






实验目的
- 掌握进程调度的概念。
- 通过学习Linux内核源码编写风格,重点理解进程调度策略算法,包括FCFS、 RR、SRT、Feedback的调度算法。
实验内容
本实验要求在Linux的用户态下编程实现进程调度策略算法的模拟程序
A.验证test4.c:
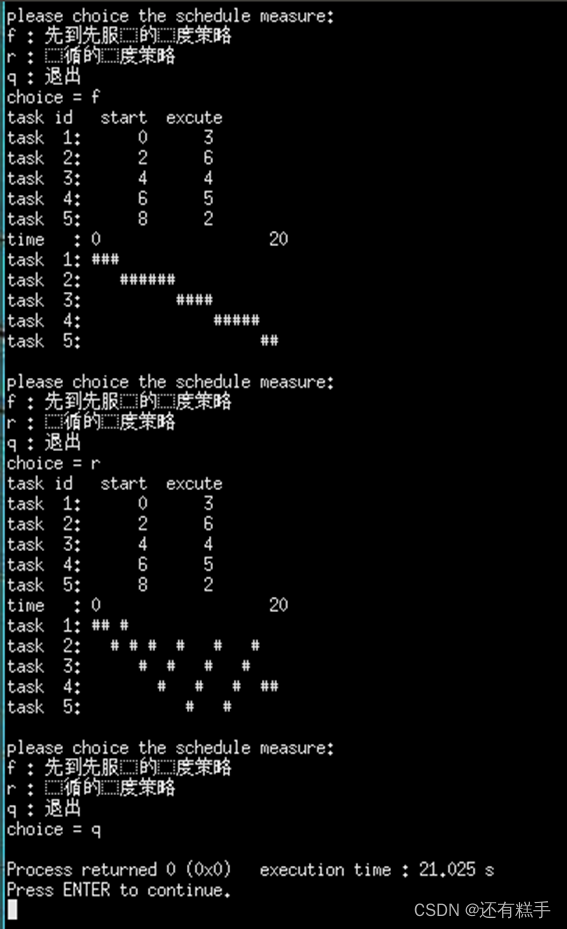
- 1.FCFS(先到先服务)
- 2.RR(轮循)
B.新建工程schedule,实现
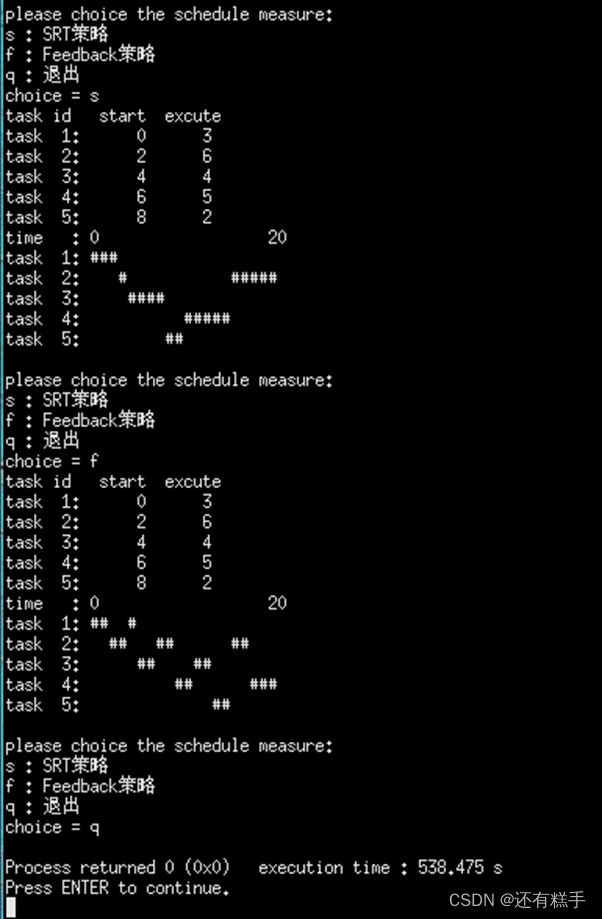
- 3.SRT(最短进程优先)
- 4.Feedback(最短剩余时间)
实验环境
Ubuntu 12.04 LTS
Device name: oslinux-virtual-machine
Memory: 1001.2MiB
Processor: AMD Ryzen 77730U with Radeon Graphics
Graphics: Unknown
OS type: 32-bit
Disk: 20.3GB
实验步骤
- 1. 验证test4.c,理解FIFO和RR两种算法。
- 2. 编写SRT和Feedback两种算法,测试运行结果,编写实验报告。
5.实验结果
实验一结果
实验二结果
核心代码
/***************进程调度实验**************/
/*****************************************
采用的是linux0.12的内核编写风格,可参考赵炯的《Linux内核完全剖析》
Author.gdong.guan
版权所有,仅供学习,不要发布到网上
******************************************/
#include<stdio.h>
#include<sys/time.h>
#include<malloc.h>
#include<stdlib.h>
#define NR_TASKS 64 //系统支持的进程个数
#define TASK_RUNNING 0 //就绪态
#define TASK_UNINTERRUPTIBLE 2 //不可中断的睡眠状态
#define TASK_ZOMBIE 3 //僵死态
//进程表项
struct task_struct{
long pid; //进程号
long state; //进程运行状态
long priority; //优先数
long counter; //进程剩余时间片
long start_time; //进程开始时间
long excute_time; //进程执行时间
long flag;
};
struct task_struct init_task = {
.pid = 0,
.state = 0,
.priority = 0,
.counter = 0,
.start_time = 0,
.excute_time = 0,
.flag = -1
};
struct task_struct *current = &init_task;
unsigned long volatile jiffies = 0; //系统滴答数
struct task_struct* task[NR_TASKS] = {&init_task,}; //进程指针数组
#define FIRST_TASK task[0]
#define LAST_TASK task[NR_TASKS-1]
struct run_q { //进程就绪队列
struct task_struct *data;
struct run_q *next;
};
struct run_q *head=NULL,*end=NULL,*r_temp;
#define N_PROCESS 5 //进程个数
#define MAX_RUNTIME 100 //最长运行时间
int process[N_PROCESS][2]={{0,3},{2,6},{4,4},{6,5},{8,2}};//进程初始值
int totalExcuteTime = 0; //cpu总的运行时间
int runState[N_PROCESS][MAX_RUNTIME] = {0}; //进程运行状态的记录
void checkProcessCome(); //判断是否有进程到达,如果有则创建进程
void pause(); //0号进程的运行体
void schedule_f(); //FCFS调度程序
void schedule_s(); //RR调度程序
void switch_to(int pid); //进程切换
