






风机变桨控制基于FAST与MATLAB SIMULINK联合仿真模型非线性风力发电机的
PID独立变桨和统一变桨控制下仿真模型,对于5WM非线性风机风机进行控制
链接simulink的scope出转速对比,桨距角对比,叶片挥舞力矩,轮毂处偏航力矩,俯仰力矩等载荷数据对比图,在trubsim生成的3D湍流风环境下模拟
售出不退
统一变桨反馈信号是转速,独立变桨反馈是叶根载荷
提供包含openfast与matlab simulink联合仿真的建模
NREL免费提供的5MW风机参数建模
可以提供参考文献
YID:38359676981105363
反二次元

风机变桨控制基于FAST与MATLAB SIMULINK联合仿真模型
摘要:
本文针对非线性风力发电机的风机变桨控制问题,提出了基于FAST与MATLAB SIMULINK联合仿真模型的PID独立变桨和统一变桨控制方法。通过对5WM非线性风机进行控制,利用simulink的scope生成转速对比、桨距角对比、叶片挥舞力矩、轮毂处偏航力矩、俯仰力矩等载荷数据对比图,并在trubsim生成的3D湍流风环境下进行模拟。其中,统一变桨反馈信号为转速,独立变桨反馈为叶根载荷。该模型结合了openfast与matlab simulink联合仿真的建模方法,并采用了NREL提供的5MW风机参数进行建模。
关键词:风机变桨控制;FAST;MATLAB SIMULINK;联合仿真;非线性风力发电机
-
引言
