







 本文介绍了一种基于STM32单片机和RC522模块的门禁系统设计,系统通过RFID卡信息管理、门禁系统安全控制和门锁控制,实现用户身份验证和门锁开关。实验结果证明该系统安全可靠,适用于多种场合。
本文介绍了一种基于STM32单片机和RC522模块的门禁系统设计,系统通过RFID卡信息管理、门禁系统安全控制和门锁控制,实现用户身份验证和门锁开关。实验结果证明该系统安全可靠,适用于多种场合。
一、项目背景
门禁系统是现代社会中非常重要的安全控制系统之一,其功能是在保障建筑物安全的同时,为合法用户提供便利。当前设计一种基于STM32+RC522的门禁系统设计方案,通过RFID-RC522模块实现了对用户卡的注册、识别及身份验证,通过控制SG90舵机实现门锁的开关,具有较高的安全性和可靠性。实验结果表明,该门禁系统可以有效地保障建筑物的安全性。
门禁系统广泛应用于各种建筑物、企事业单位,用于管理人员的进出、控制人员活动范围、实现安全监控等功能。传统的门禁系统采用密码输入或刷卡的方式进行身份验证,但存在易被破解的风险。基于RFID的门禁系统已经成为一种相对先进的安全控制方案。
本次设计的STM32+RC522门禁系统,通过RFID-RC522模块对用户的卡进行注册、识别完成身份识别,对门锁进行开关。系统带了OLED显示屏,输入用户密码登录之后,可以对新卡片进行注册,添加新卡片,对不使用的卡片进行注销。在系统里,IC卡的数据都存储在卡的内部扇区里,通过卡的内部空间进行管理。
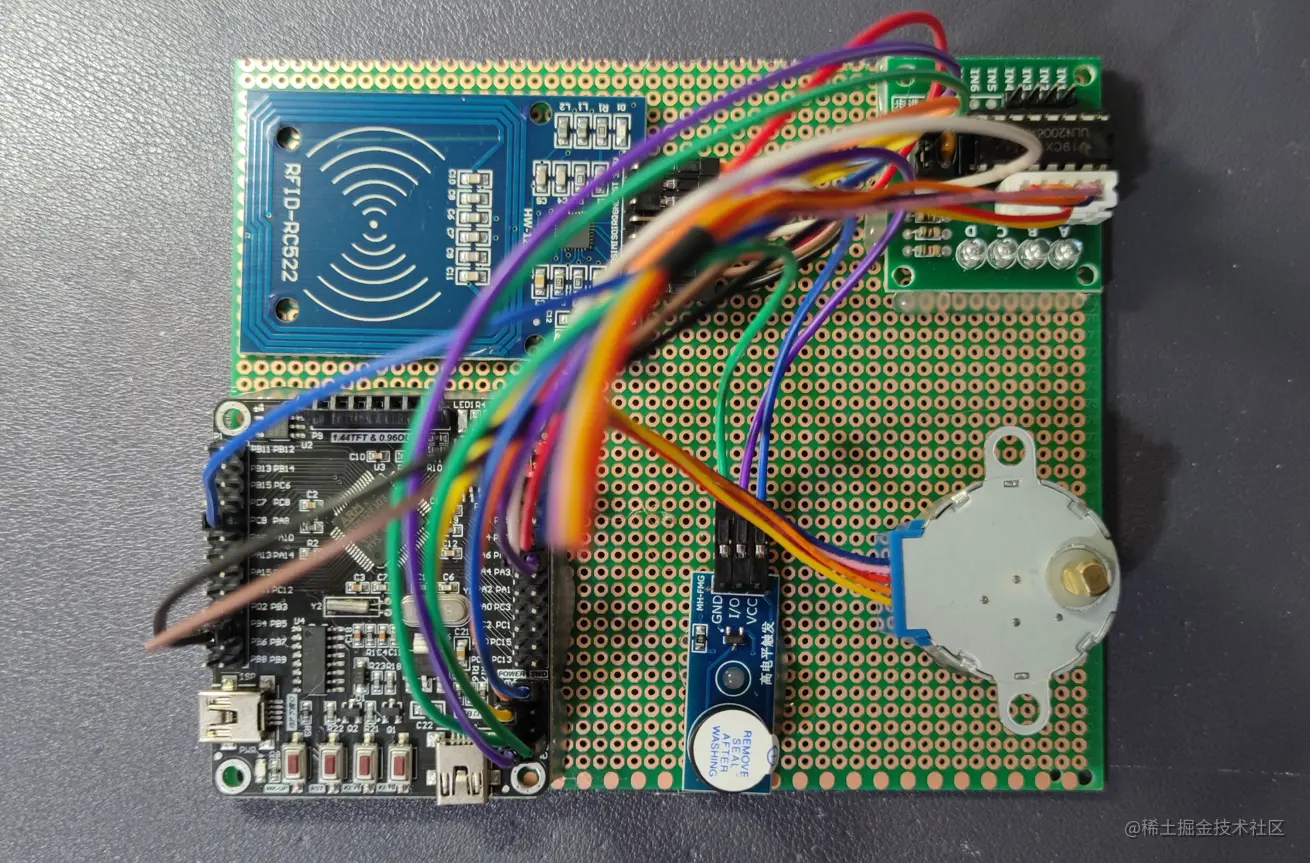
采用5V-步进电机的版本:
二、系统设计
门禁系统由STM32F103C8T6单片机、RFID-RC522模块、SG90舵机、LCD1602液晶显示屏、键盘模块等组成。其中,STM32F103C8T6单片机作为系统的核心控制器,控制程序的执行;RFID-RC522模块作为识别用户卡片的设备;SG90舵机作为门锁控制设备;OLED显示屏提供用户输入信息和系统信息的显示;键盘模块方便用户进行密码和卡片信息的输入。
2.1 软件设计
【1】RFID卡信息管理
本系统采用卡的内部空间进行IC卡信息的管理。每个IC卡可以分为多个扇区,每个扇区包含多个块,每个块包含16个字节。扇区0是厂家已经预留好的,用于存储卡片的序列号,扇区1-15可以由用户自己配置,用于存储一些私有数据,如用户身份、车牌号、员工编号等。
在本系统中,IC卡信息的管理主要包括三个方面:新卡片注册、卡片识别和注销卡片。
对于新卡片的注册,用户需要按下键盘上的“#”键进入注册模式,接着输入管理员密码,然后将新卡放到RFID读写器上,系统将读取卡片序列号,并在卡片的扇区中存储用户名和密码信息等。
对于卡片的识别,当用户按下门禁系统的确认键时,系统将读取RFID模块中读取的卡片序列号,并去卡片扇区中查询用户名和密码信息,进行身份验证。如果卡片识别成功,系统将控制舵机旋转一圈实现开锁功能。
对于注销卡片,管理员需要输入密码进行身份验证后,再将要注销的卡片放到RFID读写器上,系统将清空该卡片的扇区内所有数据。
【2】门禁系统安全控制
本门禁系统采用密码验证和卡片识别相结合的方式,提高了系统的安全性。具体来说,系统要求用户输入密码或刷卡进行身份验证,只有在验证成功后才能控制门锁进行开关操作。同时,系统还可以记录每一次开启门锁的时间和用户信息,以便管理员进行安全监控。
【3】门锁控制
本门禁系统采用SG90舵机控制门锁的开关,具有结构简单,控制方便的优点。在门锁控制过程中,系统对舵机控制信号的频率和占空比进行精细控制,以实现门锁的准确开关。
2.2 硬件设计
【1】STM32F103C8T6单片机
STM32F103C8T6单片机是ST公司推出的一款基于Cortex-M3内核的可编程32位单片机,常常被广泛应用于工业控制、智能家居、嵌入式控制等领域。

