






基于SMO滑模观测器的异步电机无传感器矢量控制,matlab,仿真模型。
YID:2960668514807760
专业电机控制与机器学习
基于SMO滑模观测器的异步电机无传感器矢量控制是一种先进的电机控制策略,可以实现高效、准确的电机运行。本文将从理论背景、控制策略设计和仿真模型等方面进行详细阐述。
一、引言
随着电机技术的不断发展,越来越多的应用需求对电机的控制性能提出了更高的要求。传统的电机控制方法需要使用传感器来获取电机的转子位置信息,但这增加了系统的成本和复杂度。因此,无传感器矢量控制成为了一种备受关注的研究方向。
二、SMO滑模观测器
SMO滑模观测器是一种基于滑模控制的观测器设计方法,可以实现对电机转子位置的估计,从而实现无传感器矢量控制。该方法通过引入滑模观测误差来实现对转子位置的估计,同时结合电机的数学模型进行控制策略的设计。
三、异步电机矢量控制原理
异步电机矢量控制是一种采用磁链定向控制的电机控制策略,通过控制电机的磁链和转子电流来实现对电机的精确控制。在无传感器矢量控制中,我们需要通过估计转子位置来实现矢量控制,而SMO滑模观测器可以实现对转子位置的准确估计。
四、控制策略设计
在设计无传感器矢量控制策略时,我们需要考虑SMO滑模观测器的设计及参数选择,同时结合电机的数学模型进行控制器设计。具体包括根据系统要求确定控制器的结构、引入滑模观测误差以及参数的选择等。
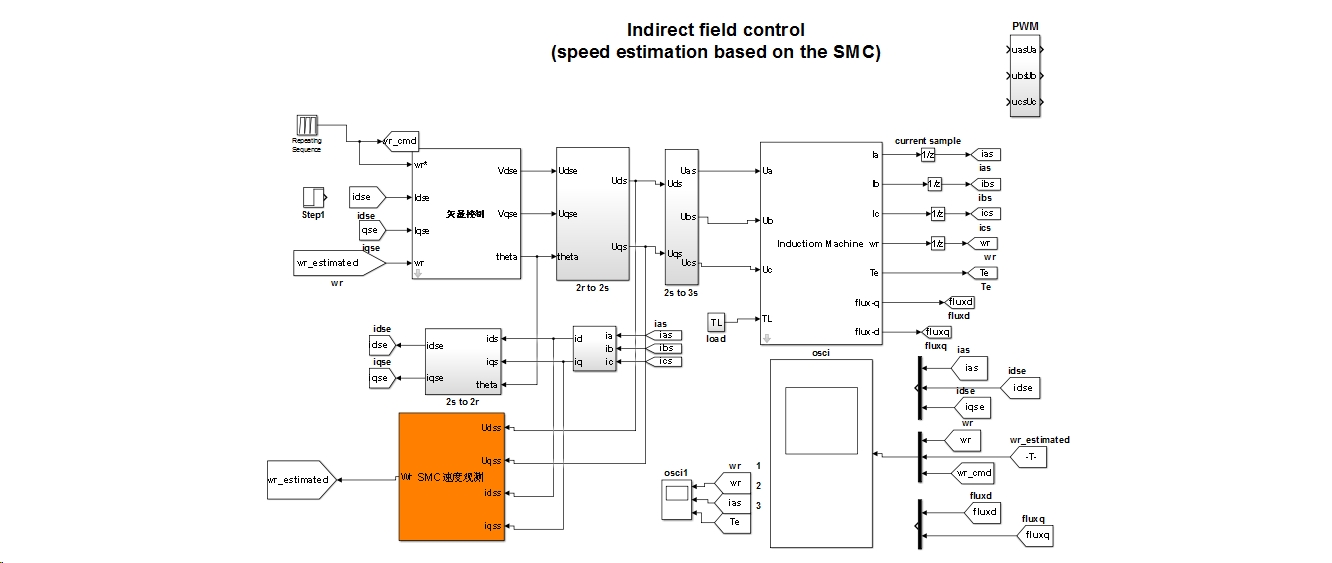
