










Fast R-CNN 是对原始 R-CNN 模型的改进,旨在提高目标检测的速度和效率,同时保持或提高检测精度。下面是 Fast R-CNN 的详细介绍,包括其改进的架构、关键技术,以及分类和回归的处理方式。
1. Fast R-CNN 的基本架构
Fast R-CNN 在 R-CNN 的基础上做出了显著改进,主要包括以下几个方面:
1.1 特征提取方式的改进
在原始 R-CNN 中,每个候选区域都需要单独进行卷积神经网络(CNN)的特征提取,这导致计算量大且效率低下。Fast R-CNN 通过以下方式进行了改进:
整体图像特征提取:
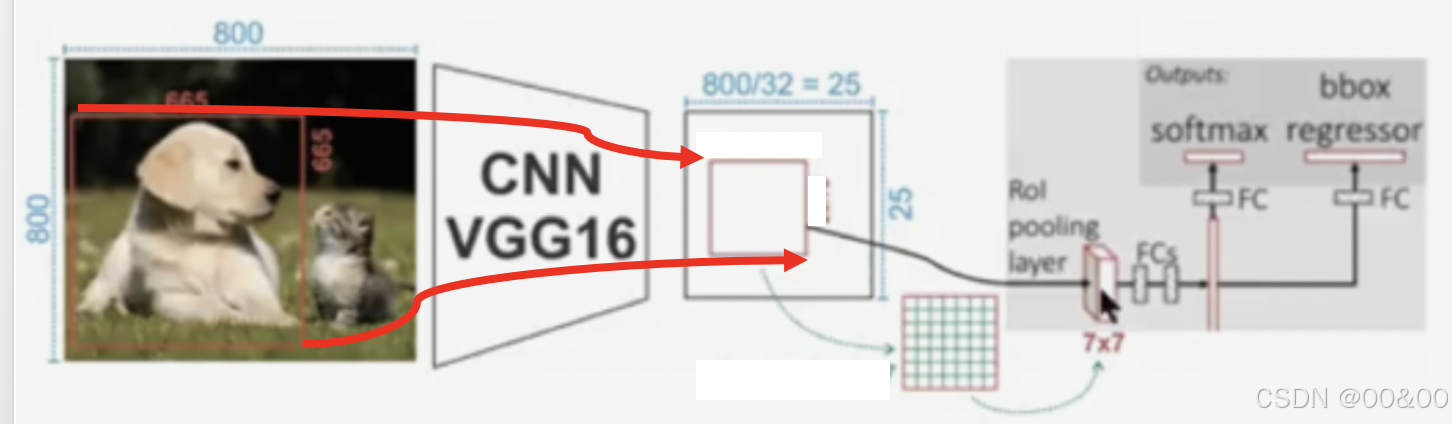
Fast R-CNN 将整个输入图像通过一层卷积神经网络(如 VGG16、ResNet 等)一次性提取特征图(feature map)。该特征图包含了图像中所有区域的高级特征,缩短了计算时间。
RoI Pooling:
Fast R-CNN 使用一种称为 RoI Pooling 的操作来处理候选区域。这一过程从特征图中提取对应于每个候选区域的特征,并将这些特征区域的大小调整到固定大小(如 7x7 或 14x14)以供后续处理。
RoI Pooling 通过将特征图的不同区域尺寸(即候选区域)划分为均匀的小网格,并对每个小网格应用最大池化(Max Pooling),从而保留最显著的特征信息。
1.2 网络架构
Fast R-CNN 的典型架构如下:
步骤1 输入图像:整个图像作为输入。
步骤2 卷积神经网络(CNN):用于提取特征图。
步骤3 RoI Pooling 层:根据候选区域从特征图中提取特征,并调整为相同的尺寸。
步骤4 全连接层:对提取的特征进行处理,以生成分类和回归输出。
步骤5 Softmax 分类器:用于对每个候选区域进行分类。
步骤6 边界框回归层:用于输出边界框的修改(坐标调整),优化框的位置和大小。
2. 分类与回归的处理
Fast R-CNN 在分类和边界框回归的处理方式上采用了端到端的优化方式,具体如下:
2.1 分类
Softmax 分类器**:
Fast R-CNN 使用一个 Softmax 分类器来对每个候选区域进行物体类别的预测。
每个 RoI 的特征经过全连接层后,分类器输出一个概率分布,表示该 RoI 属于各个类别的可能性。它可以处理多个类别,并为每一个候选区域输出一个确定的分类标签。
2.2 边界框回归
边界框回归:
与传统的 SVM 分类器不同,Fast R-CNN 通过回归层同时优化候选区域的边界框位置。回归输出用于精确调整框的坐标。
该回归层预测每个候选区域的边界框相对于原始框的调整量(dx, dy, dw, dh)。这有助于提高检测的准确性,特别是对于物体位置不精确的情况。
3. 训练过程
Fast R-CNN 使用一种多任务损失函数来同时优化分类和回归:
损失函数:
多任务损失函数为:
其中,为分类的损失(通常使用 Softmax 损失),
为回归的损失(通常使用平滑 L1 损失),
是平衡参数,可以控制分类损失和回归损失之间的权重。
4. 优势与应用
4.1 优势
高效性:通过对整个图像的特征集中提取,Fast R-CNN 显著提升了检测速度,候选区域的提取不再需要重复计算。
精确性:结合了多类别分类和边框回归的优势,能够更准确地预测物体的类别和位置。
内存占用:由于仅存储中间特征图,而不是每个候选区域的独立特征,大大减少了内存的使用。
4.2 应用
Fast R-CNN 适用于多种目标检测任务,包括但不限于:
行人检测
车辆检测
人脸检测
医学影像分析
5. 示例
下面是一个简单的 Fast R-CNN 的实现示例,使用 PyTorch 框架。这个示例将展示如何构建 Fast R-CNN 模型的基本架构,包括特征提取、RoI Pooling、分类和边界框回归的过程。
5.1 导入必要的库
import torch
import torch.nn as nn
import torchvision.models as models
import torchvision.ops as ops5.2 定义 Fast R-CNN 模型
class FastRCNN(nn.Module):
def __init__(self, num_classes):
super(FastRCNN, self).__init__()
