






从零学自动驾驶lattice规划(上)--参考线,frenet标架,多项式拟合
算法详细文档说明。
2种代码实现:matlab和c++
ID:6999692698493308
autorobot

自动驾驶技术作为当前热门的领域之一,引起了广泛的关注和研究。作为实现自动驾驶的核心技术之一,路径规划在整个自动驾驶过程中起着至关重要的作用。本文将详细介绍一种从零开始学习自动驾驶lattice规划的方法,并讨论其中涉及的关键概念和算法,以及使用Matlab和C++两种语言实现的具体代码。
文章将以参考线、Frenet标架和多项式拟合为主要内容进行阐述。
一、参考线
在路径规划中,参考线是指一条平滑连续的曲线,它描述了车辆在特定位置和特定时间的理想轨迹。参考线的生成可以通过多种方法实现,例如基于离散点的插值法、生成最优参考线的优化算法等。
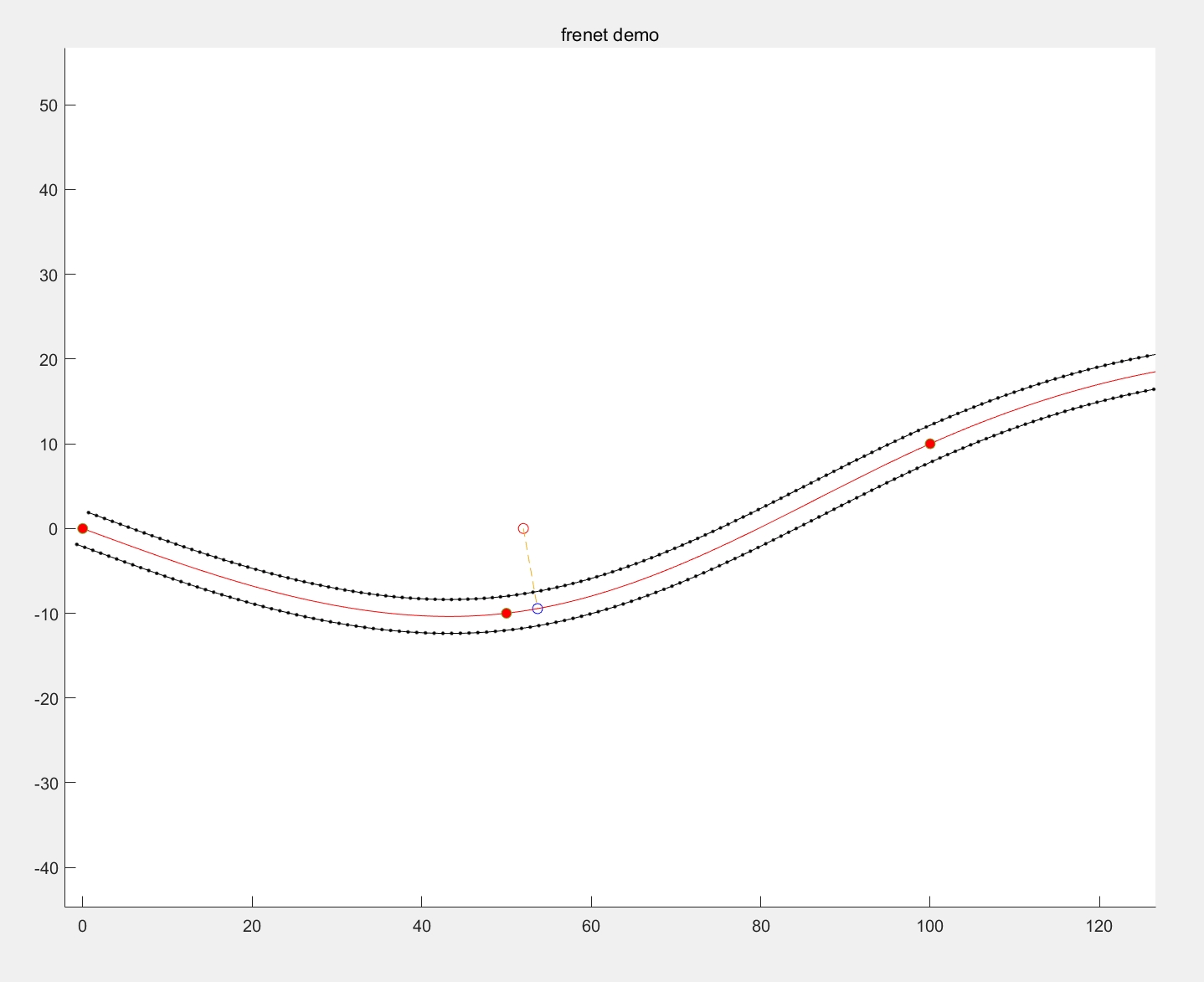
二、Frenet标架
Frenet标架是一种常用的描述车辆运动的坐标系,它以车辆所在位置、朝向角和曲率为基础,提供了一种更直观的车辆状态表示方式。Frenet标架可以有效地将车辆运动转化为坐标系上的状态变量,从而简化路径规划问题。
三、多项式拟合
