- 博客(13)
- 资源 (1)
- 收藏
- 关注
 RSS订阅
RSS订阅原创 python-Opencv cv2.VideoWriter写视频失败,无法打开,大小不正常,
【代码】pythonOpencv cv2.VideoWriter写视频失败,无法打开,大小不正常,
2023-08-02 13:50:57
 2229
2229
 1
1
原创 【windows下Opencv-cuda版本环境配置,简易版本】
opencv在4.0后提供了GPU加速,但是目前pip安装的是默认不适用cuda的,因此下面重新安装。
2023-06-01 16:01:35
1515
1
原创 [ERROR]: Action client not connected:***/arm_trajectory_controller
这里写自定义目录标题出现原因解决方法方法1.修改moveit_config方法2 控制器名字修改出现原因Moveit配置机械臂时,点的是自动配置ROS Control,配置的名字会是group名字加上_controller。也就是下面的名字没有中间的trajectory(下面是我已经修改过的,用的是第一种方法)。我实际配置的控制器在config/arm_controller中(每个人路径不一样,看你launch文件load的是哪个配置文件),我配置的控制器名字如下:名字不一样导致出问题,无法加载
2021-12-19 16:56:39
2713
1
原创 Maskrcnn实现笔记---roialign篇
目录前言一、ROIalign的输入输出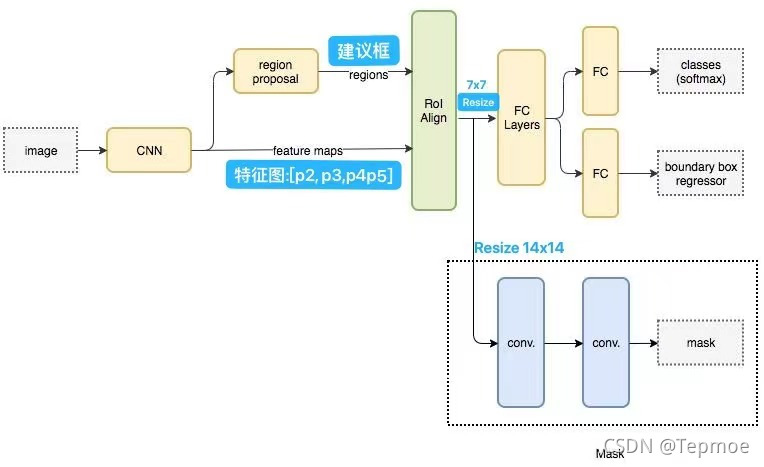二、1.引入库2.读入数据总结前言ROIAlign主要就是利
2021-11-08 16:52:54
1960
原创 Maskrcnn实现笔记---锚框及建议框生成篇
目录前言一、MaskRcnn特征网络二、锚框生成1.锚框参数设置2.锚框生成流程三.经过rpn网络后的框后续处理1.anchors转换为建议框2.修剪超出图像范围内的建议框3.选取建议框进行下一步检测与分割总结前言Mask-rcnn为两阶段目标检测网络,第一阶段为特征提取生成建议框;第二阶段为根据建议框截取特征,处理截取特征得到分类、标签及掩码。一、MaskRcnn特征网络MaskRcnn特征提取网络一般采用resnet101+FPN网络,将生成五个不同大小的特征图P2,P3,P4,P5,P6。
2021-11-05 21:07:16
3750
原创 Maskrcnn实现笔记---数据处理篇
Maskrcnn实现笔记—数据处理篇maskrcnn笔记。目录Maskrcnn实现笔记---数据处理篇前言一、labelme标定二、对data进一步处理1.数据增强2.json_to_dataset三、实际训练前言在深度学习中,数据集一般是指用作网络训练的数据集合。数据集包含输入和真实输出(ground truth)两部分,视觉类深度学习中输入为图片,输出为分类结果、预测框及分割结果等。数据集一般会分为训练集(train dataset)、验证集(valid dataset)和测试集(test
2021-11-03 20:55:47
1403
7
原创 Could not find resource ‘[]‘ in ‘hardware_interface::EffortJointInterface‘.