void init(); //基于优先级调度器的初始化
void run(int pid); //普通进程的运行体
void myfork(int pid); //进程创建
void delete(int pid); //进程清除
typedef void funtype(void);
funtype *schedule = NULL;
int main(int argc,char **argv)
{
int i,j;
int choice;
while(1){
printf("please choice the schedule measure:\n");
printf("s : SRT策略\n");
printf("f : Feedback策略\n");
printf("q : 退出\n");
printf("choice = ");
choice = getchar();
if(choice == '\n')
choice = getchar();
switch(choice){
case 's': schedule = schedule_s;break;
case 'f': schedule = schedule_f;break;
case 'q': return 0;
default : {
schedule = NULL;
printf("please input the true symbol(q or s or f)!\n\n");
continue;
}
}
printf("task id start excute\n");
for(i=0;i<N_PROCESS;i++){
printf("task %2d: %6d %6d\n",i+1,process[i][0],process[i][1]);
totalExcuteTime+=process[i][1];
}
init();
//打印进程调度情况
printf("time : 0%*c%d\n",totalExcuteTime-2,' ',totalExcuteTime);
for(i=0;i<N_PROCESS;i++){
printf("task %2d: ",i+1);
for(j=0;j<totalExcuteTime;j++){
if(runState[i][j]==1) printf("#");
else printf(" ");
runState[i][j] = 0;
}
printf("\n");
}
while((head!=NULL)&&(head!=end)){
r_temp = head;
head = head->next;
free(r_temp);
}
if(head){
free(head);
head = NULL;
end = NULL;
}
current = &init_task;
jiffies = 0;
totalExcuteTime = 0;
printf("\n");
}
return 0;
}
int last_mission = -1;
void schedule_f(){
if(last_mission != -1){
if(task[last_mission]->state != TASK_ZOMBIE && task[last_mission]->flag != 0){
task[last_mission]->flag--;
switch_to(last_mission);
return;
}
if(task[last_mission]->flag != 0){
if(task[last_mission]->state == TASK_ZOMBIE){
printf("CHECK\n");
}
}
}
float index;
int sum = 0, i, sub;
for(i = 1;task[i];++i){
sum += process[i-1][1] - task[i]->excute_time;
}
index = (float)(sum) / (float)(i);
int next = 0;
if(current->state != TASK_RUNNING){
r_temp = head;
if(head == end){
head = NULL;
end = NULL;
}else{
head = head->next;
end->next = head;
}
free(r_temp);
}else if(head){
head = head->next;
end = end->next;
}
for(i = 1;task[i];++i){
if(task[i]->pid == head->data->pid){
