







文章作者:里海
来源网站:里海NX二次开发3000例专栏
感谢粉丝订阅
感谢 LYD9625 订阅本专栏。本专栏永久畅读,内容持续更新,知识源源不断,价格也逐渐提升,但已订粉丝不受影响。让我们一起充满激情地进步,不断超越自己。
《里海NX二次开发3000例专栏》是NX二次开发行业订阅量第一的博客专栏。作者里海是一位拥有五年以上NX二次开发经验的工程师。如果您也对NX二次开发充满兴趣,欢迎您也订阅、加群一起交流。
简介
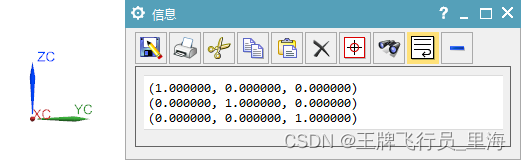
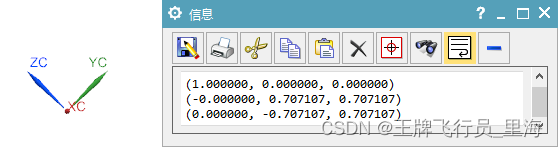
获取wcs工作坐标系的xyz轴方向
效果
文章作者:里海
来源网站:里海NX二次开发3000例专栏
感谢 LYD9625 订阅本专栏。本专栏永久畅读,内容持续更新,知识源源不断,价格也逐渐提升,但已订粉丝不受影响。让我们一起充满激情地进步,不断超越自己。
《里海NX二次开发3000例专栏》是NX二次开发行业订阅量第一的博客专栏。作者里海是一位拥有五年以上NX二次开发经验的工程师。如果您也对NX二次开发充满兴趣,欢迎您也订阅、加群一起交流。
获取wcs工作坐标系的xyz轴方向
 5414
5414

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文

























