






2.4.3 炮管
关于炮管角度转换的理解:

先直接将相机的x欧拉角赋值给gun,得到一个未经修正的角度,再通过判断本地坐标系的数值是否超出范围,对这个角度进行约束。

如果按照书上说法事先旋转过gun的z轴使其和炮管同一指向,则会出错。
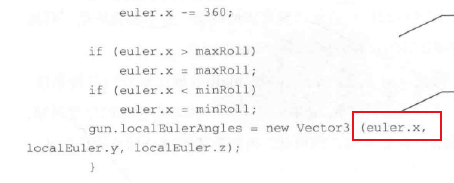
需要将红框中的代码改成 euler.x + 87.8(即你将gun转过的角度,书上默认是0°的地方现在是87.8°)。
并在![]() 之前加上一句 euler.x -= gunManualRotate;。
之前加上一句 euler.x -= gunManualRotate;。

2.4.3 炮管
关于炮管角度转换的理解:
先直接将相机的x欧拉角赋值给gun,得到一个未经修正的角度,再通过判断本地坐标系的数值是否超出范围,对这个角度进行约束。
如果按照书上说法事先旋转过gun的z轴使其和炮管同一指向,则会出错。
需要将红框中的代码改成 euler.x + 87.8(即你将gun转过的角度,书上默认是0°的地方现在是87.8°)。
并在![]() 之前加上一句 euler.x -= gunManualRotate;。
之前加上一句 euler.x -= gunManualRotate;。











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 1万+
1万+