它的主要特点包括:
arduino
复制代码
1. Cortex-M3内核:STM32F103C8T6使用Cortex-M3内核,具有高性能、低功耗、硬实时等特点,可支持多个串口、I2C、SPI、USB等外设,为使用者带来更大的灵活性。 2. 32位处理能力:STM32F103C8T6是一款32位单片机,具有比8位、16位单片机更高的数据运算能力、编程灵活度和计算精度。 3. 较强的系统时间管理能力:STM32F103C8T6内部具备RTC实时时钟模块,可实现精准的时间管理和时间标记功能,在一些需要时间同步的应用场景下具有较大的优势。 4. 大存储容量:STM32F103C8T6内置64K字节的闪存和20K字节的SRAM,能够满足大型嵌入式应用的存储需求。 5. 丰富的外设接口:STM32F103C8T6支持多个外设接口,如SPI、I2C、CAN总线等,方便开发者扩展相关应用场景。 6. 代码可移植性强:由于该芯片应用广泛,可以使用多种开发工具进行开发,例如Keil、STM32CubeMX等,而且支持多种编程语言,如C语言、C++等,因此优点很容易在不同的平台、不同开发者之间实现代码的移植。
【2】RFID-RC522模块
RFID-RC522模块是一种低成本、高性价比的RFID读写模块。它具有高精度、快速读取等特点,广泛应用于门禁系统、智能卡管理、物流追踪等领域。

RFID-RC522模块的特点如下:
arduino
复制代码
1. 高精度:RFID-RC522模块采用射频感应技术进行信号传输和读写,具有高精度、稳定性强等优点。 2. 快速读取:RFID-RC522模块读取速度快,一般只需0.1秒左右就可以完成读取操作。 3. 支持多种协议:RFID-RC522模块支持ISO14443A/B、FeliCa等多种RFID协议,可满足不同应用场合的需求。 4. 低功耗:RFID-RC522模块功耗低,工作电流为13-26mA,待机电流为10A。 5. 接口简单:RFID-RC522模块采用SPI接口进行通信,模块上的引脚有7个,具有很好的兼容性。 6. 支持多种开发语言:RFID-RC522模块支持多种开发语言,如C++、Python等,方便开发者进行二次开发。
RFID-RC522模块的使用需要配合相关的库文件,在Arduino、Raspberry Pi等开发板上进行代码编写和开发。常见的使用场景包括门禁系统、智能卡管理、出入库管理、物流追踪等领域。
【3】SG90舵机
该舵机小巧耐用,可以精确地控制门锁的开关。
SG90舵机是一种小型舵机,体积小、重量轻、价格低廉,常常被用于模型飞机、小型机械臂、玩具模型等领域。它采用了直流电机,利用PID控制技术,以及精密的小齿轮减速箱实现转向角的控制。

SG90舵机的特点如下:
复制代码
1. 小体积:SG90舵机体积为23mm * 12.2mm * 29mm,重量仅为9g,非常适合小型电子设备。 2. 高精度:SG90舵机的控制精度比较高,可控制角度范围为0 ~ 180度,分辨率为1度,可以实现精确到角度的控制。 3. 低噪音:SG90舵机采用了精密减速齿轮箱,转动非常平稳,并且噪音非常低。 4. 低功耗:SG90舵机的电机非常省电,一般使用3V到6V的电源,仅需20 mA的电流,可大大节省电力消耗。 5. 价格适中:SG90舵机价格相对较低,非常适合初学者或需求量较大的用户使用
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 3984
3984

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









