







目录
0.接线设计
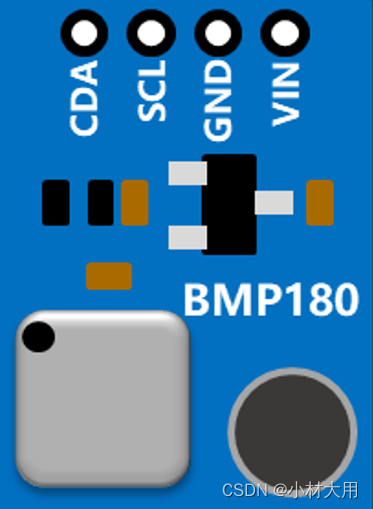
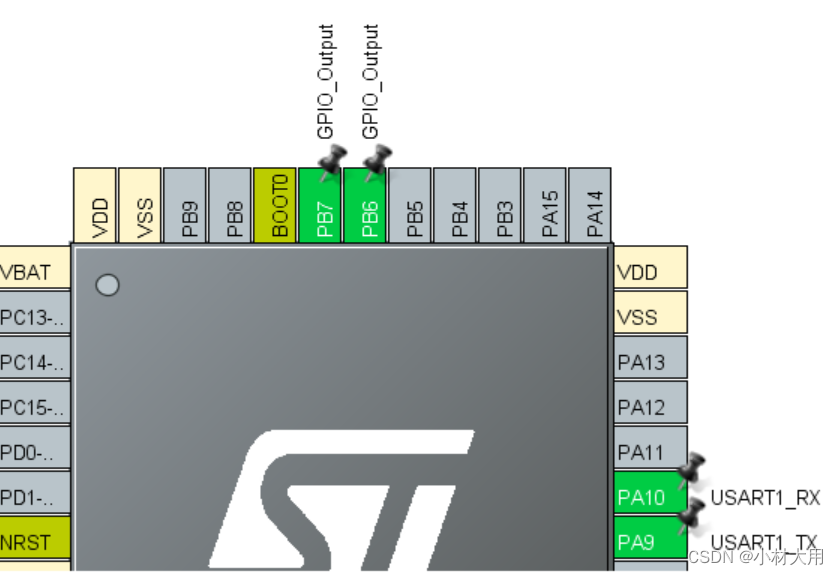
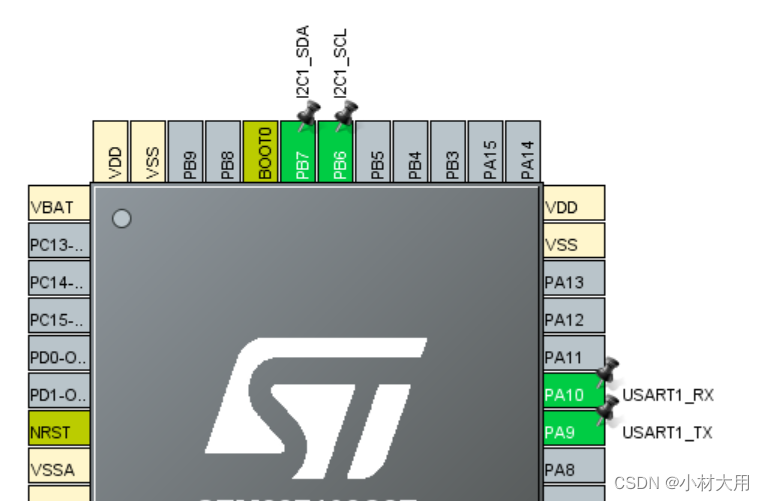
硬件接口:IIC_SCL -- PB6
IIC_SDA -- PB7
串口使用串口1:PA9和PA10
1.功能描述
通过STM32实现BMP180大气压传感器模块数据采集,并将采集的数据在串口显示。
本传感器支持IIC通信,实物图如下:
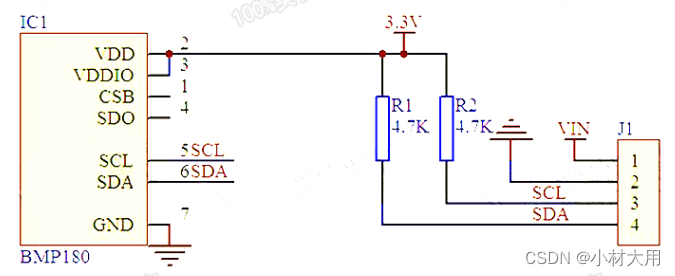
网上建议在SCL和SDA引脚上,上拉两个4.7K电阻,保证通信稳定,但我实现没有增加这两个电阻,通信正常,可能也有不稳定情况,大家自行判断。我没有上拉电阻,信息采集正常。
2.四种方式实现大气压采集
1)标准库模拟IIC实现气压值采集;
2)标准库硬件IIC实现气压值采集;
3)HAL库模拟IIC实现气压值采集;
4)HAL库硬件IIC实现气压值采集。
3.模块选择
·STM32F103C8T6(其它型号也是一样)
·BMP180气压传感器模块
·USB-TTL串口调试助手
4.编程环境
STM32CubeMX(工程可视化配置环境IDE,HAL库使用)
keil5(编程环境)
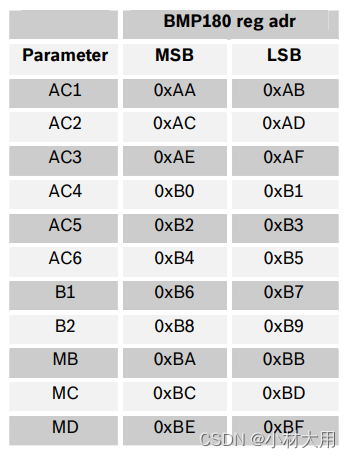
5.模块主要参数
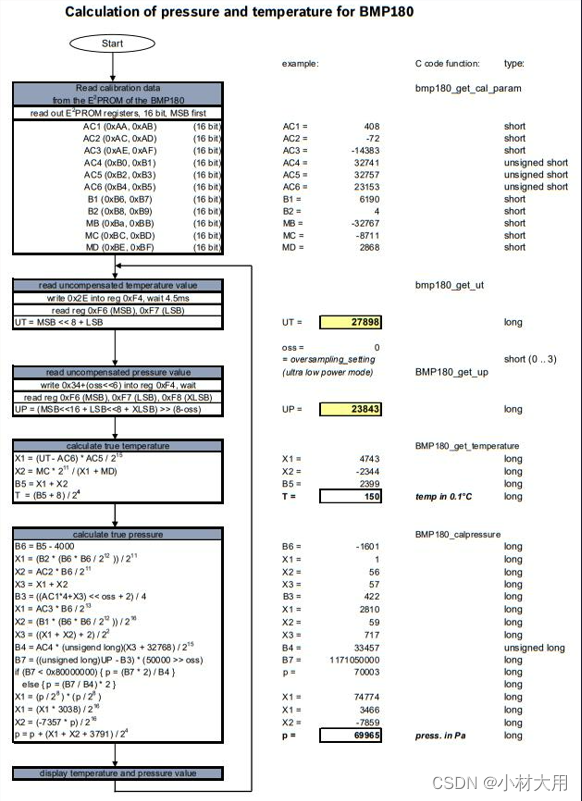
BMP180有一个产品文档,大家可以参考文档实现程序。
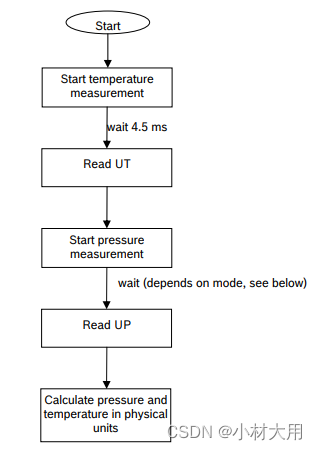
测量流程图。
温度和大气压测量:

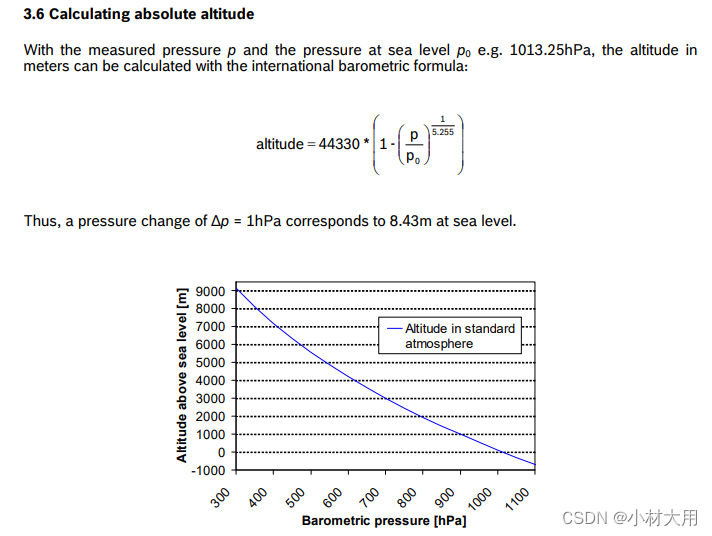
海拔测量:
6.代码实现
1)标准库模拟IIC实现气压值采集
//********************************************************************
u16 bmp180ReadTemp(void)
{
int cnt = 0;
IIC_Start(); //起始信号
IIC_Send_Byte(BMP180_SlaveAddress); //发送设备地址+写信号 BMP180_SlaveAddress 0xee 气压传感器器件地址
cnt = 0;
while(IIC_Wait_Ack()) //这边需要增加超时退出,避免卡死
{
cnt++;
