垃圾回收
gcenable()
// 创建主初始化完成的信道
main_init_done = make(chan bool)
// 如果使用 Cgo,则执行相应的检查和初始化
if iscgo {
if _cgo_pthread_key_created == nil {
throw("_cgo_pthread_key_created missing")
}
if _cgo_thread_start == nil {
throw("_cgo_thread_start missing")
}
if GOOS != "windows" {
if _cgo_setenv == nil {
throw("_cgo_setenv missing")
}
if _cgo_unsetenv == nil {
throw("_cgo_unsetenv missing")
}
}
if _cgo_notify_runtime_init_done == nil {
throw("_cgo_notify_runtime_init_done missing")
}
if set_crosscall2 == nil {
throw("set_crosscall2 missing")
}
set_crosscall2()
startTemplateThread()
cgocall(_cgo_notify_runtime_init_done, nil)
}
// 运行初始化任务
for m := &firstmoduledata; m != nil; m = m.next {
doInit(m.inittasks)
}
// 禁用初始化追踪,以避免在 malloc 和 newproc 中收集统计数据的开销
inittrace.active = false
// 关闭主初始化完成信道
close(main_init_done)
needUnlock = false
// 解锁主线程
unlockOSThread()
// 如果是 C 归档或共享库,不执行 main 函数
if isarchive || islibrary {
return
}
// 调用 main.main 函数,间接调用以防止链接器在布局运行时时不知道 main 包的地址
fn := main_main
fn()
// 如果启用了竞争检测,运行退出钩子
if raceenabled {
runExitHooks(0)
racefini()
}
// 如果在主返回时有其他协程正在崩溃,则等待其他协程完成崩溃追踪
if runningPanicDefers.Load() != 0 {
for c := 0; c < 1000; c++ {
if runningPanicDefers.Load() == 0 {
break
}
Gosched()
}
}
// 如果处于崩溃状态,则等待
if panicking.Load() != 0 {
gopark(nil, nil, waitReasonPanicWait, traceBlockForever, 1)
}
// 运行退出钩子
runExitHooks(0)
// 退出程序
exit(0)
// 这个循环永远不会执行
for {
var x *int32
*x = 0
}
}▐ 调度循环
调度循环启动之后,便会进入一个无限循环中,不断的执行以下循环 :
schedule
execute
gogo
goroutine任务
goexit
goexit1
mcall
goexit0
schedule
其中调度的过程是在 m 的 g0 上执行的,而 goroutine 任务 -> goexit -> goexit1 -> mcall 则是在 goroutine 的堆栈空间上执行的。
schedule
// src/runtime/proc.go
// 一次调度器的轮次:查找可运行的 goroutine 并执行
func schedule() {
mp := getg().m
// 前置检查
if mp.locks != 0 {
throw("schedule: holding locks")
}
if mp.lockedg != 0 {
stoplockedm()
execute(mp.lockedg.ptr(), false) // Never returns.
}
if mp.incgo {
throw("schedule: in cgo")
}
top:
// 获取当前的 P 并重置抢占标记
pp := mp.p.ptr()
pp.preempt = false
// 安全检查:如果正在自旋,运行队列应该是空的
if mp.spinning && (pp.runnext != 0 || pp.runqhead != pp.runqtail) {
throw("schedule: spinning with local work")
}
// 查找可运行的 goroutine(会阻塞直到有可运行的 goroutine)
gp, inheritTime, tryWakeP := findRunnable()
if debug.dontfreezetheworld > 0 && freezing.Load() {
lock(&deadlock)
lock(&deadlock)
}
// 重置自旋状态
if mp.spinning {
resetspinning()
}
// 如果当前用户调度被禁用,且该 goroutine 的调度也是禁用的
// 将其放入待定可运行的 goroutine 列表,以待重新启用用户调度时处理
if sched.disable.user && !schedEnabled(gp) {
lock(&sched.lock)
if schedEnabled(gp) {
unlock(&sched.lock)
} else {
sched.disable.runnable.pushBack(gp)
sched.disable.n++
unlock(&sched.lock)
goto top
}
}
// 如果即将调度一个非正常的 goroutine(例如 GC worker 或 tracereader)
// 则唤醒 P(逻辑处理器)如果有可用的
if tryWakeP {
wakep()
}
if gp.lockedm != 0 {
startlockedm(gp)
goto top
}
// 执行找到的可运行的 goroutine
execute(gp, inheritTime)
}findrunnalbe
findrunnalbe 中首先从本地队列中检查,然后从全局队列中寻找,再从就绪的网络协程,如果这几个没有就去其他 p 的本地队列偷一些任务。
// src/runtime/proc.go
// Finds a runnable goroutine to execute.
