






永磁同步电机PMSM直接转矩滞环控制
Matlab Simulink仿真模型(成品)
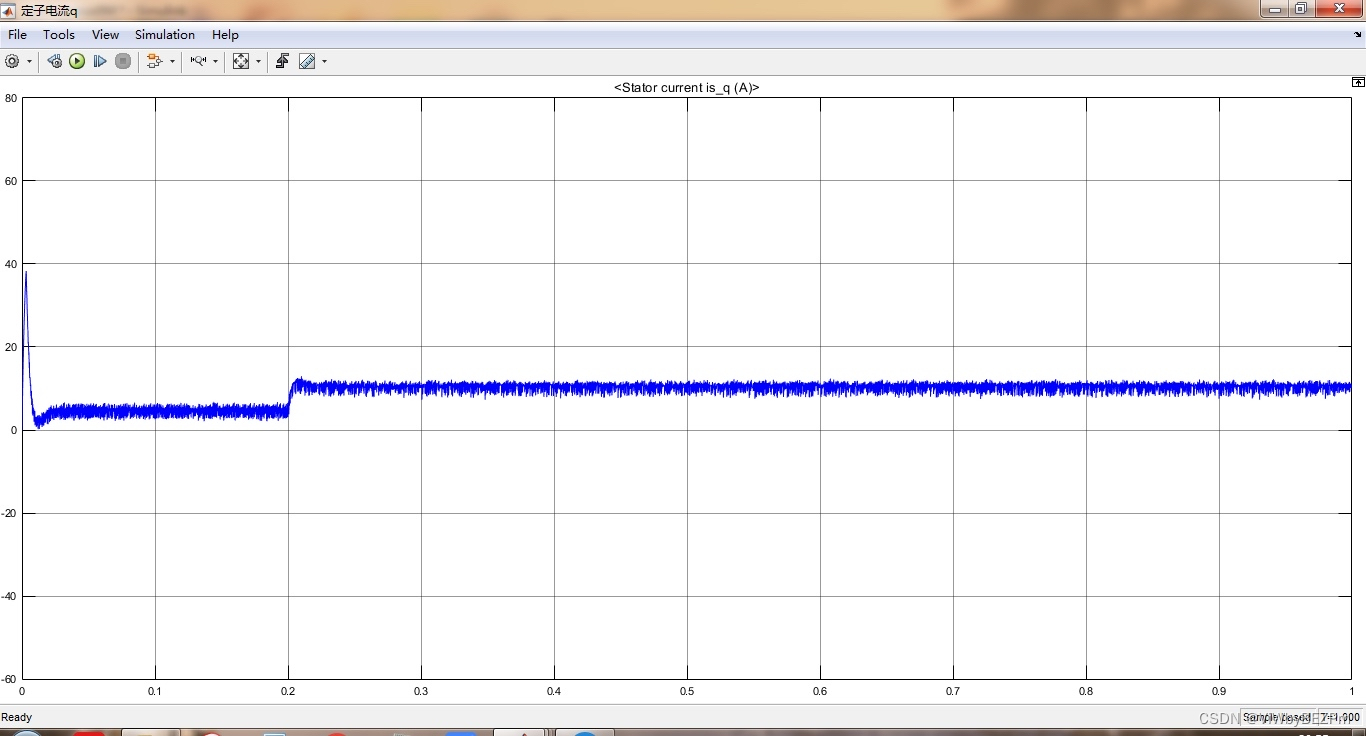
1.采用三闭环控制:转速外环采用PI调节器,转矩环和磁链环经过滞环后得到PWM脉冲
2.采用DTC直接转矩控制
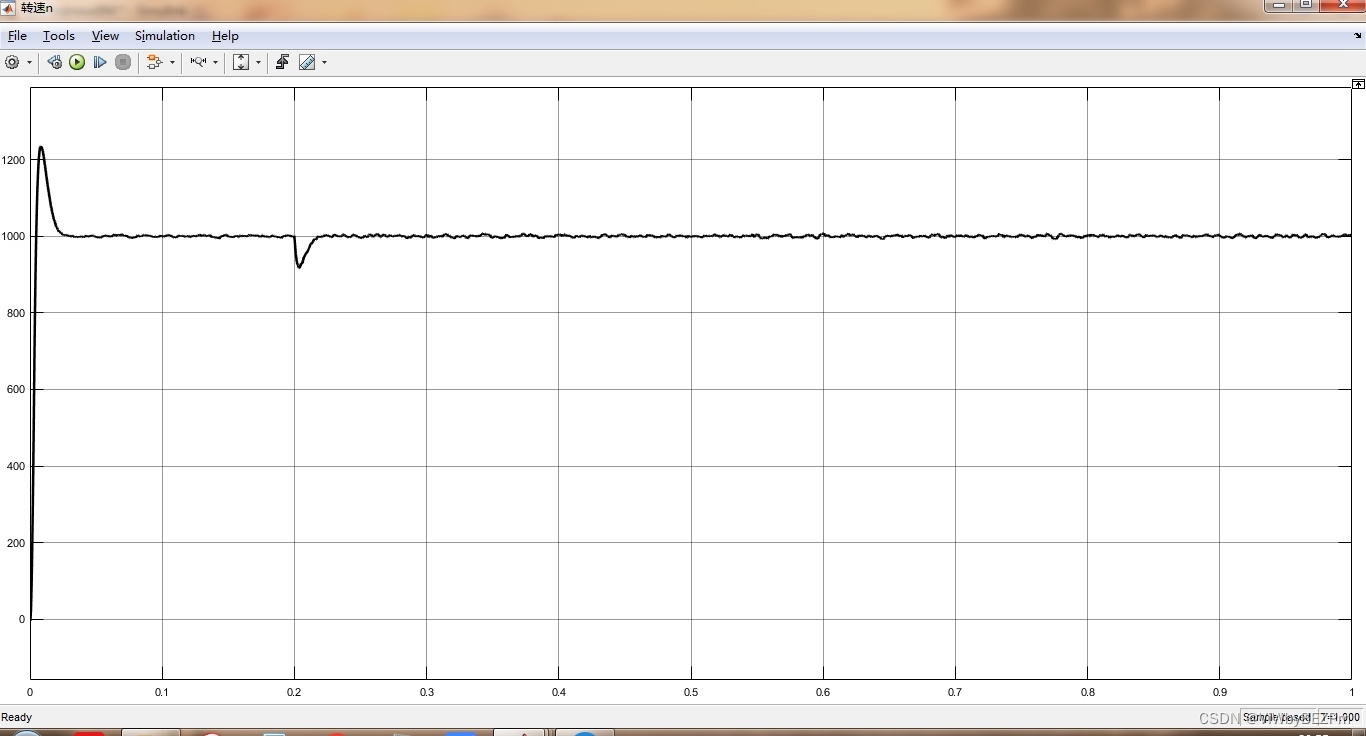
3.跟踪性能良好,给定转矩突变时能快速跟随
4.各个模块分类明确容易理解

永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)具有高效、高功率密度、高可靠性等优点,被广泛应用于工业控制和机械传动领域。本文主要介绍PMSM直接转矩滞环控制技术,并基于Matlab Simulink建立仿真模型,验证该控制方法的有效性。
