






西门子1215与1212做的程序,成功项目,一个程序包含modbus rtu通讯,与库卡C2机器人的profibus通讯,两个1200之间的S7通讯,与威纶通触摸屏的以太网通讯,包含变频器控制,伺服控制(伺服功能块本人将PTO控制常用指令集成在一个FB块里),使用4个台达伺服和2个步进,仅供各位参考
ID:7450642327375591
k花非花k
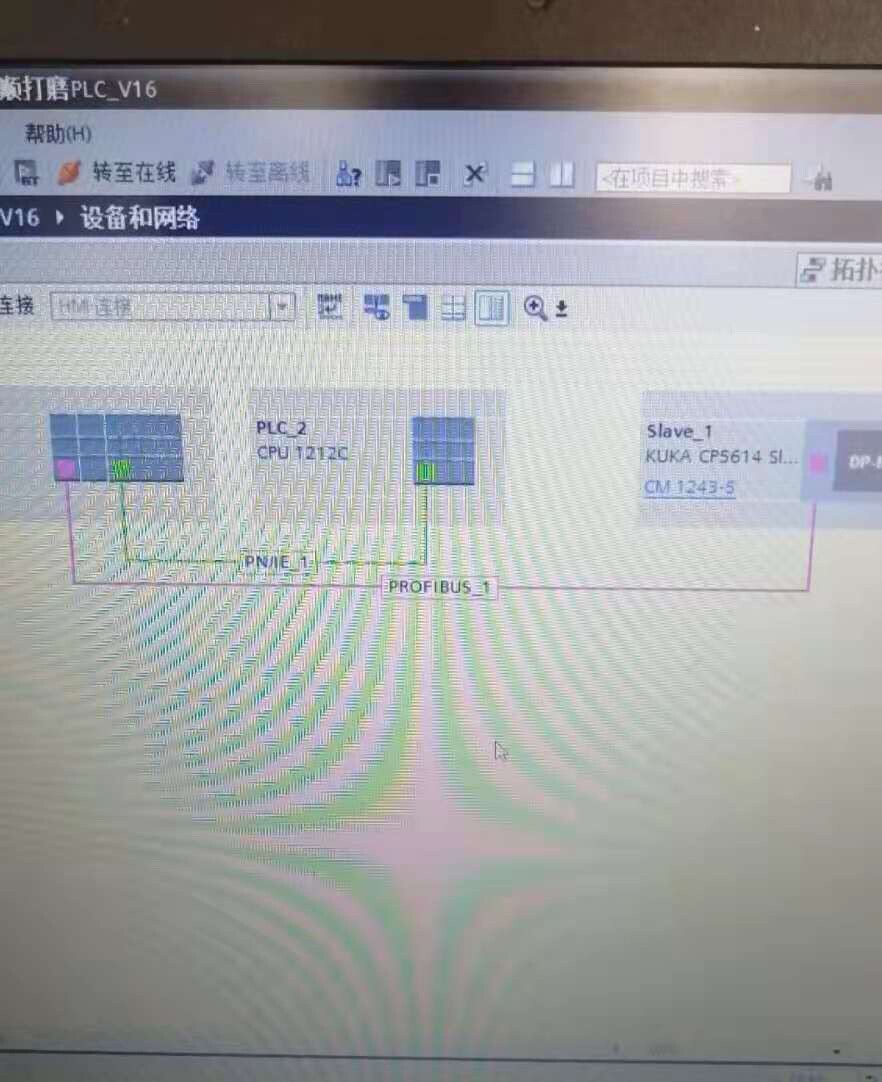
西门子1215与1212做的程序是一个成功的项目。这个程序包含了多个通讯方式,其中包括modbus rtu通讯、库卡C2机器人的profibus通讯、两个1200之间的S7通讯,以及与威纶通触摸屏的以太网通讯。除此之外,这个程序还包含了变频器控制和伺服控制。