delay_ms(1);
if(cnt>=100)return 1;
}
IIC_Send_Byte(0xF4); // write register address
cnt = 0;
while(IIC_Wait_Ack()) //这边需要增加超时退出,避免卡死
{
cnt++;
delay_ms(1);
if(cnt>=100)return 1;
}
IIC_Send_Byte(0x2E); // write register data for temp
cnt = 0;
while(IIC_Wait_Ack()) //这边需要增加超时退出,避免卡死
{
cnt++;
delay_ms(1);
if(cnt>=100)return 1;
}
IIC_Stop(); //发送停止信号
delay_ms(10); // max time is 4.5ms
return Multiple_read(0xF6);
}
//*************************************************************
u16 bmp180ReadPressure(void)
{
int cnt = 0;
IIC_Start(); //起始信号
IIC_Send_Byte(BMP180_SlaveAddress); //发送设备地址+写信号
cnt = 0;
while(IIC_Wait_Ack()) //这边需要增加超时退出,避免卡死
{
cnt++;
delay_ms(1);
if(cnt>=100)return 1;
}
IIC_Send_Byte(0xF4); // write register address
cnt = 0;
while(IIC_Wait_Ack()) //这边需要增加超时退出,避免卡死
{
cnt++;
delay_ms(1);
if(cnt>=100)return 1;
}
IIC_Send_Byte(0x34); // write register data for pressure
cnt = 0;
while(IIC_Wait_Ack()) //这边需要增加超时退出,避免卡死
{
cnt++;
delay_ms(1);
if(cnt>=100)return 1;
}
IIC_Stop(); //发送停止信号
delay_ms(20); // max time is 4.5ms
return Multiple_read(0xF6);//pressure;
}
//**************************************************************
