






西门子200smart运动控制四轴搬运取料机案例程序
该程序为两台smart plc通过通讯控制四轴伺服电机的搬运取料机案例工程案例程序。
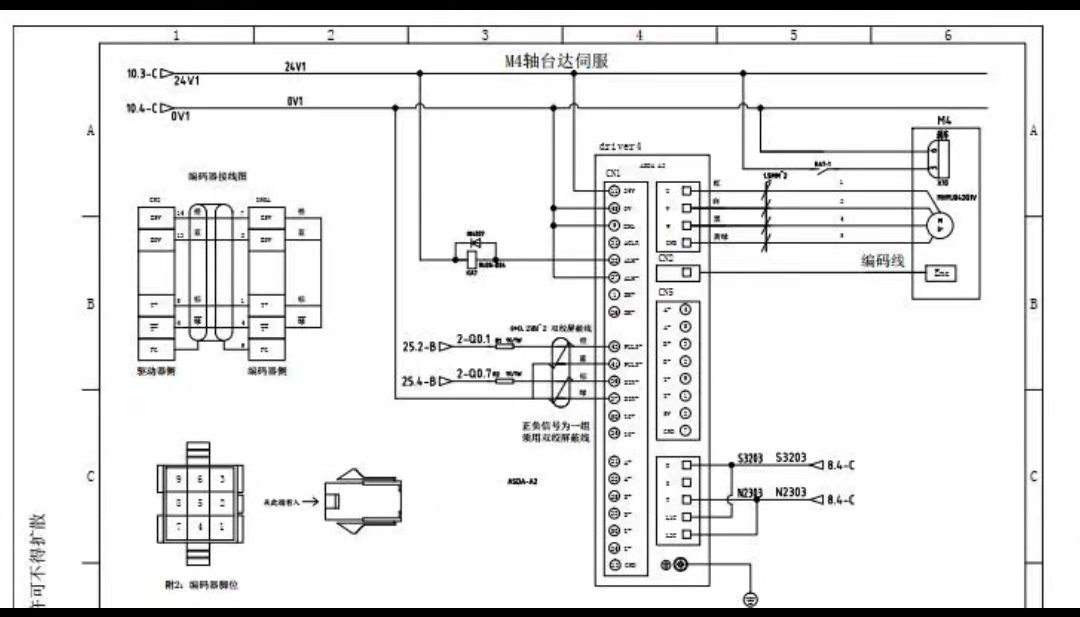
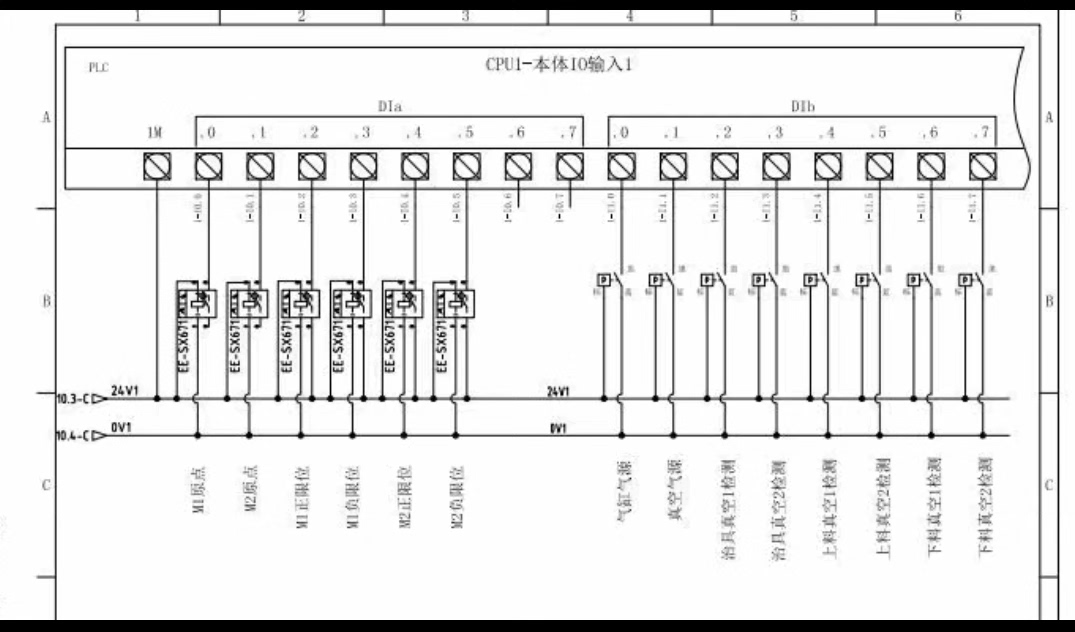
商品包含200smar_PLC程序+项目电气接线图(PDF图纸)+程序流程说明+触摸屏程序(步科)
程序包括伺服电机的启动,停止,原点定位,回归原点,位置控制以及方向控制。
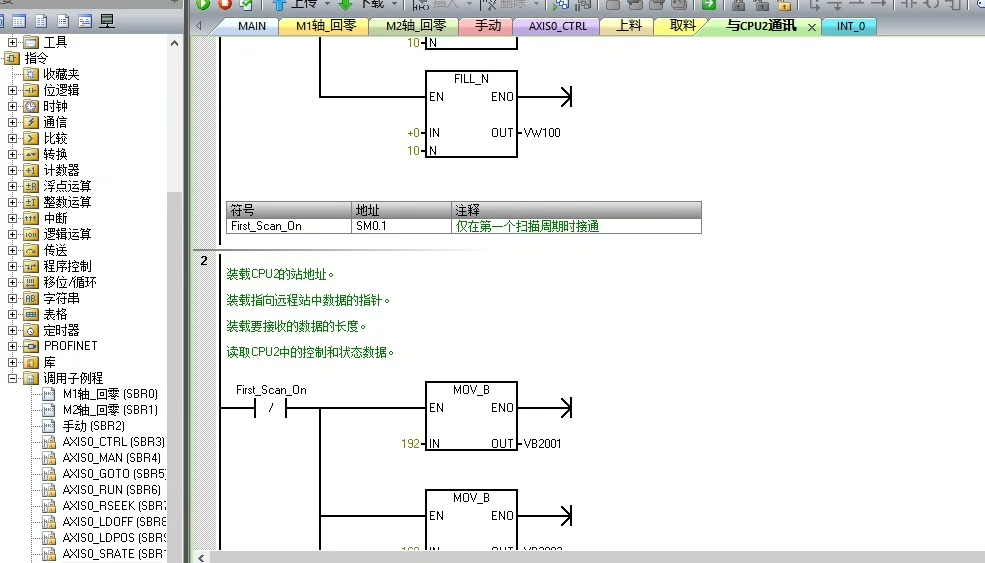
包括了所有控制伺服电机的指令,里面有指令的用法的详细解释和程序说明。
拿来就能用的案例程序,结合程序案例中学习,就会轻松快速的掌握。
让你从新手直接能做项目。
动作流程:
客户上好料盒,M1轴伺服跑到第一片料的位置,气缸将料推出到上位置,
M2轴在上料位置取件后移动到直线电机的,加工位置,m2轴上通过有上料下料的气缸,
用真空吸住料后m2轴移动到一个二维平台的加工位置,把带加工的料放到加工位置后,
激光器开始加工,加工完成后,通过M2轴把料取下,移动到成品放料位置,放料后,
M3轴将成品料推送到M4轴的料合第一层,完成后,m4轴移动到下一层的位置。
这是一个循环。
CPU1控制12轴/CPU2控制34轴
ID:429718675197073
配电柜自动化