在PMSM控制中,直接转矩控制(Direct Torque Control,简称DTC)是一种常用的控制方法。它通过辨识电机的状态量,直接计算出控制所需的电压和电流,从而实现对转矩、速度等状态量的控制。相对于传统控制方法,DTC具有控制响应快、转矩响应精度高等优点,因此被广泛应用于各种PMSM控制系统中。
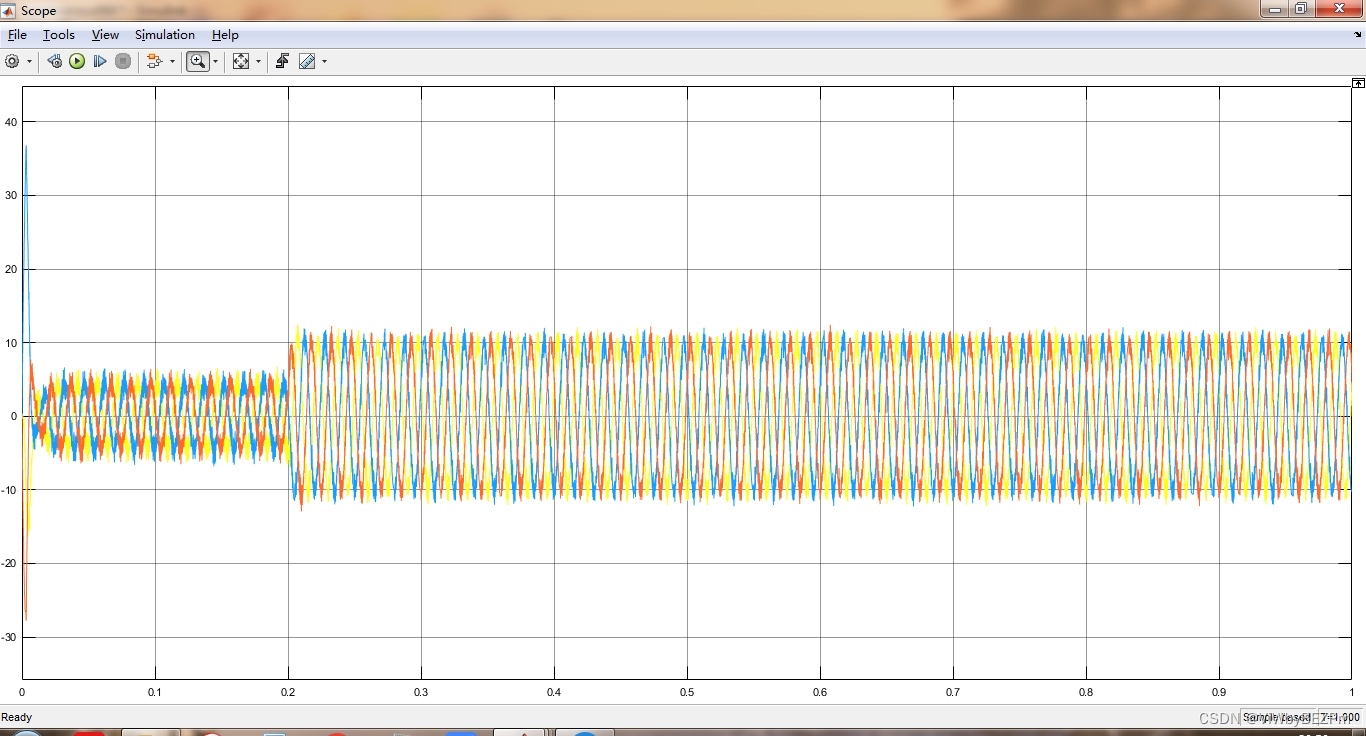
在DTC控制中,转矩和磁链滞环技术被广泛应用。转矩和磁链滞环技术是一种通过滞环处理的方式,将控制器输出的电压和电流转换为PWM信号,从而实现对PMSM的控制。在本文中,我们采用三闭环控制方法,其中转速外环采用PI调节器,转矩环和磁链环经过滞环处理后得到PWM脉冲。这种控制方法可以有效地提高系统的稳定性和控制精度。