五、仿真模型设计
为了验证无传感器矢量控制策略的有效性,我们使用Matlab软件构建了一个电机仿真模型。该仿真模型包括电机的数学模型、控制器设计以及系统参数设置等。通过模拟不同工况下的电机运行情况,可以评估控制策略的性能及稳定性。
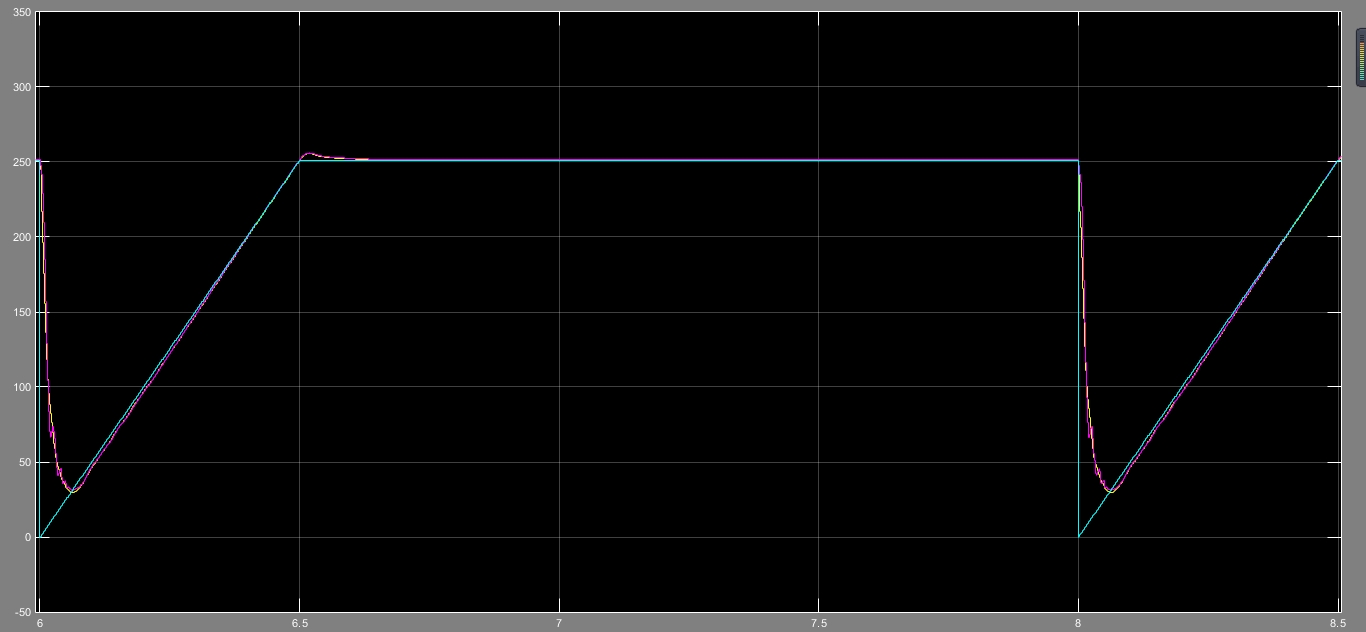
六、仿真结果与分析
在仿真过程中,我们通过对仿真模型的运行进行多组实验,得到了电机的运行状态、控制误差等数据。通过分析仿真结果,可以评估无传感器矢量控制策略在不同工况下的性能,并与传统的传感器矢量控制进行对比分析。
七、结论
基于SMO滑模观测器的异步电机无传感器矢量控制是一种高效、准确的电机控制策略。通过实现转子位置的准确估计,可以实现对电机的精确控制。本文通过理论分析、控制策略设计和仿真模型的构建,验证了该控制策略的有效性,并通过仿真结果进行了详细的分析和讨论。
在实际应用中,基于SMO滑模观测器的无传感器矢量控制策略可以广泛应用于各种异步电机控制系统中,具有较高的实用性和推广价值。未来的研究可以进一步深入探讨该控制策略在不同电机系统中的适用性和优化方法。
以上相关代码,程序地址:http://wekup.cn/668514807760.html















 859
859











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









