






永磁同步电机PMSM扩展卡尔曼滤波无速度传感器EKF仿真模型matlab
ID:4890642380622414
北朝有为青果
永磁同步电机(Permanent Magnet Synchronous Motor,简称PMSM)作为一种高性能、高效率的电机,被广泛应用于各个领域。在PMSM的控制中,精确估计电机的转速是非常关键的一步,但是传统的速度传感器对于系统成本和可靠性都存在一定的限制。因此,研究者们提出了一种无速度传感器的方法,即基于卡尔曼滤波的扩展卡尔曼滤波(Extended Kalman Filter,简称EKF)。
EKF是一种基于贝叶斯滤波理论的非线性滤波算法,它可以通过对系统状态的动态建模和测量数据的方差进行递推估计,从而实现对状态的准确估计。在PMSM的控制中,EKF被广泛应用于无速度传感器的转速估计。通过测量电机绕组的电流、电压以及转矩等信息,结合永磁同步电机的数学模型,可以利用EKF准确地估计电机的转速。
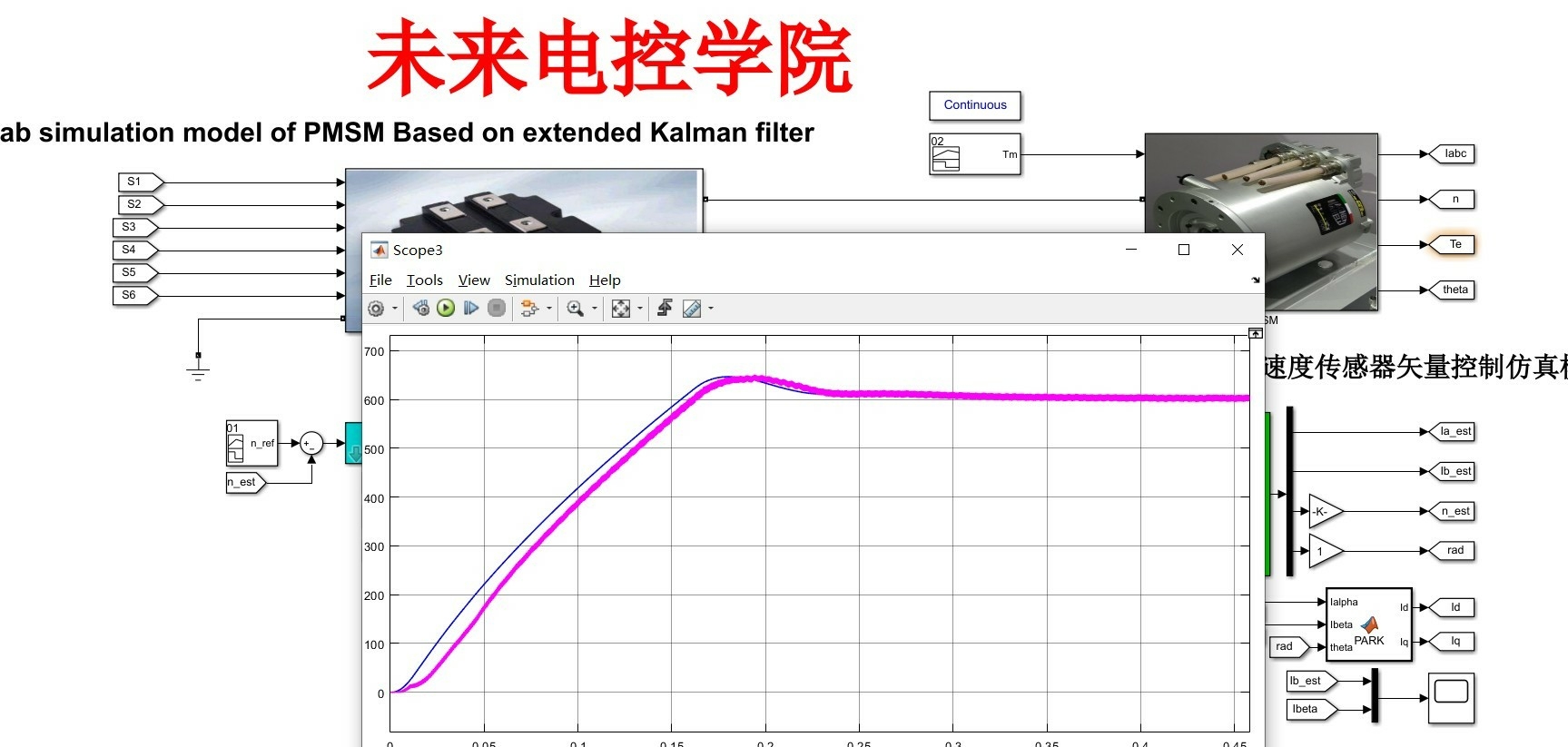
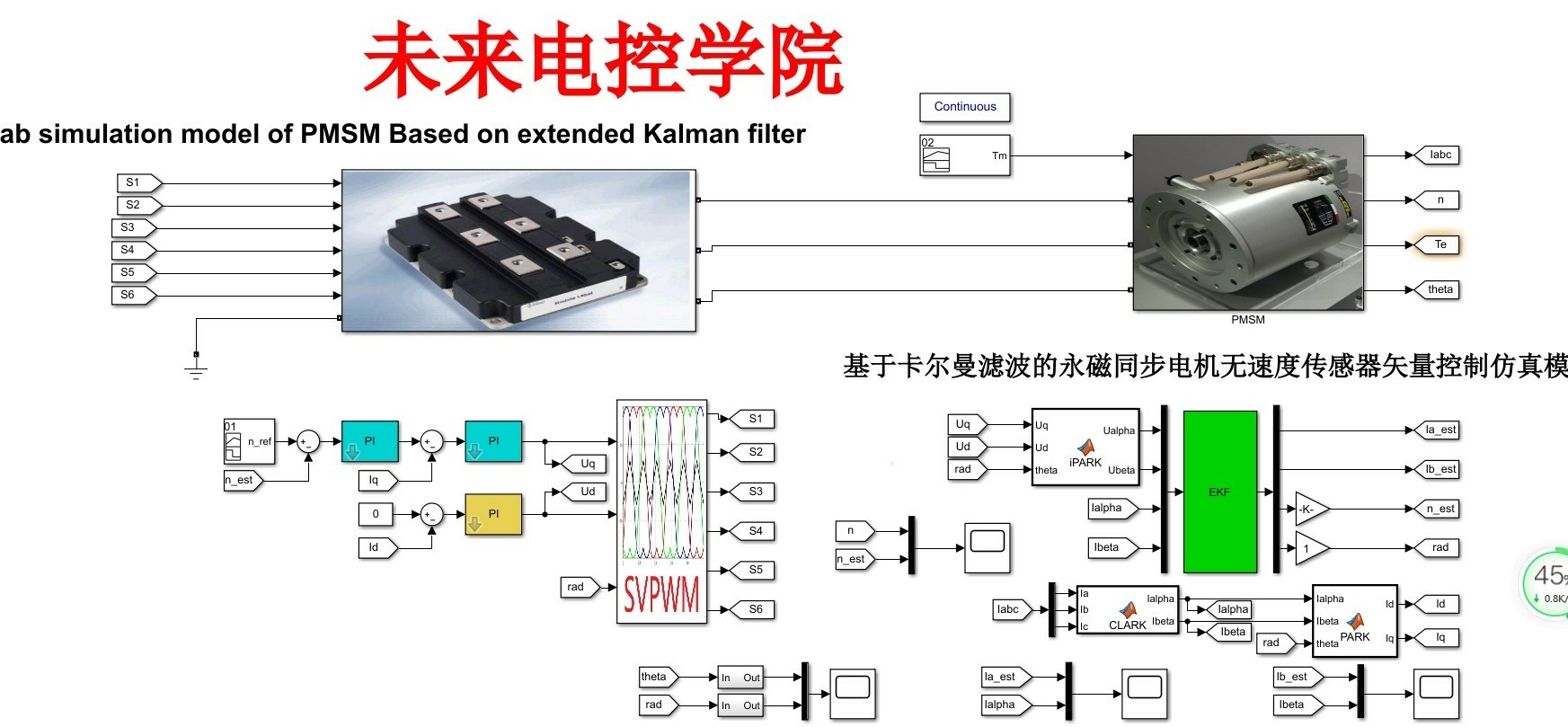