func findRunnable() (gp *g, inheritTime, tryWakeP bool) {
mp := getg().m
top:
pp := mp.p.ptr()
// 如果 GC 正在等待,停止 M
if sched.gcwaiting.Load() {
gcstopm()
goto top
}
if pp.runSafePointFn != 0 {
runSafePointFn()
}
// now 和 pollUntil 会被保存,以便于后续的工作窃取
now, pollUntil, _ := pp.timers.check(0)
// 尝试调度 trace reader
if traceEnabled() || traceShuttingDown() {
gp := traceReader()
if gp != nil {
trace := traceAcquire()
casgstatus(gp, _Gwaiting, _Grunnable)
if trace.ok() {
trace.GoUnpark(gp, 0)
traceRelease(trace)
}
return gp, false, true
}
}
// 尝试调度 GC worker
if gcBlackenEnabled != 0 {
gp, tnow := gcController.findRunnableGCWorker(pp, now)
if gp != nil {
return gp, false, true
}
now = tnow
}
// 每 61 次检查一次全局可运行队列,以确保公平性
if pp.schedtick%61 == 0 && sched.runqsize > 0 {
lock(&sched.lock)
// 尝试从全局队列获取一个 goroutine
gp := globrunqget(pp, 1)
unlock(&sched.lock)
if gp != nil {
return gp, false, false
}
}
// 唤醒最终器 goroutine
if fingStatus.Load()&(fingWait|fingWake) == fingWait|fingWake {
if gp := wakefing(); gp != nil {
ready(gp, 0, true)
}
}
// 处理 Cgo 的 yield 调用
if *cgo_yield != nil {
asmcgocall(*cgo_yield, nil)
}
// 从本地运行队列中获取 goroutine
if gp, inheritTime := runqget(pp); gp != nil {
return gp, inheritTime, false
}
// 从全局运行队列中获取 goroutine
if sched.runqsize != 0 {
lock(&sched.lock)
gp := globrunqget(pp, 0)
unlock(&sched.lock)
if gp != nil {
return gp, false, false
}
}
// 从就绪的网络协程中查找
if netpollinited() && netpollAnyWaiters() && sched.lastpoll.Load() != 0 {
if list, delta := netpoll(0); !list.empty() {
gp := list.pop()
injectglist(&list)
netpollAdjustWaiters(delta)
trace := traceAcquire()
casgstatus(gp, _Gwaiting, _Grunnable)
if trace.ok() {
trace.GoUnpark(gp, 0)
traceRelease(trace)
}
return gp, false, false
}
}
// 转为自旋状态,尝试从其他 P 中窃取工作
if mp.spinning || 2*sched.nmspinning.Load() < gomaxprocs-sched.npidle.Load() {
if !mp.spinning {
mp.becomeSpinning()
}
gp, inheritTime, tnow, w, newWork := stealWork(now)
if gp != nil {
return gp, inheritTime, false
}
if newWork {
goto top
}
now = tnow
if w != 0 && (pollUntil == 0 || w < pollUntil) {
pollUntil = w
}
}
...
