






 本文介绍了一个用Python编写的Camera参数计算工具,通过用户输入镜头焦距和传感器尺寸,计算并显示HFOV、VFOV和DFOV。使用Tkinter库设计了用户界面,允许用户验证FOV计算公式的准确性。
本文介绍了一个用Python编写的Camera参数计算工具,通过用户输入镜头焦距和传感器尺寸,计算并显示HFOV、VFOV和DFOV。使用Tkinter库设计了用户界面,允许用户验证FOV计算公式的准确性。
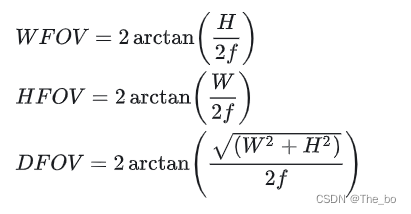
在Camera工作中,有时候我们会去了解一些Camera的参数,包括焦距、CCD/COMS Sensor的尺寸,以便了解该镜头的视场角(FOV)范围等信息,所以利用编程来计算FOV(HFOV、VFOV、DFOV),HFOV、VFOV、DFOV的计算公式:
制成一个小工具方便使用,话不多说,先看下UI效果:
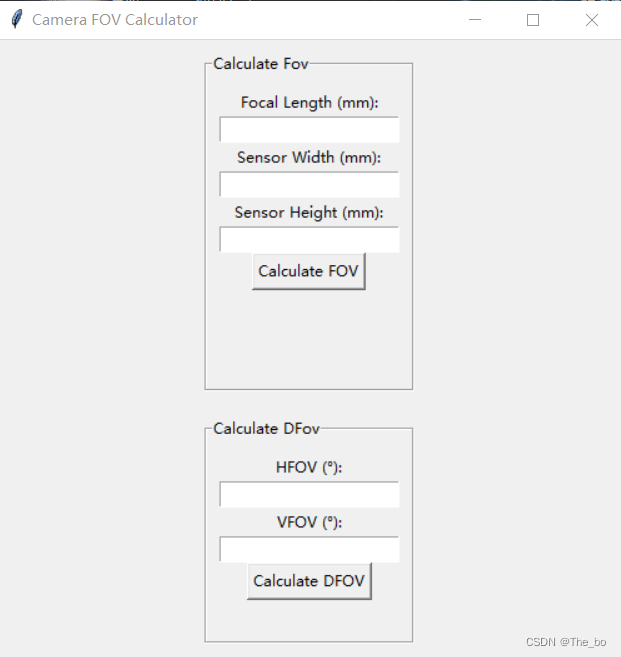
上面一栏主要是如果知道镜头的焦距以及sensor的尺寸情况计算,当然有时候我们可以自己利用仪器简单测出镜头的HFOV和VFOV,然后计算一下DFOV即可,DFOV与HFOV、VFOV的计算公式可由上面的计算公式推导出来:
看下计算结果:
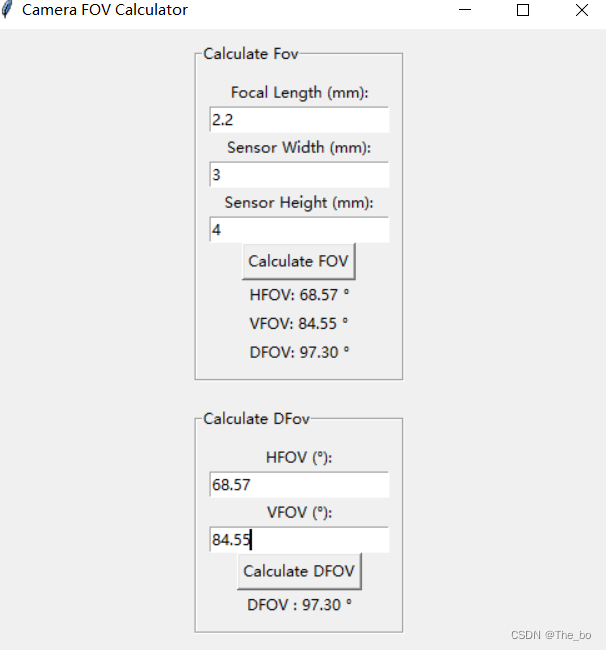
这边可以将上面由sensor信息计算出来的FOV填入来验证一下公式的准确性(一开始就是没注意,后来一检验发现公式有错误)。
完整代码:
import tkinter as tk
from tkinter import messagebox
import math
def calculate_fov():
try:
focal_length = float(entry_focal_length.get())
sensor_width = float(entry_sensor_width.get())
sensor_height = float(entry_sensor_height.get())
hfov = 2 * math.degrees(math.atan(sensor_width / (2 * focal_length)))
vfov = 2 * math.degrees(math.atan(sensor_height / (2 * focal_length)))
dfov = 2 * math.degrees(math.atan(math.sqrt(sensor_width**2 + sensor_height**2) / (2 * focal_length)))
label_hfov_result.config(text="HFOV: {:.2f} °".format(hfov))
label_vfov_result.config(text="VFOV: {:.2f} °".format(vfov))
label_dfov_result.config(text="DFOV: {:.2f} °".format(dfov))
except ValueError:
label_hfov_result.config(text="Invalid input!")
label_vfov_result.config(text="Invalid input!")
label_dfov_result.config(text="Invalid input!")
def calculate_dfov():
try:
hfov = float(entry_hfov.get())
vfov = float(entry_vfov.get())
hfov_rad = math.radians(hfov)
vfov_rad = math.radians(vfov)
tan_hfov = math.tan(0.5 * hfov_rad)
tan_vfov = math.tan(0.5 * vfov_rad)
dfov = 2 * math.degrees(math.atan(math.sqrt(tan_hfov**2 + tan_vfov**2)))