基于EKF的无速度传感器转速估计方法主要包括以下几个步骤。首先,需要建立永磁同步电机的数学模型,包括转子和定子的动态方程。然后,通过测量电机的电流、电压、转矩等信息,可以得到系统的输入和输出数据。接下来,采用EKF算法对电机的状态进行估计,通过状态估计值可以得到电机的转速。最后,通过与实际测量值进行比较,可以评估无速度传感器转速估计方法的准确性和可靠性。
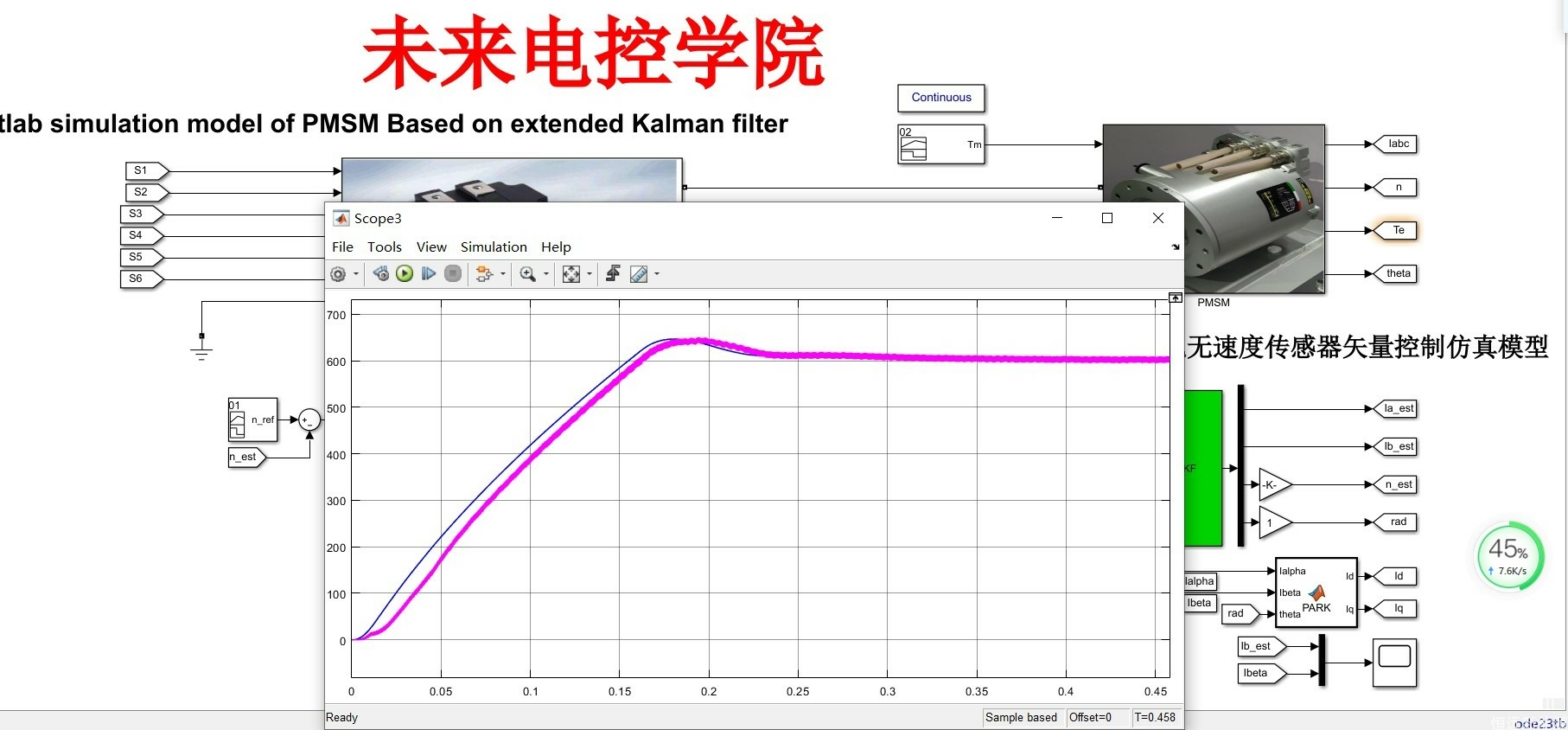
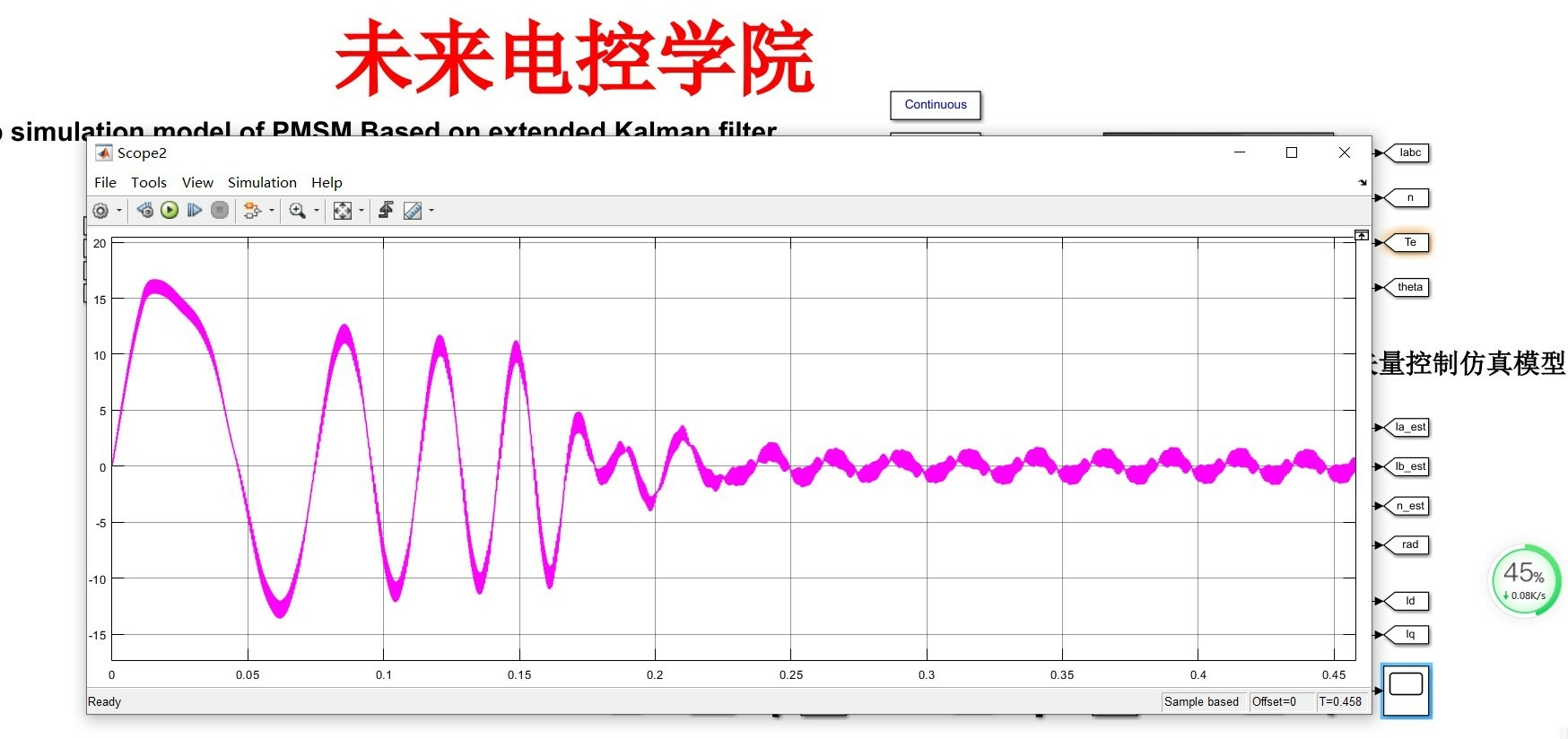