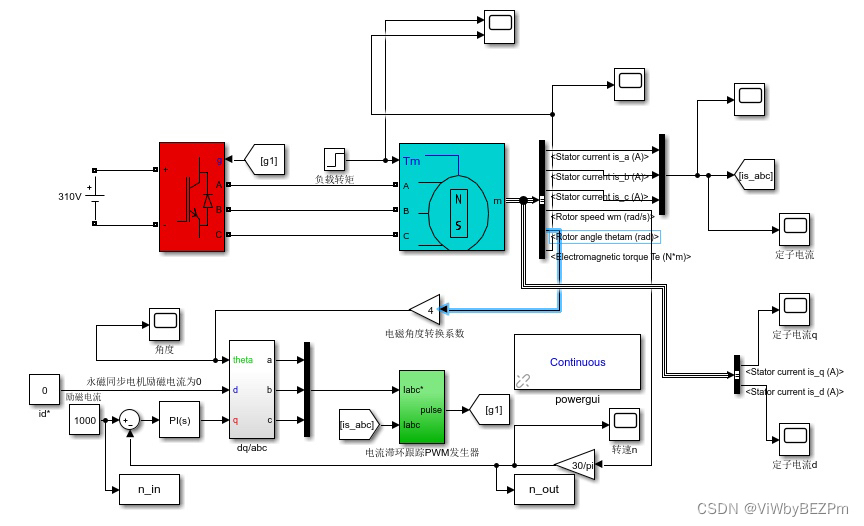
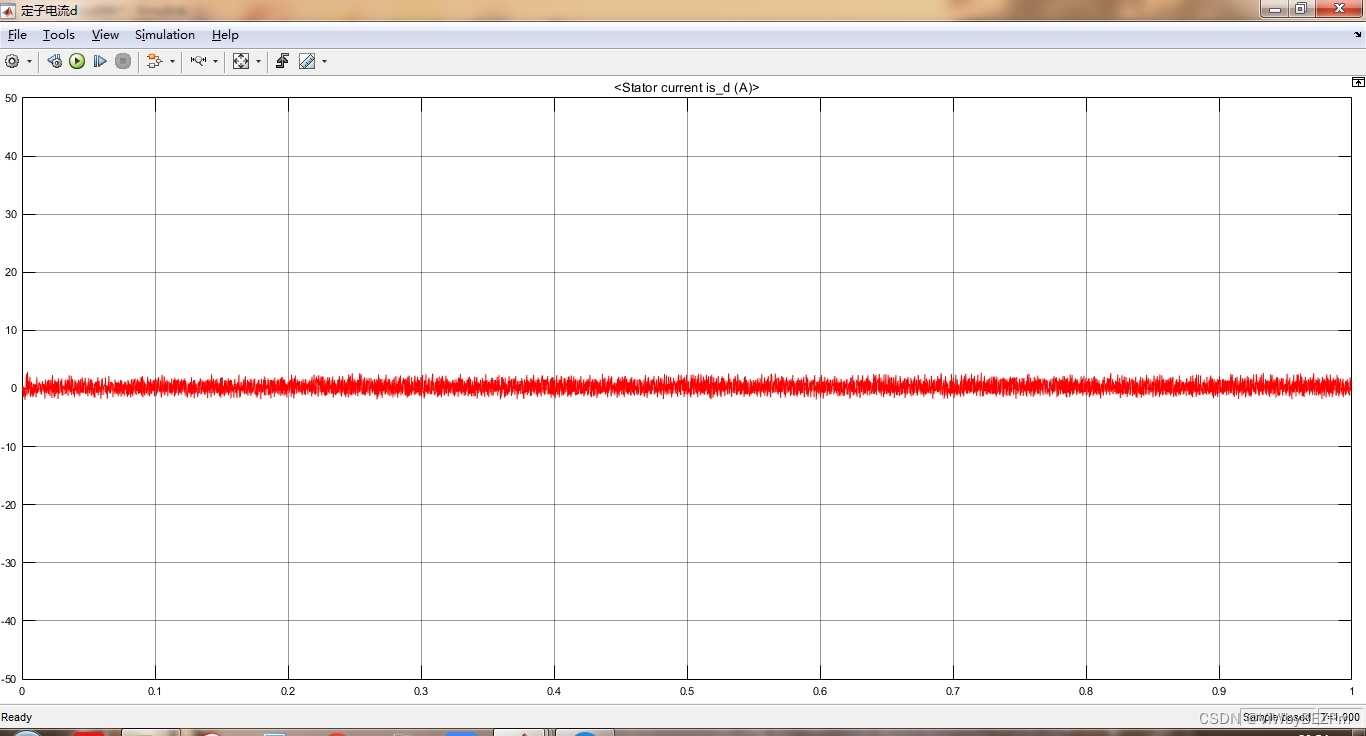
为验证系统的控制性能,我们基于Matlab Simulink进行了仿真,建立了PMSM直接转矩滞环控制的仿真模型。在该模型中,我们采用了基于DTC控制的转矩和速度控制器,通过控制器对电机进行直接控制,实现对转矩、速度等状态量的控制。仿真结果表明,该控制方法具有较高的控制精度和快速响应性,对于给定转矩突变等情况也能够快速跟随。
此外,我们的模型采用了明确的模块化设计,不同部分的功能分别模块化实现,提高了模型的可读性和可维护性。同时,我们也对模型的各个部分进行了详细的分析,全面展示了PMSM直接转矩滞环控制方法的优点和实现方法,为读者深入了解该控制方法提供了有益的参考。
综上,本文基于Matlab Simulink建立了PMSM直接转矩滞环控制的仿真模型,采用三闭环控制方法,通过滞环处理得到PWM脉冲,实现对电机的控制。仿真结果表明,该控制方法具有较高的控制精度和快速响应性,在实际应用中具有广泛的应用前景。同时,模型的明确模块化设计和详细分析也为读者深度理解该控制方法提供了实用的工具。
相关代码,程序地址:http://lanzouw.top/673803572018.html














 403
403











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