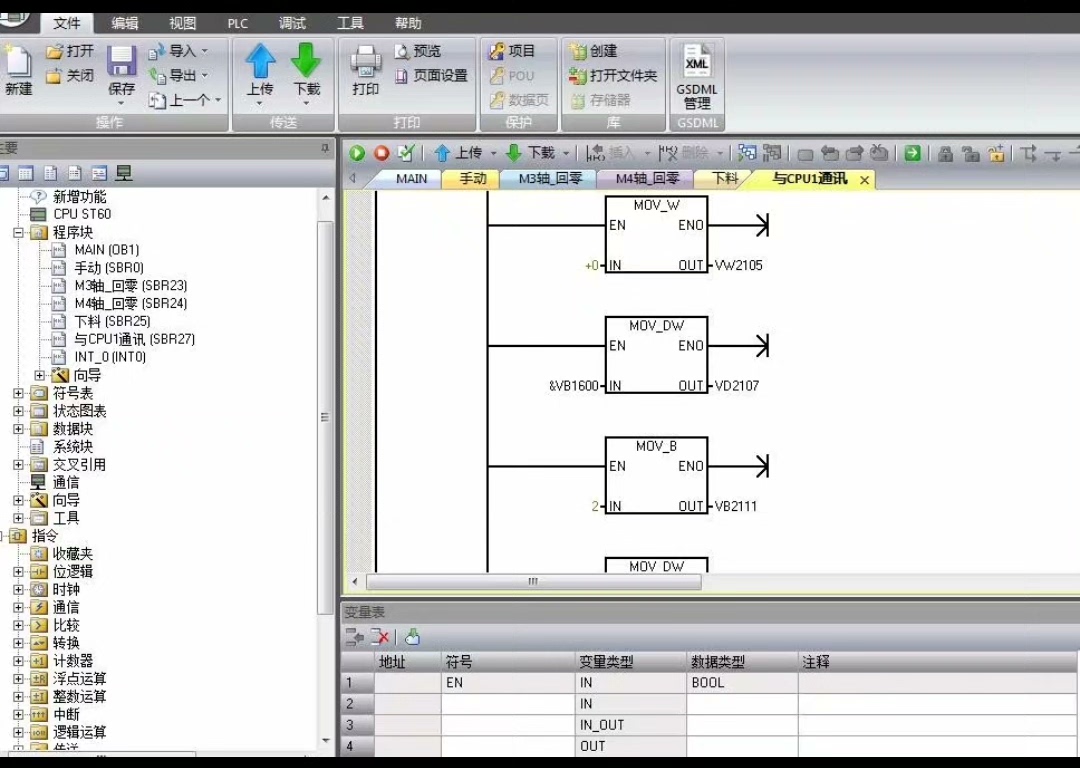


西门子200smart运动控制四轴搬运取料机是一个非常先进的程序案例工程,它通过两台smart PLC之间的通讯来控制四轴伺服电机的搬运取料机。该程序包括了伺服电机的启动、停止、原点定位、回归原点、位置控制以及方向控制等功能。通过这个程序案例,用户可以轻松快速地掌握控制伺服电机的技巧,从而能够直接应用到实际项目中。
在整个搬运取料的动作流程中,首先客户将好的料盒放置在指定位置,然后M1轴的伺服电机会移动到第一片料的位置,气缸将料推出到上方的位置。接下来,M2轴的伺服电机会移动到上料位置,并使用气缸将料吸附住,然后移动到直线电机的加工位置。通过一个二维平台的加工位置,将带有加工的料放置好后,激光器开始加工。加工完成后,M2轴的伺服电机将料取下,并移动到成品放料位置。再通过M3轴的伺服电机将成品料推送至M4轴的料合第一层,完成后,M4轴移动到下一层的位置。这个循环会一直进行下去。
整个系统中,CPU1控制12轴,而CPU2控制34轴。通过这样的分配,能够更好地实现对伺服电机的控制与协调,提高整个系统的效率和稳定性。
该程序案例不仅提供了实际操作中所需要的指令,还详细解释了这些指令的用法和程序的说明。因此,用户可以直接使用这个案例程序,结合案例中的学习,快速掌握相关技术,从而能够从一个新手直接转变为能够独立完成项目的技术人员。
通过西门子200smart运动控制四轴搬运取料机案例程序,我们可以看到它的应用范围非常广泛。无论是在工业生产中还是在机器人领域,都可以通过这个案例程序来实现自动化生产,提高生产效率,并减少人工操作的误差。
在应用这个案例程序时,我们需要注意以下几点。首先,确保PLC之间的通讯正常,这是整个系统能够正常工作的基础。其次,对于伺服电机的调试和运行,需要根据实际情况进行参数设置和调整,以确保其运行的稳定性和精度。此外,在整个搬运取料的过程中,还需要考虑安全性和可靠性,例如在料盒放置和移动过程中,需要设置相应的保护装置,以避免误操作和意外发生。
综上所述,西门子200smart运动控制四轴搬运取料机案例程序是一个非常实用的技术工程,通过这个案例程序,可以帮助用户快速掌握伺服电机的控制技术,从而能够在实际项目中灵活应用。通过合理的参数设置和调试,可以实现自动化生产,提高生产效率,降低成本。同时,在实际应用中,需要注意安全性和可靠性,确保整个系统能够稳定运行。相信通过这个案例程序,用户可以成为一个技术大师,能够独立完成各种项目的开发和控制。
以上相关代码,程序地址:http://wekup.cn/718675197073.html















 6557
6557











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









