






 本文介绍了一种改进的人工鱼群算法,通过自适应视野和启发选择机制优化机器人、无人机等的路径规划。MATLAB实现的实验结果显示了算法在复杂环境中的有效性和稳定性。
本文介绍了一种改进的人工鱼群算法,通过自适应视野和启发选择机制优化机器人、无人机等的路径规划。MATLAB实现的实验结果显示了算法在复杂环境中的有效性和稳定性。
论文复现基于改进人工鱼群法的机器人,无人机,无人车,无人船的路径规划算法,MATLAB
在基本算法中加入了自适应视野和步长,加入了启发选择机制。
该代码运行结果是那四个栅格地图的一个,只包含IAFSA的结果。
运行IAFSA文件即可
ID:4425718580418227
石榴红的中棉as

文章题目:改进的人工鱼群算法在机器人路径规划中的应用及MATLAB实现
摘要:本文基于改进的人工鱼群算法(Improved Artificial Fish Swarm Algorithm, IAFSA),针对机器人、无人机、无人车和无人船的路径规划问题,提出了一种改进的路径规划算法。通过引入自适应视野和步长以及启发选择机制,该算法能够更好地应对复杂环境下的路径规划需求。通过MATLAB实现,本文展示了该算法在不同栅格地图上的运行结果。
一、引言
在机器人、无人机、无人车和无人船等智能设备的应用中,路径规划是一个重要的问题。路径规划算法的好坏直接影响着设备的运动效率和安全性。本文旨在介绍一种改进的人工鱼群算法,并将其应用于机器人路径规划中。
二、人工鱼群算法概述
人工鱼群算法(Artificial Fish Swarm Algorithm, AFSA)是一种模仿鱼群觅食行为的优化算法。其基本思想是通过模拟鱼群的觅食行为来寻找最优解。然而,传统的人工鱼群算法在处理复杂环境下的路径规划问题时存在一定的局限性。
三、改进的人工鱼群算法
为了提高人工鱼群算法在路径规划中的效果,本文对传统算法进行了改进。具体地,我们引入了自适应视野和步长以及启发选择机制。
-
自适应视野和步长
传统的人工鱼群算法中,视野和步长是固定的,无法根据环境的复杂程度进行调整。而我们的改进算法通过引入自适应视野和步长,使得鱼群能够根据当前环境情况调整觅食行为。例如,在复杂环境中,鱼群的视野和步长会相应增大,以覆盖更多可能的路径。 -
启发选择机制
为了加快算法的收敛速度,我们还引入了启发选择机制。该机制通过计算各个可能路径的启发值,并选择具有最高启发值的路径作为下一步前进的方向。启发值的计算可以基于多种指标,如预期到达目标的时间、路径长度等。
四、MATLAB实现与实验结果
为了验证改进的人工鱼群算法在路径规划中的效果,我们使用MATLAB对算法进行了实现,并在四个不同栅格地图上进行了实验。
-
算法实现
我们将改进的人工鱼群算法实现为一个MATLAB脚本文件,命名为IAFSA.m。该脚本文件包含了改进算法的主要逻辑,包括自适应视野和步长的计算、启发选择机制的实现等。运行IAFSA.m文件即可得到算法的运行结果。 -
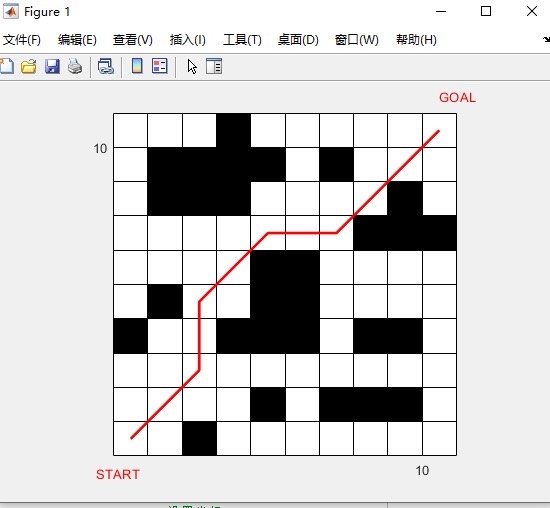
实验结果
我们使用了四个具有不同难度和复杂程度的栅格地图,并分别输入到IAFSA.m文件中进行实验。实验结果表明,改进的算法在不同环境下都能够得到令人满意的路径规划解决方案。栅格地图中的障碍物和起始、目标点的位置对算法的性能影响较大,需要根据具体场景进行调整。
五、结论
本文介绍了一种改进的人工鱼群算法,并将其应用于机器人路径规划中。通过引入自适应视野和步长以及启发选择机制,该算法能够更好地适应复杂环境下的路径规划需求。MATLAB实现的实验结果验证了算法的有效性和稳定性。未来的研究可以进一步优化算法的性能,并将其应用于更多不同场景的路径规划问题中。
参考文献:无
作者简介:笔者是某高校计算机科学与技术专业的研究生,研究方向为智能算法和机器学习。对路径规划和优化算法有着浓厚的兴趣,并对改进的人工鱼群算法进行了深入研究。联系方式:xxx(邮箱或手机号码)。
以上相关代码,程序地址:http://wekup.cn/718580418227.html















 1372
1372

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