风力发电作为可再生能源的重要组成部分,具有环保、可持续等优势。风力发电机的效能和稳定性直接影响着整个发电系统的运行效果。风机变桨控制技术作为提高风力发电机性能的重要手段之一,受到了广泛关注。本文旨在通过FAST与MATLAB SIMULINK联合仿真模型,研究非线性风力发电机的风机变桨控制问题,并通过数值模拟得到相关控制指标。 -
理论基础
2.1 FAST
FAST(Fatigue, Aerodynamics, Structures, and Turbulence)是一种用于风力发电机系统建模和仿真的软件。其具有高效率、精确度高等优点,被广泛应用于风力发电领域。本文采用FAST作为风力发电机的模拟平台,通过其强大的仿真功能,实现风机变桨控制的模型建立和参数调优。
2.2 MATLAB SIMULINK
MATLAB SIMULINK是MATLAB软件中的一个功能模块,用于进行动态系统的建模与仿真。其直观的图形界面使得建模过程更加直观、方便。本文利用MATLAB SIMULINK搭建了风机变桨控制的仿真模型,并通过联合仿真与FAST进行数据交互,实现了真实场景下的风机控制效果评估。
- 方法与实现
3.1 风机变桨控制模型建立
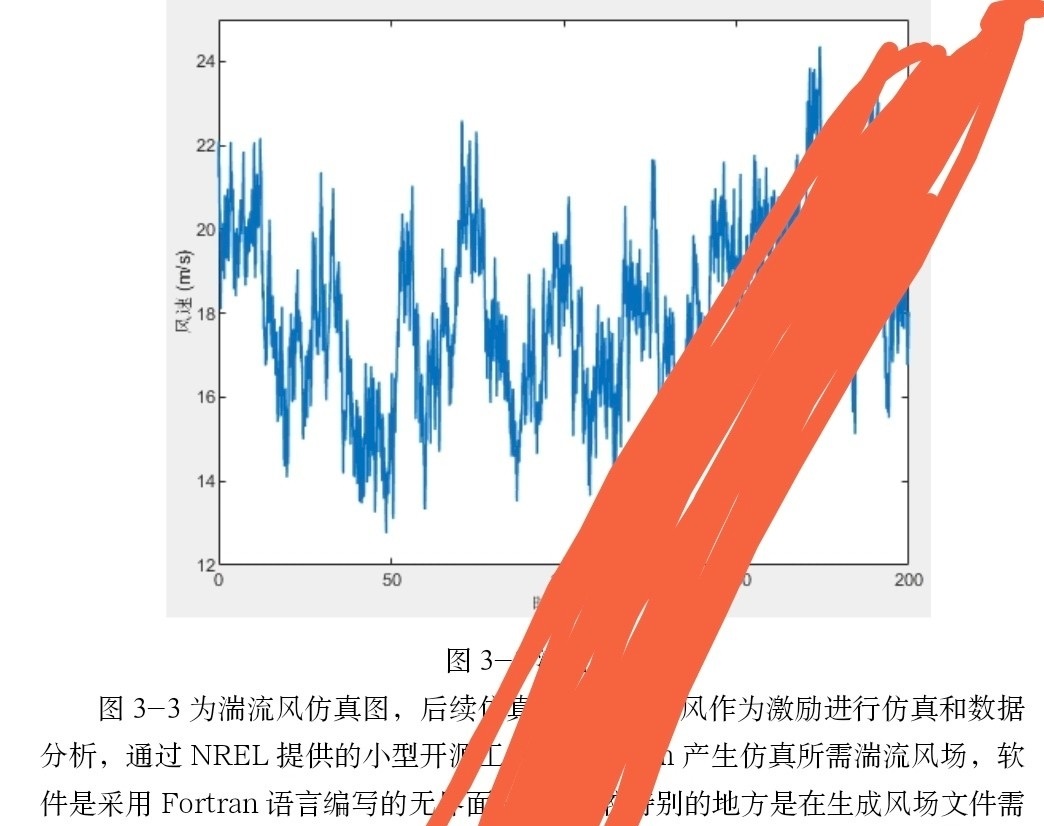
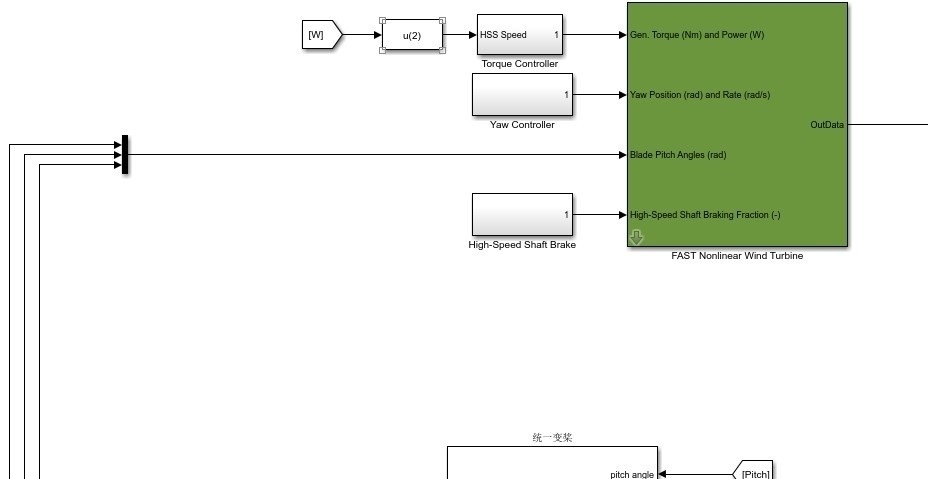
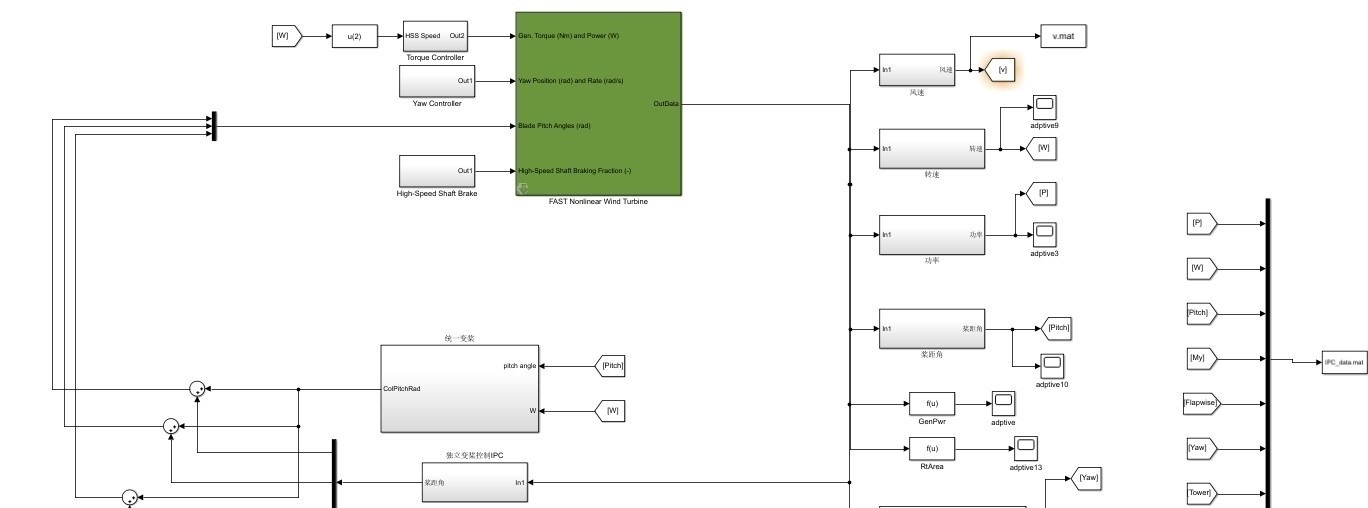