}execute
整个函数的主要目的:
将一个准备运行的 goroutine (gp) 切换到运行状态(_Grunning);
确保在切换期间做出必要的状态更新和性能分析记录;
处理 M(机器状态)与 G(goroutine)之间的关联,确保资源的正确分配与管理;
考虑多线程环境中的调度与性能监控,保证程序的健壮性和性能有效性。
// src/runtime/proc.go
func execute(gp *g, inheritTime bool) {
mp := getg().m
// 如果 goroutine 性能分析器处于活动状态
// 确保 gp(即当前要执行的 goroutine)其栈已写入到分析器中
if goroutineProfile.active {
tryRecordGoroutineProfile(gp, nil, osyield)
}
mp.curg = gp
gp.m = mp
// 将 gp 的状态从 _Grunnable 设置为 _Grunning(表示该 goroutine 正在运行)
casgstatus(gp, _Grunnable, _Grunning)
gp.waitsince = 0
// 将被抢占标志设置为 false,意味着该 goroutine 目前不会被抢占
gp.preempt = false
gp.stackguard0 = gp.stack.lo + stackGuard
if !inheritTime {
mp.p.ptr().schedtick++
}
// 检查性能分析器是否需要开启或关闭
hz := sched.profilehz
if mp.profilehz != hz {
setThreadCPUProfiler(hz)
}
// 获取一个跟踪对象,记录性能数据
trace := traceAcquire()
if trace.ok() {
trace.GoStart()
traceRelease(trace)
}
// 切换到待执行 g (goroutine) 的调度状态,开始执行该 goroutine
gogo(&gp.sched)
}gogo
gogo 由汇编实现,主要是由 g0 切换到 g 栈,然后执行函数。
// src/runtime/asm_amd64.s
TEXT runtime·gogo(SB), NOSPLIT, $0-8
// gobuf
MOVQ buf+0(FP), BX
MOVQ gobuf_g(BX), DX
// make sure g != nil
MOVQ 0(DX), CX
JMP gogo<>(SB)goexit
当调用任务函数结束返回的时候,会执行到在创建 g 流程中就初始化好的指令:goexit
// src/runtime/asm_arm64.s
TEXT runtime·goexit(SB),NOSPLIT|NOFRAME|TOPFRAME,$0-0
MOVD R0, R0
BL runtime·goexit1(SB)// src/runtime/proc.go
func goexit1() {
// 如果竞争检测功能被启用
if raceenabled {
// 结束竞争检测的操作
racegoend()
}
// 获取跟踪信息
trace := traceAcquire()
// 如果跟踪信息成功获取
if trace.ok() {
// 调用结束跟踪的函数
trace.GoEnd()
// 释放跟踪信息
traceRelease(trace)
}
// 调用 mcall 函数开始执行 goexit0
mcall(goexit0)
}
// goexit0 函数在 g0 上继续执行。
func goexit0(gp *g) {
// 销毁给定的 goroutine(gp)
gdestroy(gp)
// 调用调度器进行下一轮调度
schedule()
}▐ 调度时机
goshed
协程可以选择主动让渡自己的执行权利,大多数情况下不需要这么做,但通过 runtime.Goched 可以做到主动让渡。
Gosched 函数用于显式告诉调度器,现在可以切换到其他 goroutine。这是通过用户请求而非系统决定的方式切换 goroutine。
// src/runtime/proc.go
func Gosched() {
// 检查是否有超时的任务
checkTimeouts()
// 调用 gosched_m 函数进行调度
mcall(gosched_m)
}
func gosched_m(gp *g) {
// 调用 goschedImpl 函数,传入当前 goroutine(gp)和一个表示没有被抢占的标志
goschedImpl(gp, false)
}
func goschedImpl(gp *g, preempted bool) {
// 获取跟踪信息
trace := traceAcquire()
// 读取当前 goroutine 的状态
status := readgstatus(gp)
// 检查 goroutine 的状态,确保其正在运行
if status&^_Gscan != _Grunning {
// 如果状态不正确,打印状态信息并抛出错误
dumpgstatus(gp)
throw("bad g status")
}
// 如果跟踪信息是有效的
if trace.ok() {
// 在状态转变前记录事件
if preempted {
// 如果被抢占,则记录被抢占事件
trace.GoPreempt()
} else {
// 否则记录调度事件
trace.GoSched()
}
}
// 尝试将当前 goroutine 状态从 _Grunning 更改为 _Grunnable
// 这是 atomic 操作,确保无竞争条件
casgstatus(gp, _Grunning, _Grunnable)
// 如果跟踪信息有效,释放跟踪信息
if trace.ok() {
traceRelease(trace)
}
// 释放当前 goroutine 的资源
dropg()
// 获得调度锁
lock(&sched.lock)
// 将当前 goroutine 放入全局运行队列
globrunqput(gp)
// 解锁调度锁
unlock(&sched.lock)
// 如果主程序已经启动,唤醒等待的 goroutine
if mainStarted {
wakep()
}
// 调用调度函数,切换到其他可以运行的 goroutine
schedule()
}gopark
大部分情况下的调度都是被动调度,当协程在休眠、channel 通道阻塞、网络 IO 阻塞、执行垃圾回收时会暂停,被动调度可以保证最大化利用 CPU 资源。被动调度是协程发起的操作,所以调度时机相对明确。
首先从当前栈切换到 g0 协程,被动调度不会将 G 放入全局运行队列,所以被动调度需要一个额外的唤醒机制。