多项式拟合作为路径规划中常用的方法之一,可以通过拟合一条平滑的曲线来实现路径的规划。在多项式拟合过程中,一般采用最小二乘法来求解拟合多项式的系数,从而使得拟合曲线与参考线尽可能接近。
在以上三个关键概念的基础上,我们将详细介绍自动驾驶lattice规划的算法流程,并提供Matlab和C++两种语言的代码实现。
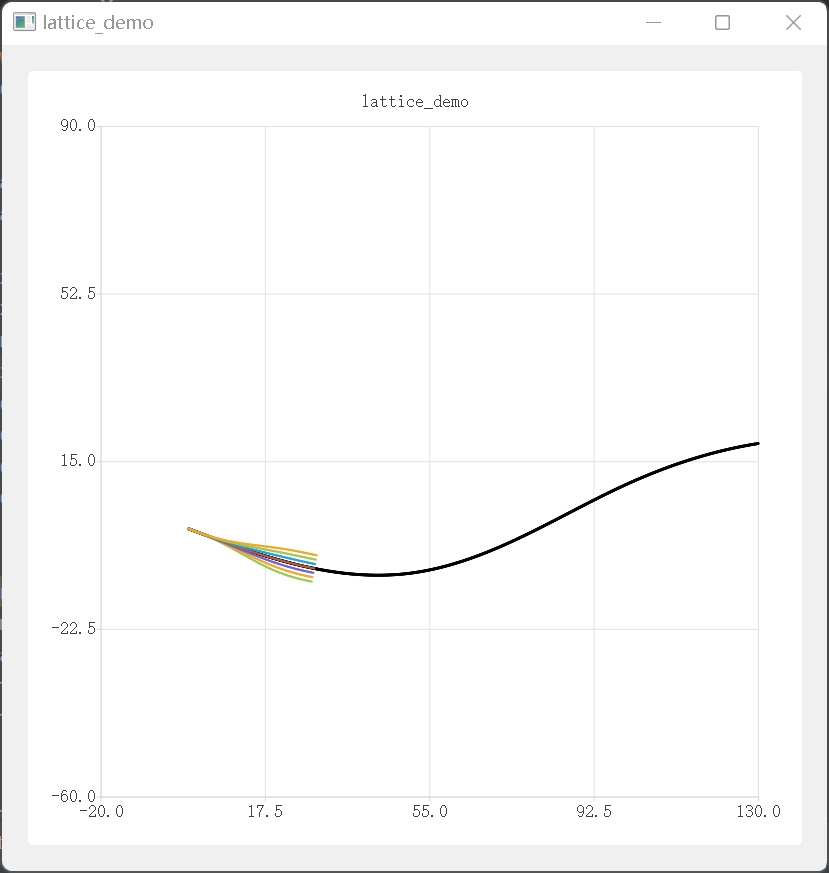
首先,我们将介绍Matlab的实现方法。在Matlab中,可以利用其强大的数学计算功能和图形化界面来实现自动驾驶lattice规划算法。具体实现过程可分为以下几个步骤:
- 读取车辆状态信息和参考线数据;
- 构建Frenet标架,将车辆状态信息转换为Frenet坐标系下的状态变量;
- 利用多项式拟合方法拟合参考线,得到平滑的曲线;
- 根据车辆动力学约束和路径规划目标,生成候选路径集合;
- 对每条候选路径进行评估和选择,选择最佳路径作为最终规划路径;
- 最后,利用Matlab的图形化界面将规划路径可视化。
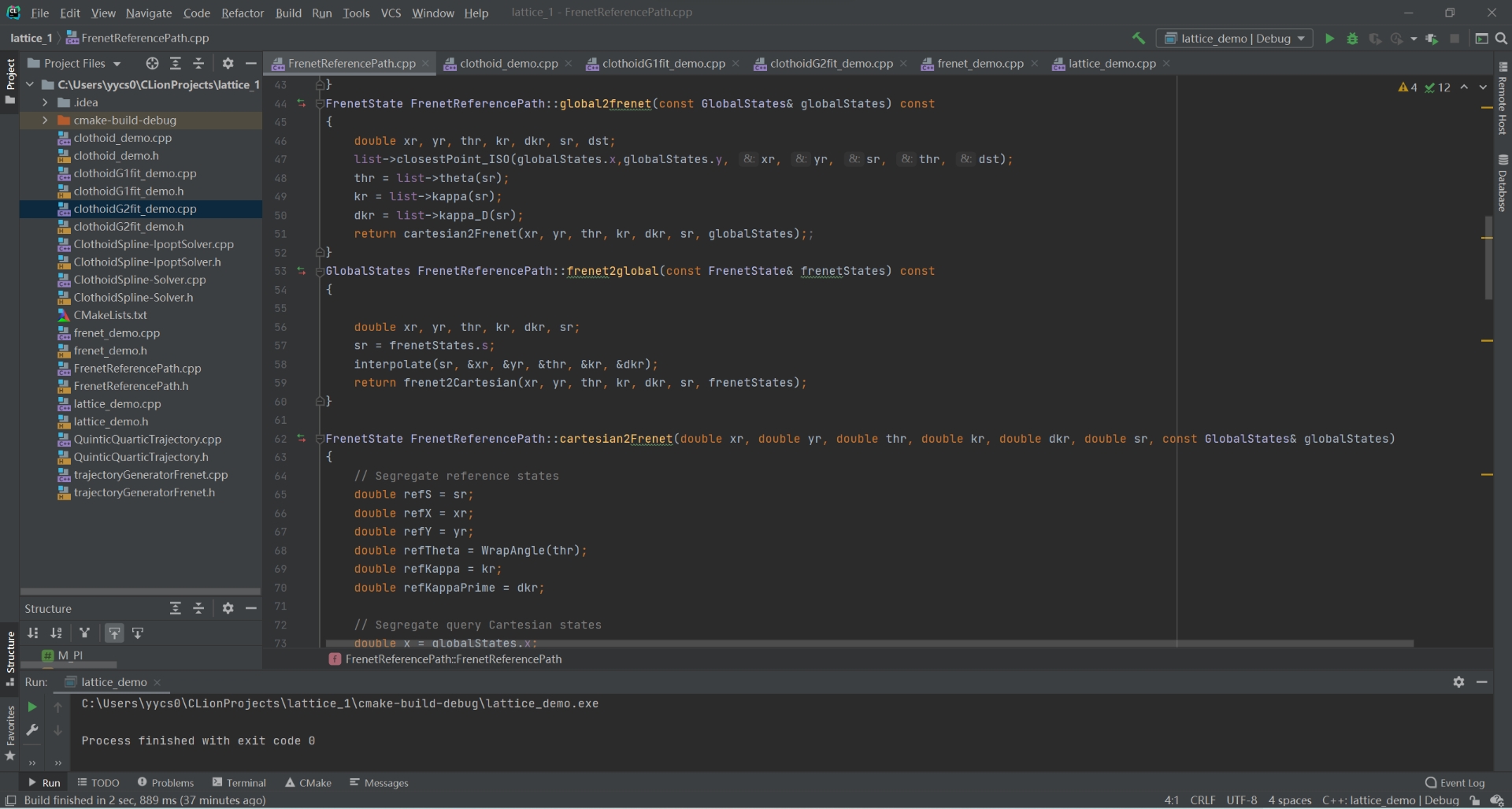
其次,我们将介绍C++的实现方法。C++作为一种高效的编程语言,可以提供更好的性能和扩展性。在C++中,可以使用一些常用的数学库和图形库来实现自动驾驶lattice规划算法。具体实现过程可分为以下几个步骤:
- 定义车辆状态结构体和参考线数据结构体;
- 实现Frenet标架转换函数,将车辆状态信息转换为Frenet坐标系下的状态变量;
- 利用多项式拟合方法实现参考线拟合函数,得到平滑的曲线;
- 根据车辆动力学约束和路径规划目标,实现候选路径生成函数;
- 实现路径评估和选择函数,选择最佳路径作为最终规划路径;
- 最后,通过图形库将规划路径可视化。
通过以上的描述,我们可以看出,从零学习自动驾驶lattice规划需要掌握参考线、Frenet标架和多项式拟合等关键概念和算法,并能够熟练运用Matlab和C++两种语言进行代码实现。当然,随着自动驾驶技术的不断发展和演进,路径规划算法也在不断改进和优化,我们在后续的文章中将继续探讨更多的内容。
总之,本文通过介绍从零学习自动驾驶lattice规划的方法,并结合参考线、Frenet标架和多项式拟合等关键概念和算法,提供了Matlab和C++两种语言的代码实现,希望对读者在自动驾驶技术研究和实践中有所帮助。未来,我们将不断探索和分享更多的自动驾驶技术内容,共同推动自动驾驶技术的发展和应用。
【相关代码 程序地址】: http://nodep.cn/692698493308.html















 555
555

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









