






 本文探讨了传统直接转矩控制在三相永磁同步电机中的局限,特别是滞环比较器导致的转矩脉动问题。通过建立数学模型和使用非线性控制策略,研究者设计了一种新型控制器,成功降低了转矩脉动并提高了电机的响应速度和动态品质。实验结果显示,基于非线性控制的电机表现出更好的调速性能和抗负载扰动能力。
本文探讨了传统直接转矩控制在三相永磁同步电机中的局限,特别是滞环比较器导致的转矩脉动问题。通过建立数学模型和使用非线性控制策略,研究者设计了一种新型控制器,成功降低了转矩脉动并提高了电机的响应速度和动态品质。实验结果显示,基于非线性控制的电机表现出更好的调速性能和抗负载扰动能力。
摘 要
永磁同步电动机由于具备体积较小,工作效率高等优势而广为应用,直接转矩控制是电机使用的主要控制方式,传统直接转矩控制一般使用开关表和滞环比较器来实现,然而滞环比较器不能完成转矩大小的区分,因此转矩脉动较大的问题一直存在于这种控制方式,本文将着重探究滞环比较方法产生转矩脉动较大的原因,最终实现转矩脉动的降低。
首先对直接转矩控制形式的研究现状进行阐述,并在此基础上对目前的研究发展趋势进行讨论,并建立了永磁同步电机的数学模型,探究了滞环比较方法,建立了Simulink仿真结构图,得出仿真结果,分析产生转矩脉动的原因,原因主要是因为滞环比较器不能区分转矩偏差的大小。
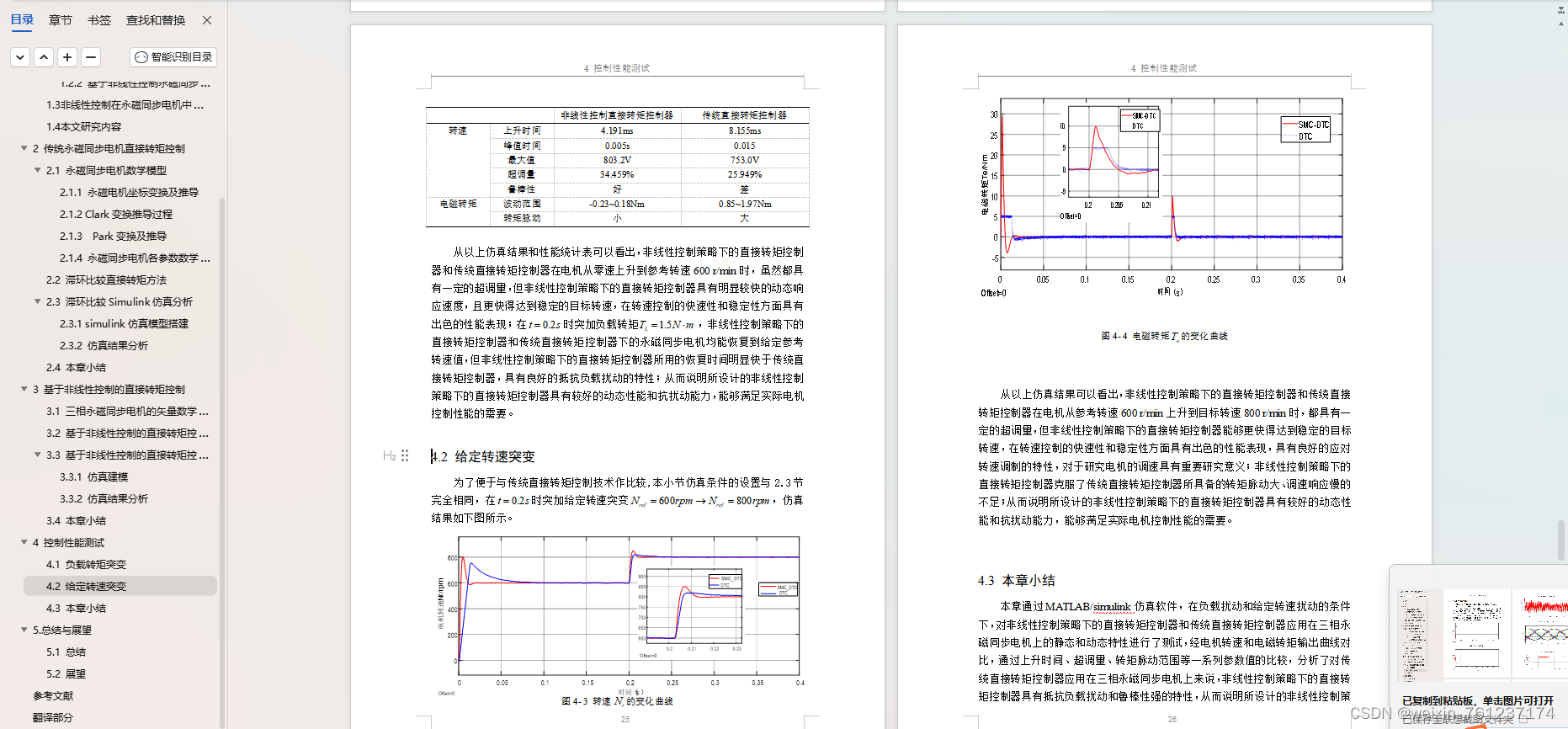
本文将尝试通过先进的非线性控制策略来改进传统直接转矩控制的三相永磁同步电机的响应速度和动态品质。通过仿真软件MATLAB/Simulink建立基于非线性控制策略的直接转矩控制器应用于三相永磁同步电机的仿真模型,与传统直接转矩控制器应用于三相永磁同步电机的输出性能进行比较,以改进传统直接转矩控制器应用于三相永磁同步电机的诸如转矩脉动较大、调节时间长等不足,并进行负载扰动和转速扰动测试,结果表明,基于非线性控制策略的直接转矩控制器对于提高电机的调速性能及抵抗负载扰动等性能具有重要意义。
本课题共有图28幅,表4个,参考文献23篇。
关键词:非线性控制策略; 三相永磁同步电机; 鲁棒性。


















 903
903

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