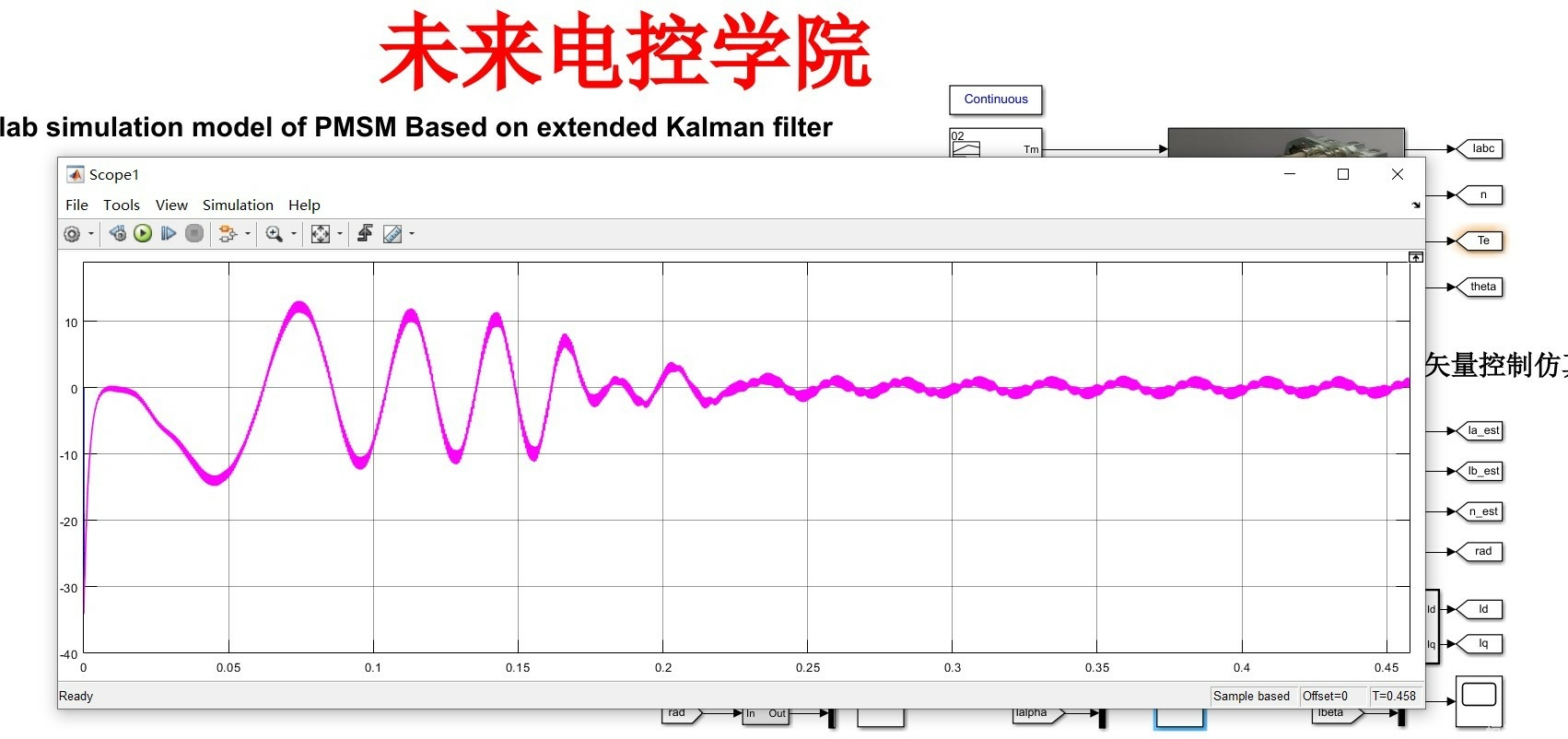
为了验证无速度传感器转速估计方法的性能,可以利用Matlab进行仿真模拟。在仿真模型中,可以设置合适的参数和初值,对不同工况下的电机进行转速估计。通过对比仿真结果和实际测量值,可以评估EKF的转速估计方法在不同工况下的准确性和可靠性。
综上所述,基于EKF的无速度传感器转速估计方法为PMSM的控制提供了一种高效、低成本的解决方案。通过对电机的输入和输出数据进行递推估计,可以准确地实现对电机转速的估计。同时,通过Matlab的仿真模拟,可以验证无速度传感器转速估计方法在不同工况下的性能表现。这对于提高PMSM的控制性能和系统的稳定性具有重要意义。
关键词:永磁同步电机,PMSM,扩展卡尔曼滤波,无速度传感器,EKF,仿真模型,Matlab
相关的代码,程序地址如下:http://imgcs.cn/642380622414.html
















 246
246

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









