






六轴EtherCAT总线伺服涂布收卷机程序,采用六个伺服+变频器+编码器,动态测量频率,计算转速,再换算频率,用变频器同步伺服电机速度,进行通讯控制,具备一定参考价值。
YID:8648646232955542
大白1号


六轴EtherCAT总线伺服涂布收卷机程序是一种基于六个伺服、变频器和编码器的控制系统,该系统能够对涂布收卷机进行精确的控制和监测。本文将详细介绍该程序的设计原理和实现方法,并分析其在工业应用中的参考价值。
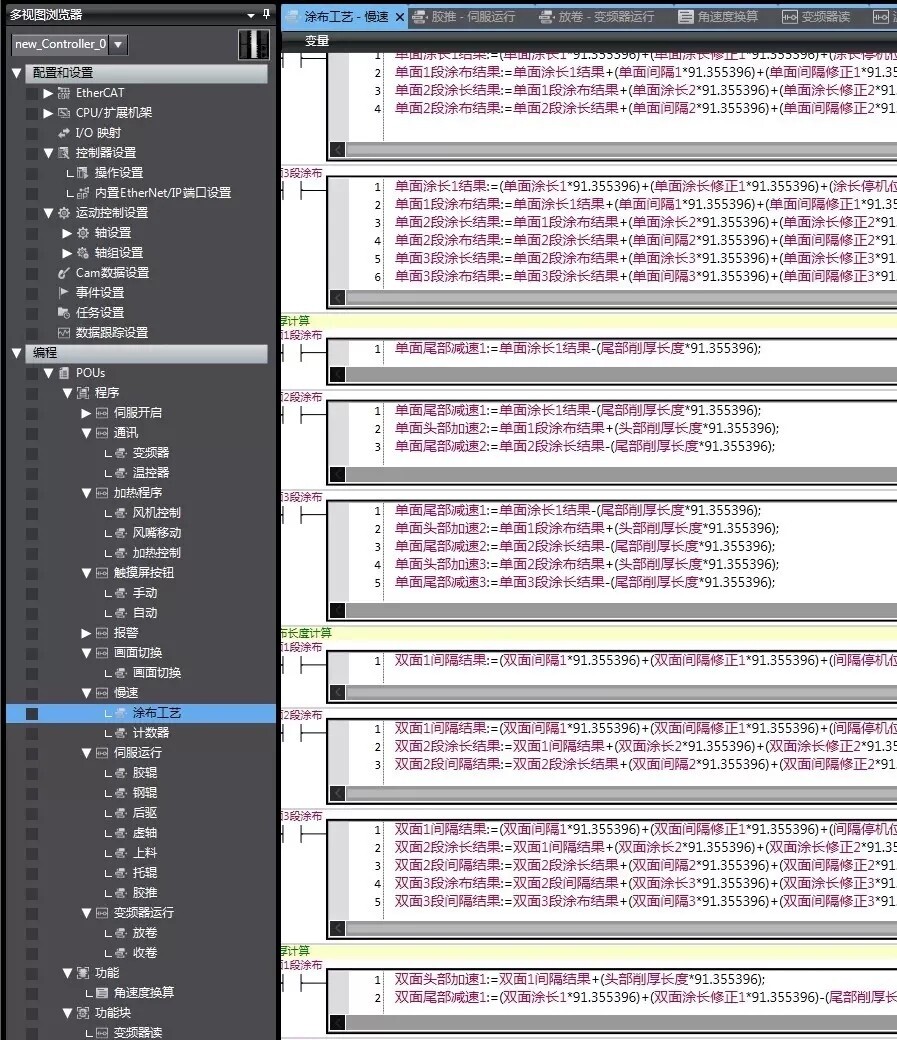
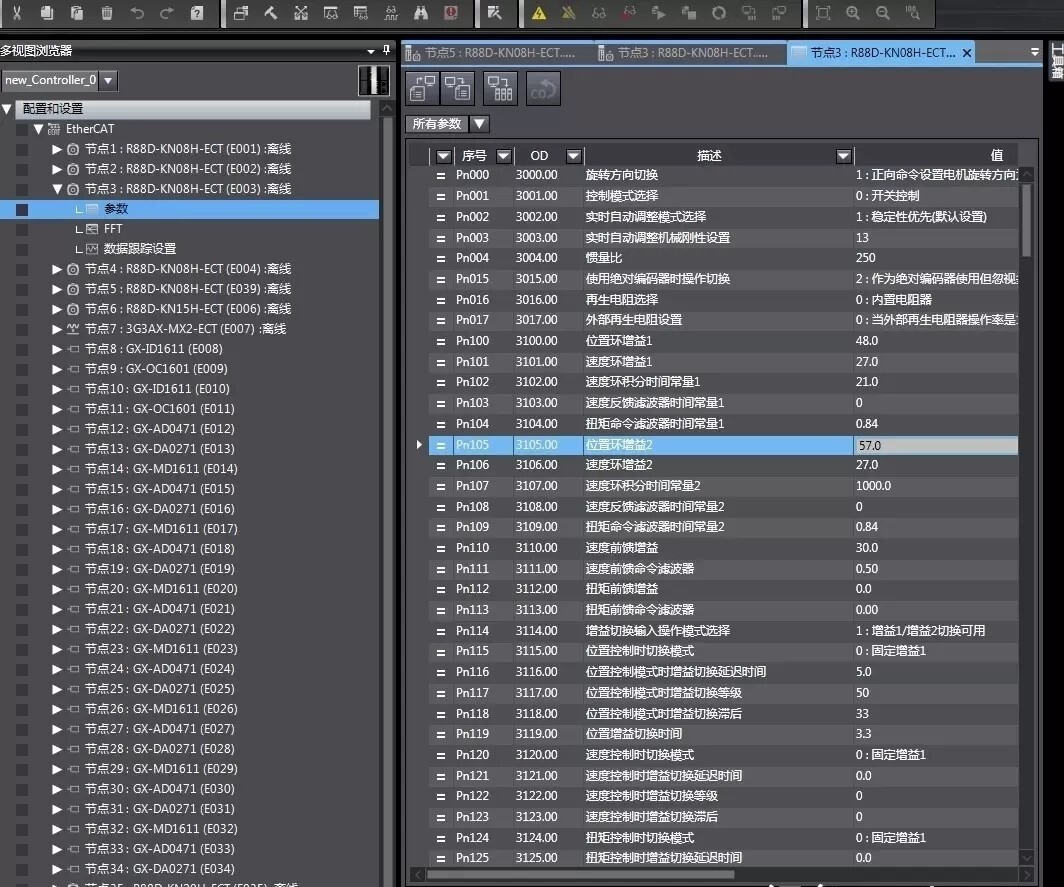
首先,要了解六轴EtherCAT总线伺服涂布收卷机程序是如何实现的,我们需要明确其关键组件和工作原理。该程序采用六个伺服电机来控制涂布收卷机的运动,其中每个伺服电机都配备了变频器和编码器。编码器用于动态测量电机的转速,而变频器则负责将转速转换为频率信号。通过使用EtherCAT总线作为通信介质,实现了伺服电机之间的同步。