dfov_result.config(text="DFOV : {:.2f} °".format(dfov))
except ValueError:
messagebox.showerror("Invalid input!", "Please input valid numbers!")
# 创建主窗口
root = tk.Tk()
root.geometry("500x500")
root.title("Camera FOV Calculator")
# 创建输入框和标签
calc_fov =tk.LabelFrame(root, text="Calculate Fov",padx=10, pady=10)
calc_fov.pack(padx=10, pady=10)
label_focal_length = tk.Label(calc_fov, text="Focal Length (mm):")
label_focal_length.pack()
entry_focal_length = tk.Entry(calc_fov)
entry_focal_length.pack()
label_sensor_width = tk.Label(calc_fov, text="Sensor Width (mm):")
label_sensor_width.pack()
entry_sensor_width = tk.Entry(calc_fov)
entry_sensor_width.pack()
label_sensor_height = tk.Label(calc_fov, text="Sensor Height (mm):")
label_sensor_height.pack()
entry_sensor_height = tk.Entry(calc_fov)
entry_sensor_height.pack()
# 创建计算按钮
button_calculate = tk.Button(calc_fov, text="Calculate FOV", command=calculate_fov)
button_calculate.pack()
# 创建显示结果的标签
label_hfov_result = tk.Label(calc_fov, text="")
label_hfov_result.pack()
label_vfov_result = tk.Label(calc_fov, text="")
label_vfov_result.pack()
label_dfov_result = tk.Label(calc_fov, text="")
label_dfov_result.pack()
# 计算DFOV
calc_dfov =tk.LabelFrame(root, text="Calculate DFov",padx=10, pady=10)
calc_dfov.pack(padx=10, pady=10)
label_hfov = tk.Label(calc_dfov, text="HFOV (°):")
label_hfov.pack()
entry_hfov = tk.Entry(calc_dfov)
entry_hfov.pack()
label_vfov = tk.Label(calc_dfov, text="VFOV (°):")
label_vfov.pack()
entry_vfov = tk.Entry(calc_dfov)
entry_vfov.pack()
button_calculate = tk.Button(calc_dfov, text="Calculate DFOV", command=calculate_dfov)
button_calculate.pack()
dfov_result = tk.Label(calc_dfov, text="")
dfov_result.pack()
# 运行主循环
root.mainloop()
















 3126
3126

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