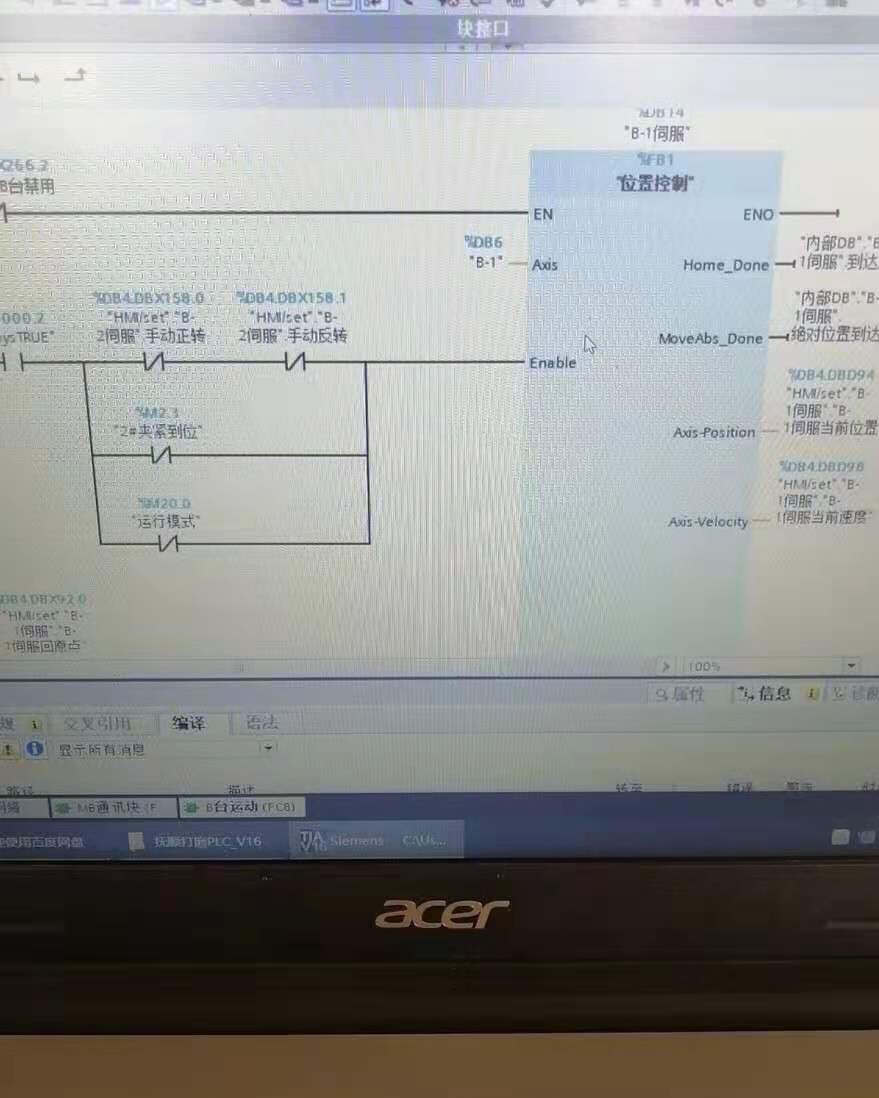
在程序中,我将伺服功能块中常用的PTO控制指令集成在一个函数块(FB)中,以提高程序的可读性和维护性。该函数块可以在控制系统中方便地调用,使得伺服控制更加灵活和高效。在这个程序中,我使用了4个台达伺服和2个步进驱动器,以满足不同的控制需求。
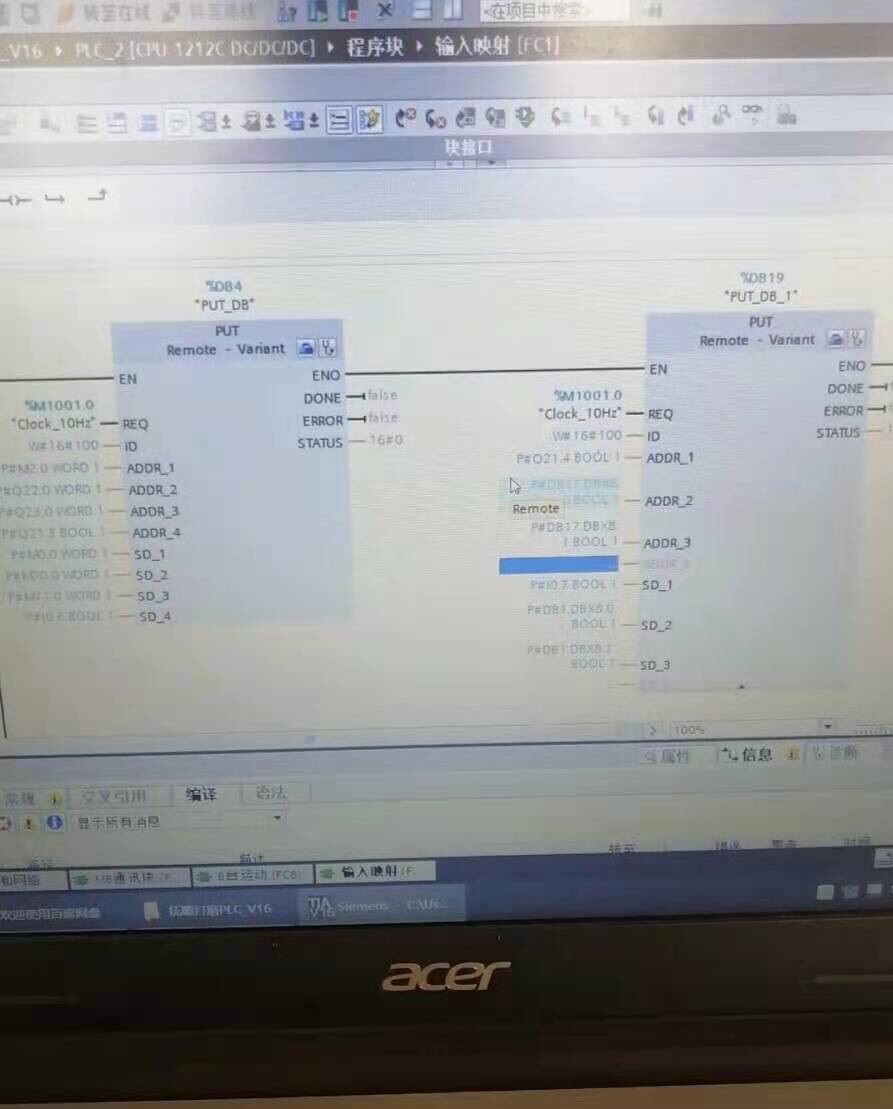
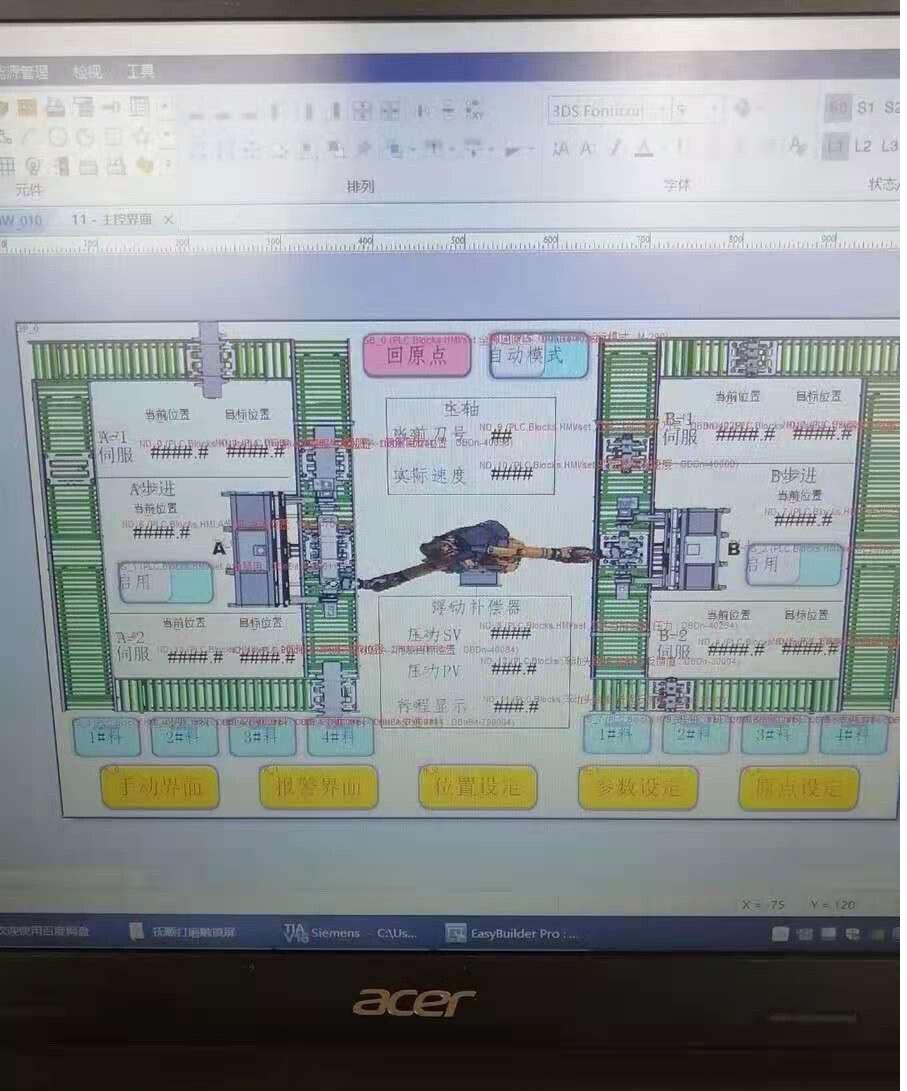
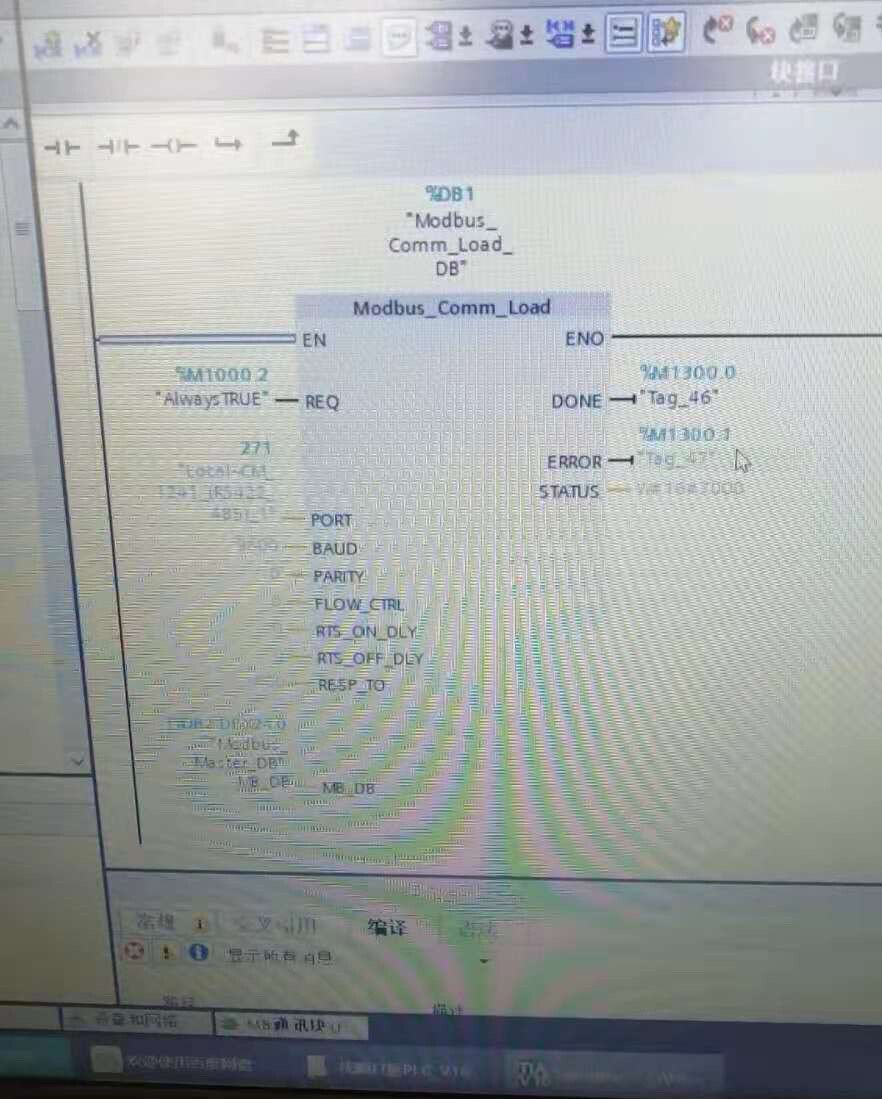
在整个程序的开发过程中,我们注重了不同通讯方式之间的数据传输和交互。通过modbus rtu通讯,我们可以与外部设备进行数据交换,实现数据的读取和控制。