






从零学习自动驾驶Lattice规划算法(下) 轨迹采样 轨迹评估 碰撞检测
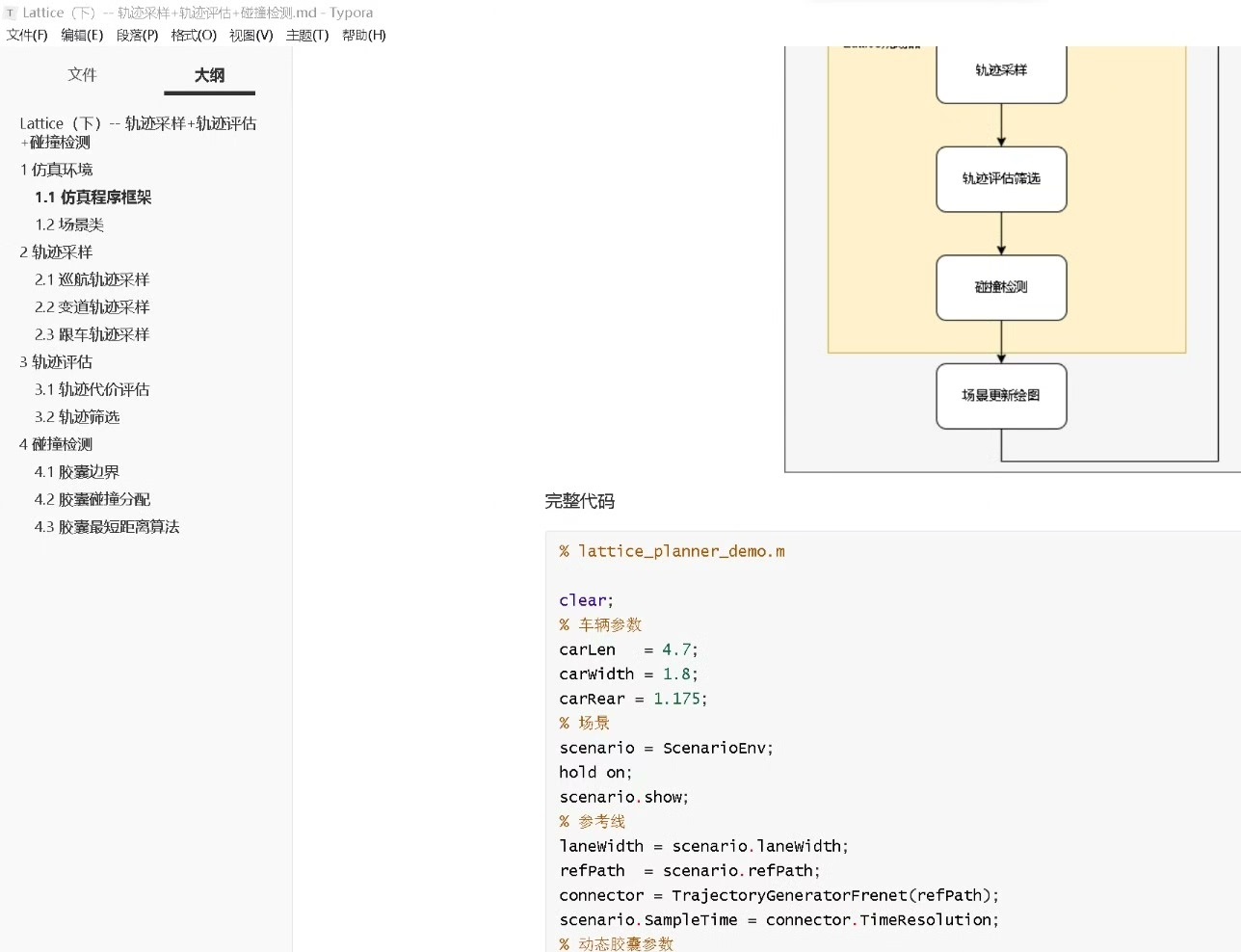
包含matlab代码实现和cpp代码实现,方便对照学习。
cpp代码用vs2019编译 依赖qt5.15做可视化
更新:
1 优化绘图
2 增加轨迹预测模块
3 增加从mat文件加载场景的功能,方便场景自定义
ID:59136768138020343
魔灵星自主的芥兰

标题:从零学习自动驾驶Lattice规划算法(下):轨迹采样、轨迹评估和碰撞检测
摘要:
本文将深入探讨自动驾驶领域中的Lattice规划算法,着重介绍了轨迹采样、轨迹评估以及碰撞检测等关键概念。通过对matlab代码和cpp代码的对比分析,读者可以更加全面地理解该算法的实现原理,并利用vs2019编译cpp代码,以qt5.15进行可视化展示。此外,本文还对绘图优化、轨迹预测模块的增加以及从mat文件加载场景的功能进行了更新介绍,以便于读者对场景进行自定义。
关键词:自动驾驶、Lattice规划算法、轨迹采样、轨迹评估、碰撞检测、matlab代码、cpp代码、可视化、绘图优化、轨迹预测、场景自定义
引言
自动驾驶技术的发展为交通领域带来了革命性的变化。在自动驾驶系统中,规划算法起着至关重要的作用。本文将继续深入探讨自动驾驶领域中的Lattice规划算法,着重介绍了轨迹采样、轨迹评估以及碰撞检测等关键概念,并给出了matlab代码和cpp代码的实现示例,以方便读者学习和对比。
一、轨迹采样
1.1 采样空间定义
Lattice规划算法中的轨迹采样是基于采样空间进行的。本节将详细介绍采样空间的定义和选择原则,并给出了相应的代码实现。
1.2 采样策略及优化
除了采样空间的选择外,采样策略也是影响算法性能的重要因素。本节将从均匀采样、高斯采样等角度对采样策略进行分析,并提出了一些优化方法,以提高采样的效率和准确性。
二、轨迹评估
2.1 轨迹评估指标
为了对生成的候选轨迹进行评估和排序,本节将介绍常用的轨迹评估指标,包括舒适性、安全性、效率等,并给出了相应的评估方法。
2.2 评估算法实现与性能优化
在实际应用中,轨迹评估算法的实现和性能
以上相关代码,程序地址:http://wekup.cn/768138020343.html















 456
456











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









