







1、非线性操作:
输入如下:
import torch
import torchvision.datasets
from torch import nn
from torch.nn import ReLU, Sigmoid
from torch.utils.data import DataLoader
from torch.utils.tensorboard import SummaryWriter
input = torch.tensor([[1, -0.5],
[-1, 3]])
input = torch.reshape(input, (-1,1,2,2))
print(input.shape)形状如下:

2、 定义网络:
dataset = torchvision.datasets.CIFAR10('dataset', train=False, transform=torchvision.transforms.ToTensor(), download=True)
dataloader = DataLoader(dataset, batch_size=64)
class Tudui(nn.Module):
def __init__(self):
super(Tudui, self).__init__()
self.relu1 = ReLU()
self.sigmoid1 = Sigmoid()
def forward(self, input):
# output = self.relu1(input)
output = self.sigmoid1(input)
return output3、调用神经网络:
tudui = Tudui()
output = tudui(input)
print(output)结果如下:

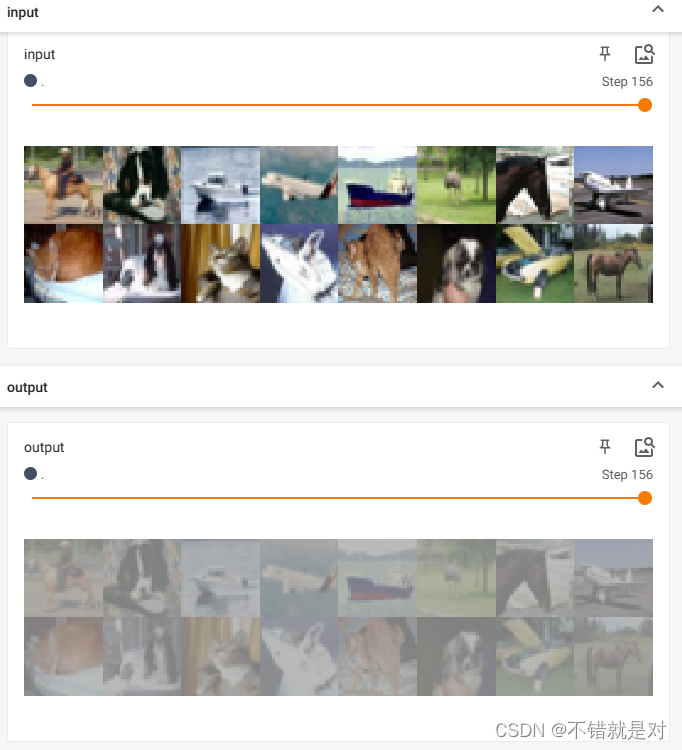
4、在现实数据集中使用非线性层:
代码如下:
writer = SummaryWriter('logs_relu')
step = 0
for data in dataloader:
imgs, targets = data
writer.add_images('input', imgs, step)
output = tudui(imgs)
writer.add_images('output', output, step)
step += 1
writer.close()结果如下:
















 1277
1277











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