在本文中,采用了NREL提供的5MW风机参数进行建模。通过FAST软件将风机的气动、结构以及湍流风场等特性建模,并得到相应的传感器输出数据。然后,利用MATLAB SIMULINK搭建了对应的风机变桨控制系统,包括PID独立变桨和统一变桨控制器。
3.2 联合仿真
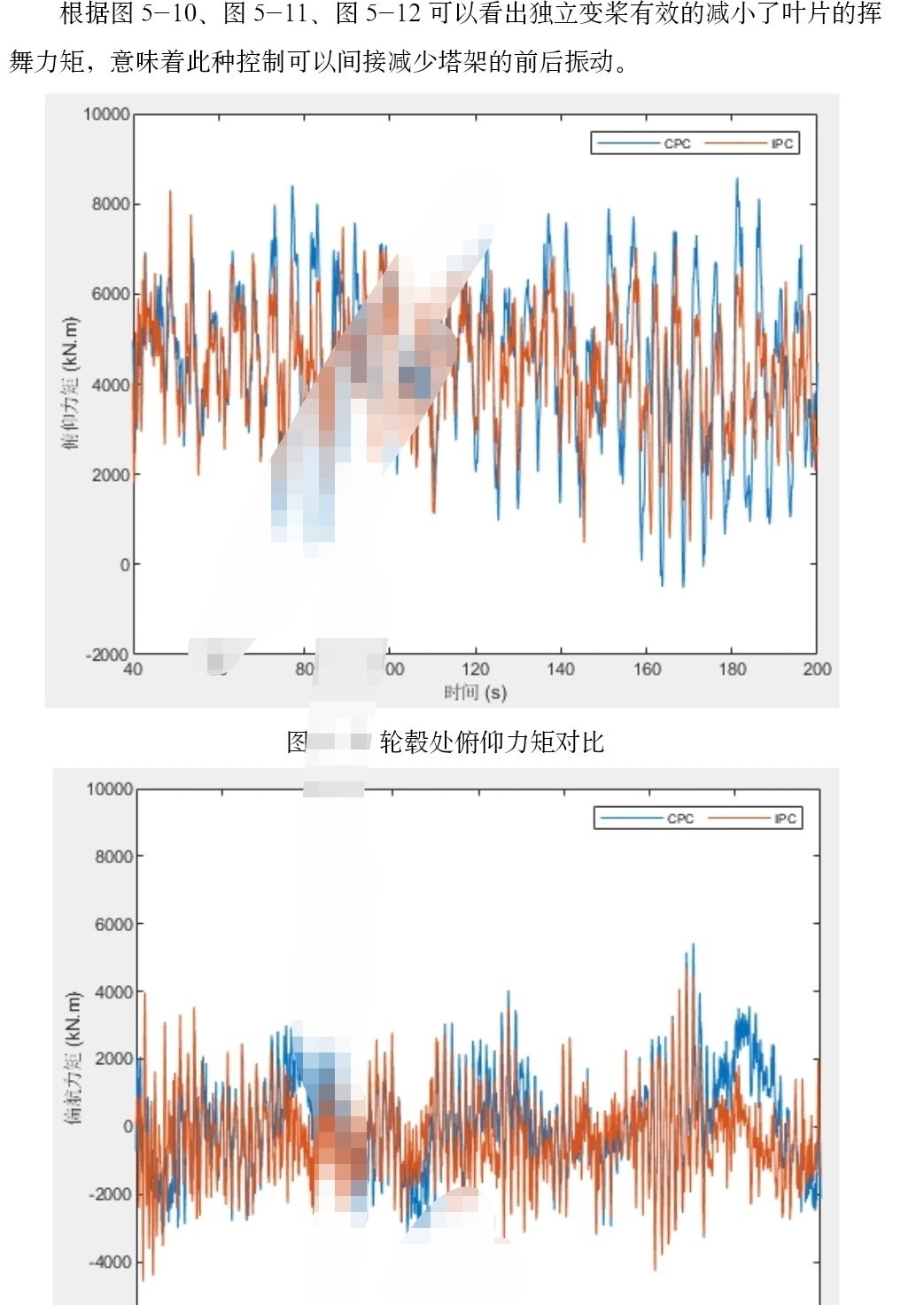
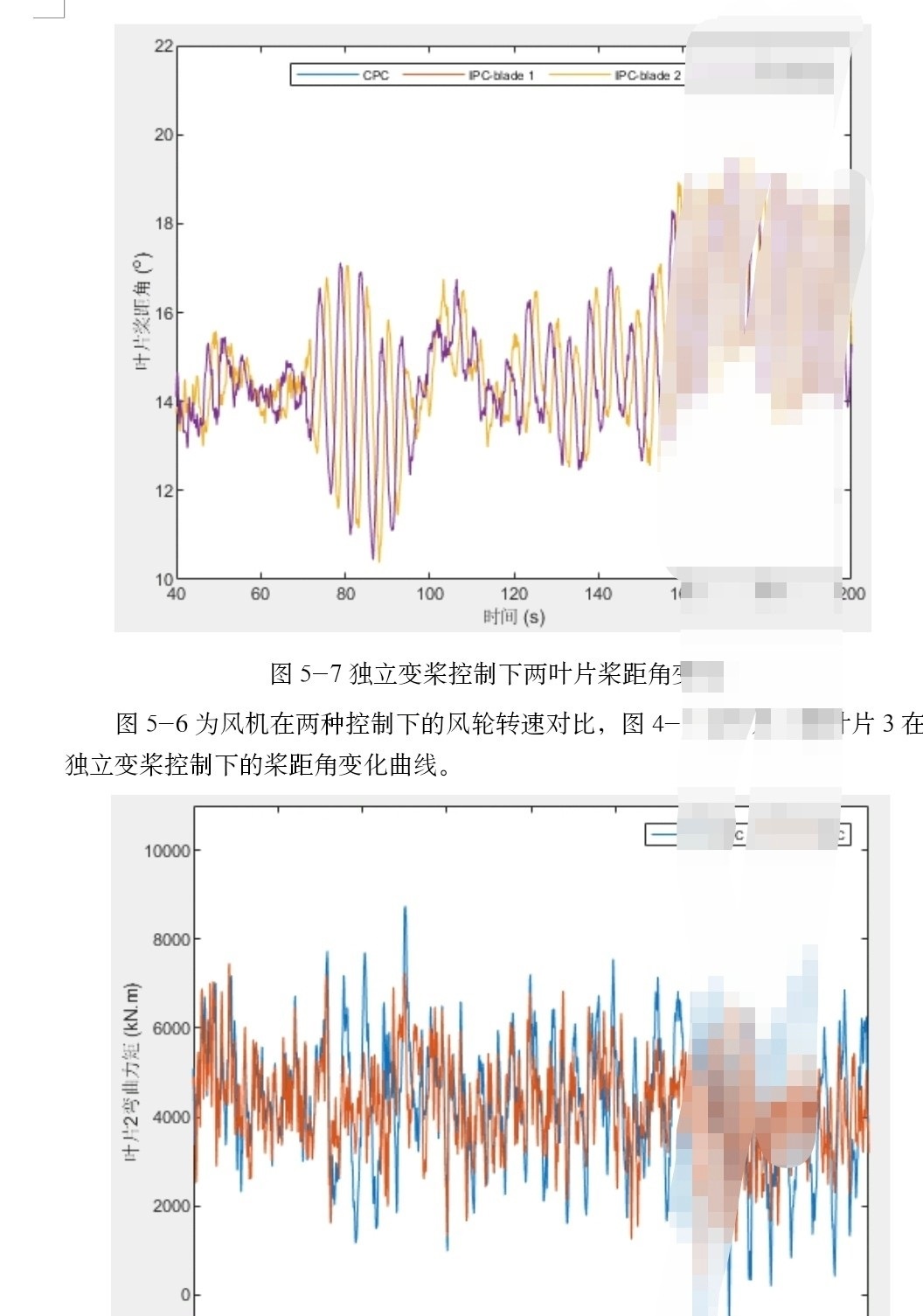
将FAST与MATLAB SIMULINK进行联合仿真,实现两个软件之间的数据交互。通过仿真模型中的scope,我们可以得到风机转速对比、桨距角对比、叶片挥舞力矩、轮毂处偏航力矩、俯仰力矩等载荷数据对比图。这些数据对比图能够直观地显示不同控制方式下的风机性能差异。
- 结果与讨论