sub = i;
break;
}
}
if(process[sub-1][1] - head->data->excute_time > index){
head->data->flag = 2;
}else{
head->data->flag = 1;
}
if(head){
next = head->data->pid;
}
last_mission = sub;
head->data->flag--;
switch_to(next);
}
void schedule_s(){
int sub = 0, min_time = MAX_RUNTIME, i;
for(i = 1;task[i];++i){
int remain_exe_time;
remain_exe_time = process[i-1][1] - task[i]->excute_time;
if(remain_exe_time <= min_time && remain_exe_time != 0){
sub = i;
min_time = remain_exe_time;
}
}
if(sub == 0){
printf("No Process!!!\n");
}
switch_to(task[sub]->pid);
}
void switch_to(int pid){
if(pid)
run(pid);
else
pause();
}
void myfork(int pid){
struct timeval now;
struct run_q *p;
task[pid] = (struct task_struct*)malloc(sizeof(struct task_struct));
task[pid]->state = TASK_UNINTERRUPTIBLE;
task[pid]->pid = pid;
gettimeofday(&now,0);
srand(now.tv_usec);
task[pid]->priority = 2 + (int)(4.0f*rand()/(RAND_MAX+1.0f));
task[pid]->counter = task[pid]->priority;
task[pid]->start_time = jiffies;
task[pid]->excute_time = 0;
task[pid]->state = TASK_RUNNING;
p = (struct run_q*)malloc(sizeof(struct run_q));
p->data = task[pid];
if(head==NULL){
head = end = p;
head->next = end;
end->next = head;
}else{
end->next = p;
end = p;
end->next = head;
}
}
void delete(int pid){
free(task[pid]);
}
void checkProcessCome(){
int i;
for(i=0;i<N_PROCESS;i++){
if(process[i][0]==jiffies)
myfork(i+1);
}
}
void init(){
int i;
for(i=1;i<NR_TASKS;i++){
task[i] = NULL;
}
checkProcessCome();
schedule();
}
void pause(){
current = task[0];
jiffies++;
totalExcuteTime++;
checkProcessCome();
schedule();
}
void run(int pid){
int i;
current = task[pid];
runState[pid-1][jiffies] = 1;
jiffies++;
task[pid]->counter--;
task[pid]->excute_time++;
//判断进程是否运行完,如果是则将进程杀死
if(task[pid]->excute_time==process[pid-1][1]){
task[pid]->state = TASK_ZOMBIE;
}
//判断所有进程是否都运行完,如果是则结束
if(jiffies>=totalExcuteTime) return;
checkProcessCome();
schedule();
}















 1435
1435

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