# 使用预训练的 VGG16 作为特征提取网络
self.backbone = models.vgg16(pretrained=True).features
# RoI Pooling 层
self.roi_pool = ops.MultiScaleRoIAlign(output_size=(7, 7), sampling_ratio=2)
# 分类和回归的全连接层
self.fc_cls = nn.Linear(512 * 7 * 7, num_classes) # 分类层
self.fc_reg = nn.Linear(512 * 7 * 7, num_classes * 4) # 回归层
def forward(self, images, rois):
# 特征提取
features = self.backbone(images)
# RoI Pooling
pooled_features = self.roi_pool(features, rois, images.shape[2:]) # images.shape[2:] 是图像的高和宽
# Flatten
pooled_features = pooled_features.view(pooled_features.size(0), -1)
# 分类
cls_scores = self.fc_cls(pooled_features)
# 边界框回归
bbox_preds = self.fc_reg(pooled_features)
return cls_scores, bbox_preds5.3 定义损失函数
def fast_rcnn_loss(cls_scores, bbox_preds, targets):
# targets 是一个包含真实类别和边界框的字典
cls_targets = targets['labels']
bbox_targets = targets['boxes']
# 计算分类损失(交叉熵损失)
cls_loss = nn.CrossEntropyLoss()(cls_scores, cls_targets)
# 计算边界框回归损失(平滑 L1 损失)
bbox_loss = nn.SmoothL1Loss()(bbox_preds, bbox_targets)
# 总损失
total_loss = cls_loss + bbox_loss
return total_loss5.4 训练模型
def train_fast_rcnn(model, dataloader, optimizer, num_epochs):
model.train()
for epoch in range(num_epochs):
for images, targets in dataloader:
optimizer.zero_grad()
# 模型前向传播
cls_scores, bbox_preds = model(images, targets['rois'])
# 计算损失
loss = fast_rcnn_loss(cls_scores, bbox_preds, targets)
# 反向传播和优化
loss.backward()
optimizer.step()
print(f"Epoch [{epoch+1}/{num_epochs}], Loss: {loss.item():.4f}")5.5 使用示例
# 假设我们有一个数据加载器 dataloader
# num_classes 是目标类别的数量
num_classes = 21 # 例如,20 个物体类别 + 1 个背景类别
model = FastRCNN(num_classes)
optimizer = torch.optim.SGD(model.parameters(), lr=0.001, momentum=0.9)
# 训练模型
train_fast_rcnn(model, dataloader, optimizer, num_epochs=10)6. 结论
Fast R-CNN 的出现是目标检测领域的重要里程碑,通过加速特征提取和优化分类与回归过程,提高了检测的精度和效率。其后缀模型,如 Faster R-CNN 和 Mask R-CNN 继续在此基础上进行改进,推动了深度学习在目标检测领域的广泛应用。


















 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