这里面涉及的函数主要是 gopark 和 ready 函数,gopark 函数用来完成被动调度,由_ Grunning 变为 _Gwaiting 状态。
// src/runtime/proc.go
func gopark(unlockf func(*g, unsafe.Pointer) bool, lock unsafe.Pointer, reason waitReason, traceReason traceBlockReason, traceskip int) {
// 如果等待原因不是等待休眠,则检查超时情况
if reason != waitReasonSleep {
checkTimeouts()
}
mp := acquirem()
gp := mp.curg
// 读取当前 goroutine 的状态
status := readgstatus(gp)
// 检查当前 goroutine 状态是否是运行或扫描运行
if status != _Grunning && status != _Gscanrunning {
throw("gopark: bad g status")
}
// 设置等待锁
mp.waitlock = lock
// 设置解锁函数
mp.waitunlockf = unlockf
// 设置等待原因
gp.waitreason = reason
// 设置追踪块原因
mp.waitTraceBlockReason = traceReason
// 设置追踪跳过
mp.waitTraceSkip = traceskip
// 释放当前的 M
releasem(mp)
// 调用 park_m 函数进行真正的等待
mcall(park_m)
}
// park_m 是处理 goroutine 等待的具体实现
func park_m(gp *g) {
// 获取当前的 M
mp := getg().m
// 获取追踪信息
trace := traceAcquire()
if trace.ok() {
// 在转换之前追踪事件,可能会获取栈信息
trace.GoPark(mp.waitTraceBlockReason, mp.waitTraceSkip)
}
// 将 goroutine 状态从运行设置为等待
casgstatus(gp, _Grunning, _Gwaiting)
if trace.ok() {
// 释放追踪信息
traceRelease(trace)
}
// 释放当前 goroutine
dropg()
// 如果有解锁函数,就执行它
if fn := mp.waitunlockf; fn != nil {
// 执行解锁函数
ok := fn(gp, mp.waitlock)
// 清空解锁函数
mp.waitunlockf = nil
// 清空锁
mp.waitlock = nil
if !ok {
// 获取追踪信息
trace := traceAcquire()
// 状态从等待改为可运行
casgstatus(gp, _Gwaiting, _Grunnable)
if trace.ok() {
trace.GoUnpark(gp, 2)
traceRelease(trace)
}
// 将 goroutine 重新安排,且不会返回
execute(gp, true)
}
}
// 调度器调度其他 goroutine
schedule()
}retake
如果一个 g 运行时间过长就会导致其他 g 难以获取运行机会,当进行系统调用时也存在会导致其他 g 无法运行情况;当出现这两种情况时,为了让其他 g 有运行机会,则会进行抢占式调度。
// src/runtime/proc.go
func retake(now int64) uint32 {
n := 0
lock(&allpLock)
// 遍历所有的 p
for i := 0; i < len(allp); i++ {
pp := allp[i]
if pp == nil {
continue
}
pd := &pp.sysmontick
s := pp.status
sysretake := false
if s == _Prunning || s == _Psyscall {
// 如果 G 正在同一个调度时间片上运行太长时间,则强制抢占
t := int64(pp.schedtick)
if int64(pd.schedtick) != t {
pd.schedtick = uint32(t)
pd.schedwhen = now
} else if pd.schedwhen+forcePreemptNS <= now {
// 如果连续运行 10ms 则进行抢占
preemptone(pp)
sysretake = true
}
}
// 针对系统调用情况进行抢占
// 如果 p 的运行队列中有等待运行的 g 则抢占
// 如果没有空闲的 p 则进行抢占
// 系统调用时间超过 10ms 则进行抢占
if s == _Psyscall {
t := int64(pp.syscalltick)
if !sysretake && int64(pd.syscalltick) != t {
pd.syscalltick = uint32(t)
pd.syscallwhen = now
continue
}
if runqempty(pp) && sched.nmspinning.Load()+sched.npidle.Load() > 0 && pd.syscallwhen+10*1000*1000 > now {
continue
}
unlock(&allpLock)
incidlelocked(-1)
trace := traceAcquire()
if atomic.Cas(&pp.status, s, _Pidle) {
if trace.ok() {
trace.ProcSteal(pp, false)
traceRelease(trace)
}
n++
pp.syscalltick++
handoffp(pp)
} else if trace.ok() {
traceRelease(trace)
}
incidlelocked(1)
lock(&allpLock)
}
}
unlock(&allpLock)
return uint32(n)
}
结语
总之,本文是一篇关于协程原理与实现的深度解析,重点聚焦于Golang的GMP模型,通过历史背景、理论基础、源码分析等多个维度,全面阐述了协程在现代软件开发中的应用与优化策略。
¤ 拓展阅读 ¤


















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









