







 本文介绍了参加飞思卡尔智能车大赛时,如何通过摄像头矫正方案来提高赛道定位精度。通过将赛道分成等长块,并考虑摄像头的视野特性,将真实赛道映射到摄像头视野中,从而确定数据点与实际赛道的距离。同时,分享了测试赛道与视野映射的方法,包括使用尺子、黑胶带和专业上位机软件进行校准。该方案对摄像头位置一致性有较高要求。
本文介绍了参加飞思卡尔智能车大赛时,如何通过摄像头矫正方案来提高赛道定位精度。通过将赛道分成等长块,并考虑摄像头的视野特性,将真实赛道映射到摄像头视野中,从而确定数据点与实际赛道的距离。同时,分享了测试赛道与视野映射的方法,包括使用尺子、黑胶带和专业上位机软件进行校准。该方案对摄像头位置一致性有较高要求。
那个,这是第一次发博客。不知该怎么自称,要不就叫小W吧。
小W本来是想参加飞思卡尔智能车大赛的,结果由于某些原因而不能去了。所以小W把自己想的方案分享一下,希望对大家有所帮助。
在人眼中和摄像头视野中的赛道是分别是这样的。
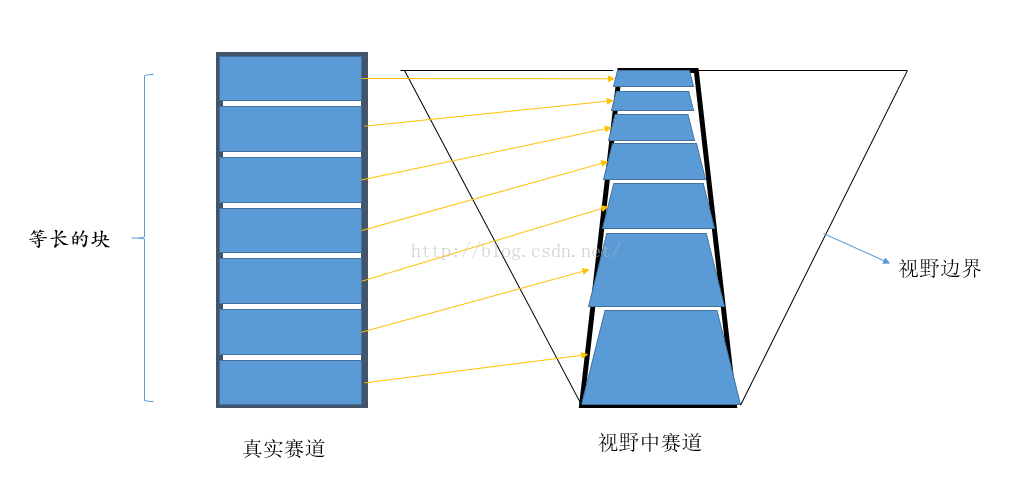
图 1
首先,我们把真实赛道分成一个个等长的块,长度就由各位参加比赛的看官自己定啦。一般我们所用的摄像头是每隔 20 ms 采集一场数据,如果小车以 3 m/s 的速度来算的话,那么小车在场间间隔可以走 6cm。我们的赛道宽度是50多cm ,如果是直道还好说,反正向前冲就是了;但是如果是弯道、坡道和障碍就显得精度不够了。所以我们可以把场间间隔弄小一点。小W测过,如果块的长度是 3 cm , 前瞻1 m 只需40行数据。
然后,如图
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









