







 超级会员免费看
超级会员免费看
 本文介绍了使用西门子S7-200SMART PLC控制三轴机械手进行上料过程的编程方法。通过运动控制向导设置X、Y、Z轴,详细阐述了脉冲配置、限位安全、原点校正和加减速时间等关键步骤,强调了实际应用中的位置计算与安全考虑。最后,提到了生成的程序块和后续的流程代码编写。
本文介绍了使用西门子S7-200SMART PLC控制三轴机械手进行上料过程的编程方法。通过运动控制向导设置X、Y、Z轴,详细阐述了脉冲配置、限位安全、原点校正和加减速时间等关键步骤,强调了实际应用中的位置计算与安全考虑。最后,提到了生成的程序块和后续的流程代码编写。
今天我们开始讨论一下控制三轴机械手上料的过程,
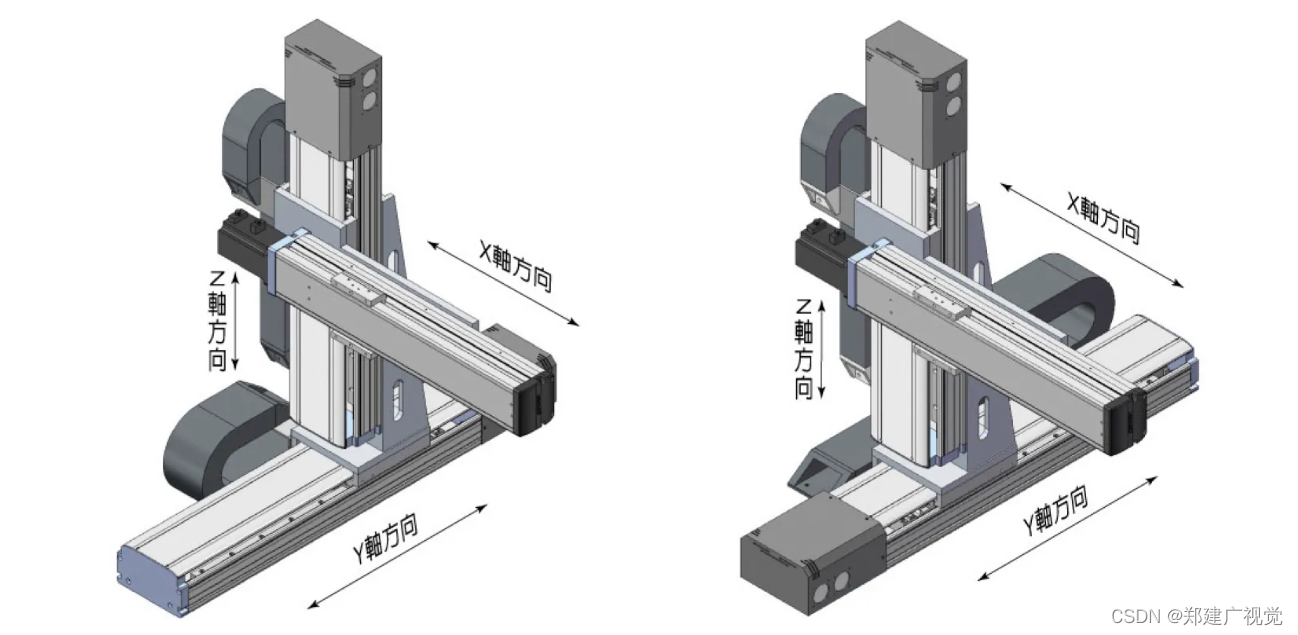
如上图所示,我们控制X轴,Y轴和Z轴运动,
我们有三个按钮,分别控制为停止,复位和启动;
上电后,我们复位所有轴,即回零所有轴;
回零后,我们点击启动按钮,伺服到达工作位,等待2秒后,伺服到达上料位,等待3秒后伺服到达下料位,等待2秒后伺服回到工作位,然后循环执行一直等到按下停止按钮结束。
我们来编写这样一个场景的程序。
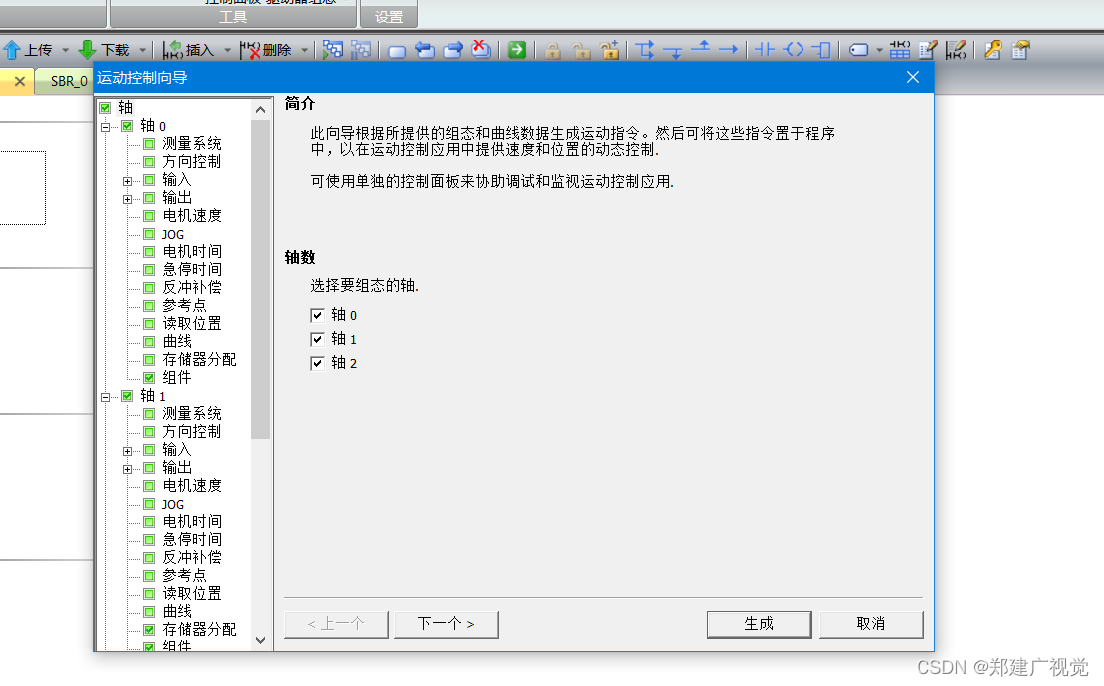
打开运动控制向导,三个轴全部勾选,这里需要注意PLC的型号,有些PLC的型号是不支持三个轴的,具体参考选型手册
今天我们开始讨论一下控制三轴机械手上料的过程,
如上图所示,我们控制X轴,Y轴和Z轴运动,
我们有三个按钮,分别控制为停止,复位和启动;
上电后,我们复位所有轴,即回零所有轴;
回零后,我们点击启动按钮,伺服到达工作位,等待2秒后,伺服到达上料位,等待3秒后伺服到达下料位,等待2秒后伺服回到工作位,然后循环执行一直等到按下停止按钮结束。
我们来编写这样一个场景的程序。
打开运动控制向导,三个轴全部勾选,这里需要注意PLC的型号,有些PLC的型号是不支持三个轴的,具体参考选型手册
 2255
2255

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文


