通过profibus通讯,我们可以与库卡C2机器人实现数据的传输和控制,从而实现机器人的自动化操作。通过S7通讯,我们可以实现两个1200之间的数据交换和控制,以及与其他设备的协同工作。通过以太网通讯,我们可以与威纶通触摸屏进行数据交互,实现触摸屏的远程控制和监控。
在变频器控制方面,我们使用了适当的参数设置和控制策略,以实现对电机转速的精确控制。通过调整变频器的频率和电压,我们可以实现不同转速和负载下的精确控制,从而满足不同的工艺要求和运行条件。
伺服控制是该程序的重要部分,我们使用了台达伺服和步进驱动器来实现对电机位置和速度的控制。通过适当的参数设置和控制策略,我们可以实现高精度的位置控制和快速的速度响应。在伺服功能块中,我将PTO控制指令集成在一个函数块中,使得对伺服的控制更加方便和高效。
总结而言,西门子1215与1212做的这个程序是一个成功的项目,它集成了多种通讯方式和控制功能,满足了不同设备之间的数据交互和控制需求。通过合理的参数设置和控制策略,我们可以实现对电机转速和位置的精确控制,从而提高设备的生产效率和质量。通过整合不同的控制功能和通讯方式,这个程序为工程师们提供了一个实现自动化控制的参考,并为未来的项目提供了启示和借鉴。
相关的代码,程序地址如下:http://imgcs.cn/642327375591.html
















 269
269











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