场景:ur10e的gazebo仿真中加载控制器,显示Could not find resource ‘[]’ in ‘hardware_interface::EffortJointInterface’。解决方案:第一反应先去查看了launch文件,找到了加载失败的控制器名字。找到控制器名字后,去config中找到对应的控制器配置.yaml文件。看到里面joint_contrller的类型都是力控,检查了下没发现有其他问题。最后去看看ur10e的ur.transmission.xacro文件,
2021-10-09 10:17:57
2109
原创 ur10e+2f_140夹爪moveit配置
1.导入2.配置自碰撞矩阵3.配置虚拟关节如果机器人是移动的,虚拟关节可以和移动基座关联,目前配置的是固定的,不用配置。4.创建规划组5.定义机器人位姿没定义夹爪的开闭,因为总是莫名其妙出错,暂时没找到问题原因。6.配置终端夹爪7.配置无用关节也就是一些被动关节,没有驱动的那种7.控制器设置输出就行,Simiulation里生成的urdf是用来仿真的,我存下来了。最后自己设置下输出路径,运行生成的config包里的demo,试了下没什么问题。参考了书籍和下面的博主:
2021-08-09 11:37:23
3089
10
原创 机械臂—ROS下UR10e+ft300+2f-140gripper ur机械臂配置夹爪及问题解决
这里写自定义目录标题目录一、环境二、ROS melodic及Moveit的安装三、UR机械臂、Robtiq功能包下载四、功能包介绍五、建立自己的包六、传感器和夹爪配置七、遇到的问题和解决目录一、环境Ubuntu18.04;ROS melodic;二、ROS melodic及Moveit的安装看了很多博文,建议参考这位博主。其中可能ROS工作空间catkin_make的时候会报错,参考这位博主。Moveit的下载参考官网,如果ROS版本不一样,替换melodic为相应版本。1、安装mov
2021-08-06 17:26:14
7968
13
原创 labelme_json_to_dataset批量处理,并设置输出路径。
一、找到json_to_dataset.py文件在…\Anaconda3\envs\python36\Lib\site-packages\labelme\cli下。二、修改原代码2.1 检测路径中以’.json’为后缀的文件 path = [] for root, dirs, files in os.walk(json_file): # 获取所有文件 for file in files: # 遍历所有文件名 if os.path.splite
2021-05-10 09:55:57
2341
原创 安装anaconda、tensorflow(cpu版)以及keras,pycharm设置
一、安装anaconda直接官网下载安装,https://www.anaconda.com/。之前没有安过python的,直接在安装过程中添加环境变量就行,下面两个选项都选,安装过的不选第一个,只选第二个。没有勾选第一个的,添加修改环境变量。之前安装过的python环境改为anaconda。我之前下载的是python3.9.0,装在prgram files里面,像下面一样修改。可以选择把之前下载的python卸载了,利用之前下的安装exe卸载,比较干净。二、安装tensflow和kera
2021-04-27 15:14:03
940
2
原创 pycharm输出中文出错-SyntaxError: Non-UTF-8 code starting with ‘\xca‘ in ××.py on line ×, but no encoding d
pycharm输出中文出错-SyntaxError: Non-UTF-8 code starting with '\xca' in ××.py on line ×, but no encoding declared一、全部改变编码格式二、单文件改变一、全部改变编码格式文件-设置-编辑器-文件编码,项目编码改为UTF-8。出现问题一般是因为这里是gbk你好! 这是你第一次使用 Markdown编辑器 所展示的欢迎页。如果你想学习如何使用Markdown编辑器, 可以仔细阅读这篇文章,了解一下Mark
2020-12-24 16:55:08
3746
1
翻译 MATLAB标定工具箱的使用_camera calibration for matlab
标定工具箱下载地址:http://www.vision.caltech.edu/bouguetj/calib_doc/download/index.html下载完成后解压到mtlab\toolbox路径下,并相应添加路径。在matlab命令窗口运行主calib_gui,屏幕上会出现一个模式选择窗口:两种操作模式:标准或内存有效。在标准模式下,所有用于校准的图像都会一次加载到内存中;内存有效模式下,每张图像都会一张一张地加载。选择模式后出现主校准工具箱窗口:下载示例图片并解压到TOOLBOX_c
2020-08-21 18:47:46
4158
1
Endnote X9.1 使用手册.pdf
2020-09-07
![]()
空空如也
TA创建的收藏夹 TA关注的收藏夹
TA关注的人