



在工业自动化系统中,协议多样性带来的通信壁垒始终是系统集成的核心挑战。意大利ADFweb凭借其DeviceNet协议网关系列,为复杂工业网络提供了高效、灵活的解决方案。从DeviceNet与CANopen、Modbus、PROFINET、SAE J1939等协议的互转,到极端环境下的稳定运行,网关以模块化设计、多协议兼容性和工业级可靠性,成为智能制造与设备升级的关键纽带。本文将深度解析其技术优势、核心型号及应用场景,助您实现跨协议设备的无缝互联。

一、ADFweb DeviceNet网关系列:覆盖全场景的协议转换专家
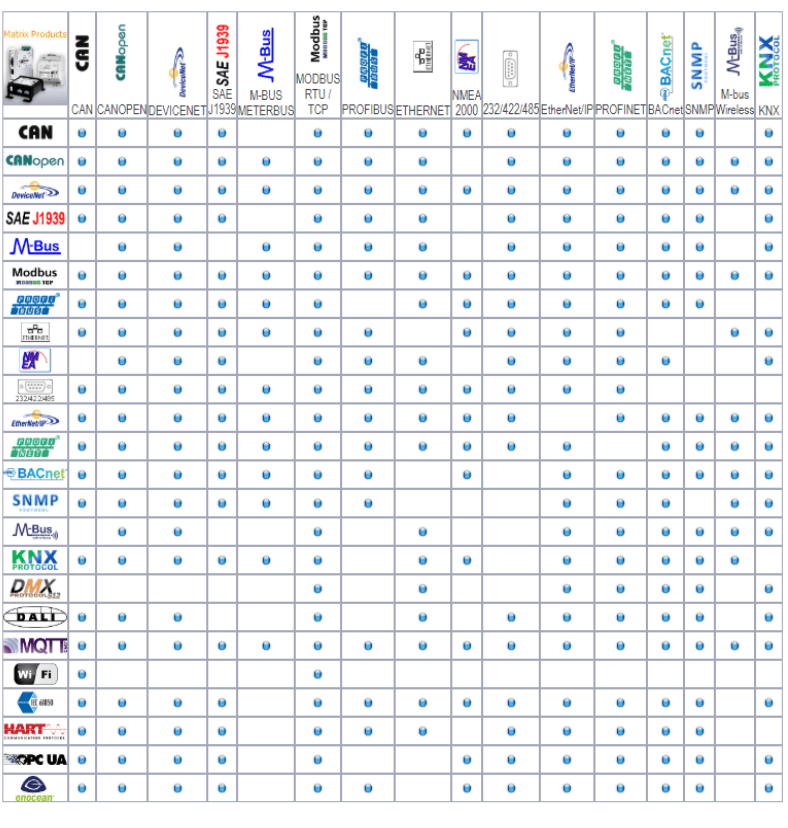
ADFweb DeviceNet网关系列专为工业通信协议转换设计,支持与主流工业总线及设备协议的高效对接,具体型号及功能如下:
HD67608/HD67609系列
- PROFINET与DeviceNet互转:HD67608-A1(主机型)支持PROFINET控制器读写DeviceNet从站;HD67609-A1(从机型)实现DeviceNet主站与PROFINET网络集成,适用于西门子PLC与DeviceNet设备的高效协同[citation:历史对话]。
- 双以太网端口设计,无需额外交换机,简化布线[citation:历史对话]。
HD67136
- CANopen转DeviceNet:支持双向协议转换,自动生成EDS文档,适用于需要整合CANopen设备至DeviceNet网络的场景,如电机控制与传感器网络。
- 宽温支持(-30°C至70°C)与DIN导轨安装,适配严苛工业环境。
HD67151
- DeviceNet主站转Modbus从站:连接DeviceNet从设备(如传感器、执行器)与Modbus主站(如 PLC或HMI),支持RS232/485接口,兼容多种工业控制器。
- 灵活供电(8-35VDC),适用于分布式控制场景。
HD67134
- CANopen与DeviceNet从站互转:支持双向SDO/PDO数据读写,适用于需要设备级诊断与实时控制的系统,如智能仓储与物流自动化。
HD67137
- DeviceNet转SAE J1939:专为车辆与工程机械设计,支持CAT、Volvo等发动机数据接入PLC,实现车队管理与远程监控。
二、核心技术优势:工业级性能与智能化设计
1. 多协议兼容性
- ADFweb网关支持DeviceNet与PROFINET、CANopen、Modbus、SAE J1939等协议的无缝转换,打破设备间通信壁垒,减少系统改造成本。
2. 极端环境适应性
- 宽温工作范围:多数型号支持-40°C至85°C(如HD67608/HD67609、HD67134),适用于冶金、石化等高温或户外场景[citation:历史对话]。
- 电气隔离与抗干扰设计:确保信号稳定传输,防止电磁干扰导致的数据丢失。
3. 即插即用与快速配置
- 自动生成EDS文件(如HD67136、HD67137),简化设备集成流程。
- 配套配置软件(如SW67120、SW67137),支持参数可视化设置与数据映射,缩短调试周期。
4. 模块化与灵活部署
- DIN导轨安装:节省控制柜空间,支持高密度部署。
- 多样化接口:提供接线端子、M12、Mini连接器选项,适配不同工业设备需求。
三、应用场景:赋能工业4.0与智能化升级
1. 智能制造
- 通过HD67608/HD67609实现西门子PLC与DeviceNet传感器网络的数据交互,提升生产线自动化水平[citation:历史对话]。
2. 工程机械与车辆管理
- 利用HD67137将J1939协议发动机数据接入中央控制系统,优化车队能效与维护计划。
3. 能源与过程控制
- 采用HD67151整合Modbus仪表与DeviceNet网络,实时监控电力或化工生产中的关键参数。
4. 设备兼容性升级
- 使用HD67136保留旧有CANopen设备,无缝接入新一代DeviceNet网络,延长设备生命周期。
四、为何选择ADFweb DeviceNet网关?
- 高性价比:相比同类产品,ADFweb网关通过简化布线(如双以太网端口设计)与即插即用功能,降低总拥有成本(TCO)30%以上[citation:历史对话]。
- 全生命周期支持:提供固件升级与定制化服务,适配未来协议扩展需求。
- 全球认证与可靠性:符合工业EMC标准(如EN 61000-6-2),通过严苛环境测试,保障长期稳定运行。
意大利ADFweb DeviceNet网关系列以其多协议融合能力、工业级可靠性及智能化配置,成为工业自动化领域不可或缺的通信枢纽。无论是新建智能工厂的规划,还是传统产线的数字化转型,ADFweb都能以极简架构、极致性能助您打通设备链路,释放协同潜力。联系广州智维电子科技有限公司,获取定制化解决方案,开启高效互联新篇章!

















 5万+
5万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