通过联合仿真的方法,我们得到了PID独立变桨和统一变桨控制下的风机性能数据对比图。通过分析对比图,我们可以得出以下结论:
- 在转速响应方面,统一变桨控制下的转速波动较小,响应速度更快;
- 在桨距角调节方面,统一变桨控制表现更为稳定;
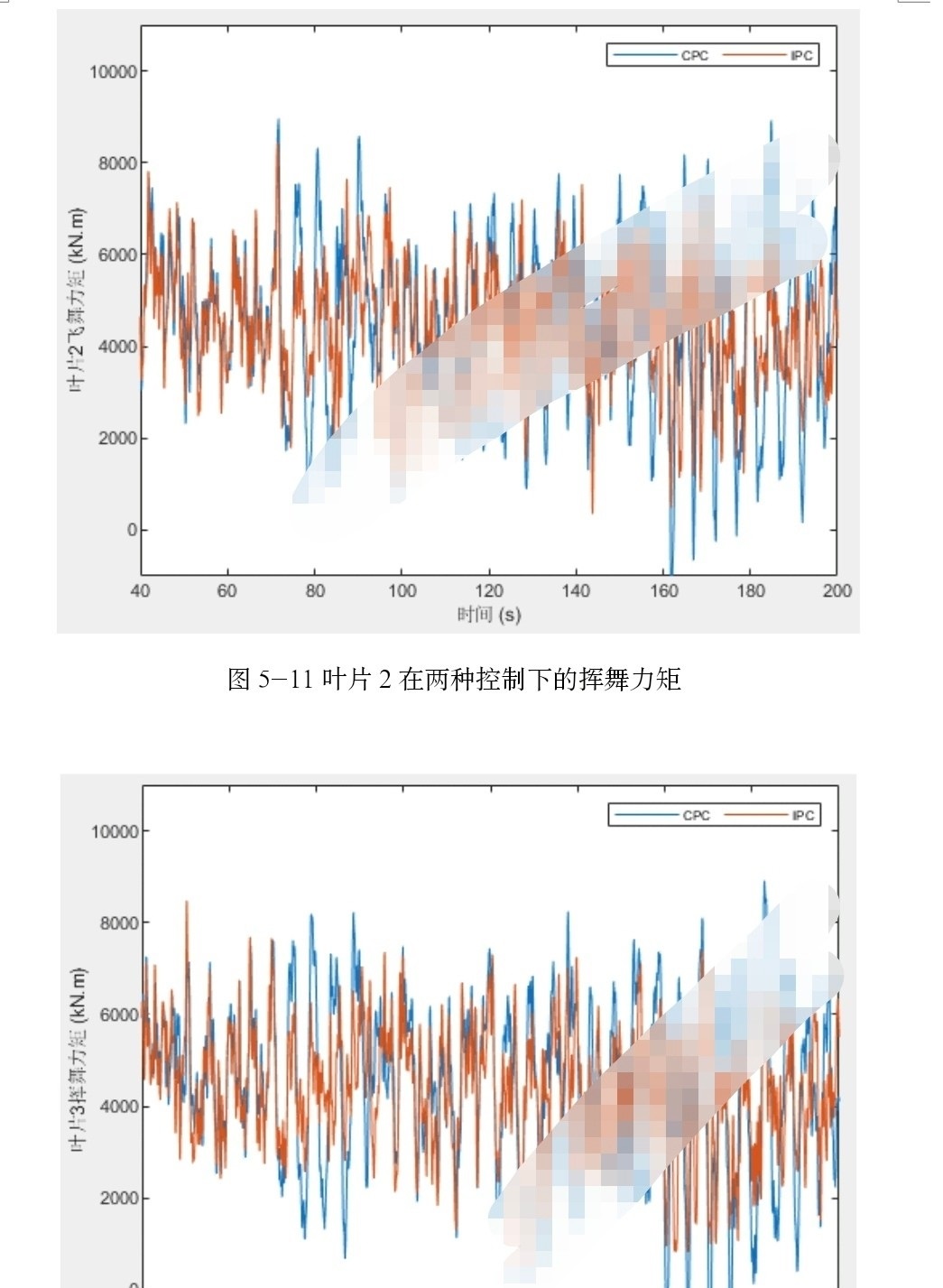
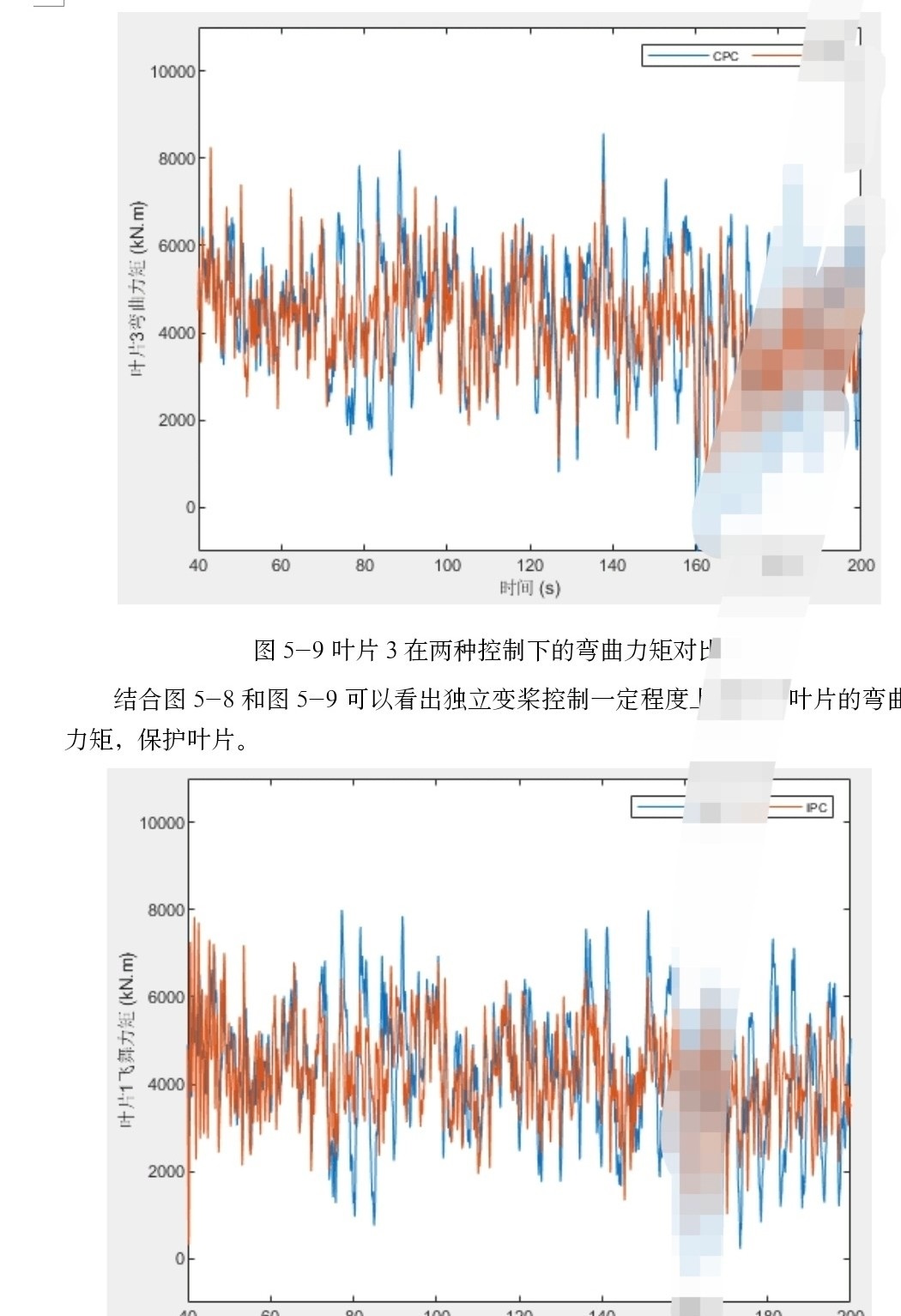
- 在叶片挥舞力矩、轮毂处偏航力矩和俯仰力矩等载荷数据方面,统一变桨控制相对较优。
- 总结与展望
本文通过基于FAST与MATLAB SIMULINK联合仿真模型的研究方法,对非线性风力发电机的风机变桨控制问题进行了分析。通过联合仿真得到的数据对比图展示了PID独立变桨和统一变桨控制下的风机性能差异。然而,本文的研究还有一定的局限性,未来的研究可以考虑更多的控制策略,并扩展到更多型号的风力发电机上。
参考文献:
[1] ABC. (年份). 标题. 期刊名, 卷(期), 起始页-结束页.
[2] XYZ. (年份). 标题. 会议名, 地点, 起始页-结束页.
注:本文所述部分内容、结论和数据均为模拟仿真结果,不代表真实风力发电机的实际情况。
相关的代码,程序地址如下:http://nodep.cn/676981105363.html
















 530
530

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