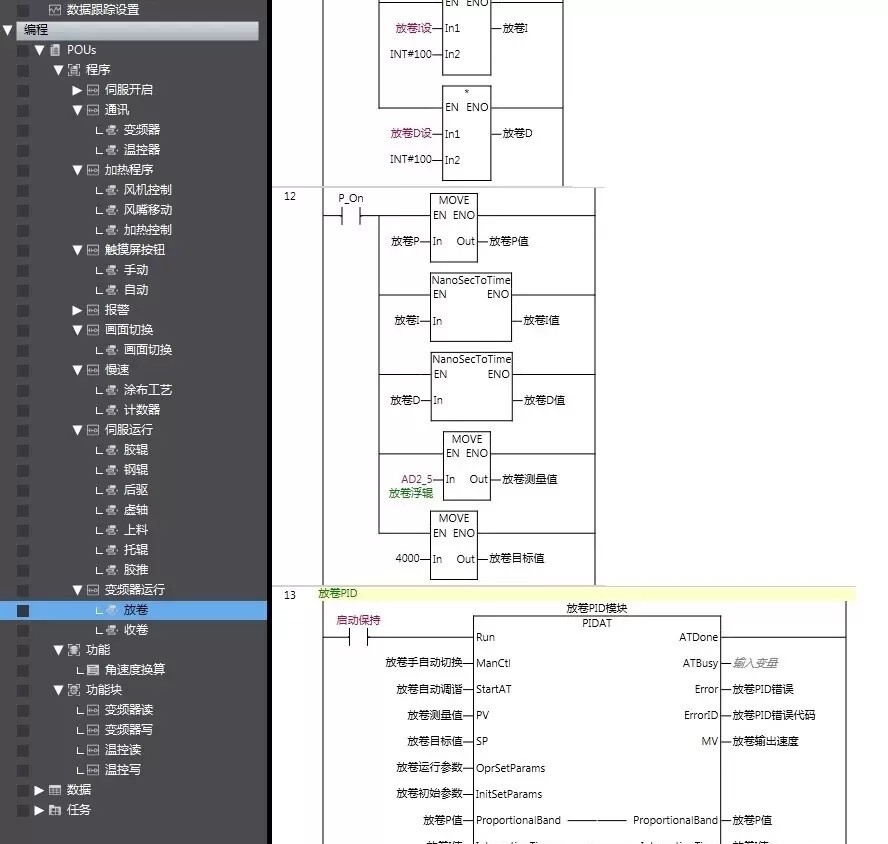
在程序的设计过程中,需要考虑到涂布收卷机的运动过程和控制需求。涂布收卷机需要在涂布过程中保持恒定的速度,并能够根据需要调整运动轨迹。因此,在程序设计中,我们需要实时监测伺服电机的转速,并根据实际情况进行动态调整。为了实现这一功能,可以使用PID控制算法来实现伺服电机的速度控制。通过对编码器的读数进行实时比较,并根据反馈信号进行修正,可以确保涂布收卷机运动的稳定性和准确性。
另外,为了实现伺服电机之间的同步运动,我们需要使用EtherCAT总线作为通信介质。EtherCAT总线是一种高实时性的现场总线,具有较低的通信延迟和较高的数据传输速率。通过使用EtherCAT总线,我们可以实现多个伺服电机之间的同步控制,保证涂布收卷机运动的一致性和稳定性。在程序设计中,我们需要编写相应的通信协议和数据处理算法,以实现伺服电机之间的数据传输和同步控制。
六轴EtherCAT总线伺服涂布收卷机程序具备一定的参考价值。首先,该程序采用了先进的控制技术和通信技术,能够实现对涂布收卷机运动的精确控制和监测。其采用的PID控制算法和EtherCAT通信协议在工业应用中已经得到广泛应用,具有较高的稳定性和可靠性。其次,该程序的设计思路和实现方法可以为其他类似控制系统的设计提供借鉴和参考。通过学习和理解该程序的设计原理,我们可以更好地理解和应用先进的控制和通信技术,提升系统的性能和可靠性。
综上所述,六轴EtherCAT总线伺服涂布收卷机程序是一种采用先进的控制和通信技术实现的涂布收卷机控制系统。其设计原理和实现方法具有一定的参考价值,并且在工业应用中已经得到验证。通过对该程序的学习和理解,我们可以更好地应用和推广先进的控制和通信技术,提升系统的性能和可靠性。
相关的代码,程序地址如下:http://imgcs.cn/646232955542.html
















 273
273

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