//初始化BMP085,根据需要请参考pdf进行修改**************
void Init_BMP180()
{
IIC_Init();
ac1 = Multiple_read(0xAA);
ac2 = Multiple_read(0xAC);
ac3 = Multiple_read(0xAE);
ac4 = Multiple_read(0xB0);
ac5 = Multiple_read(0xB2);
ac6 = Multiple_read(0xB4);
b1 = Multiple_read(0xB6);
b2 = Multiple_read(0xB8);
mb = Multiple_read(0xBA);
mc = Multiple_read(0xBC);
md = Multiple_read(0xBE);
}
//***********************************************************************
void bmp180Convert()
{
unsigned int ut;
unsigned long up;
long x1, x2, b5, b6, x3, b3, p;
unsigned long b4, b7;
ut = bmp180ReadTemp(); // 读取温度
up = bmp180ReadPressure(); // 读取压强 return pressure;
//*************
x1 = (((long)ut - (long)ac6)*(long)ac5) >> 15;
x2 = ((long) mc << 11) / (x1 + md);
b5 = x1 + x2;
result_UT = ((b5 + 8) >> 4);
//*************
b6 = b5 - 4000;
// Calculate B3
x1 = (b2 * (b6 * b6)>>12)>>11;
x2 = (ac2 * b6)>>11;
x3 = x1 + x2;
b3 = (((((long)ac1)*4 + x3)<<OSS) + 2)>>2;
// Calculate B4
x1 = (ac3 * b6)>>13;
x2 = (b1 * ((b6 * b6)>>12))>>16;
x3 = ((x1 + x2) + 2)>>2;
b4 = (ac4 * (unsigned long)(x3 + 32768))>>15;
b7 = ((unsigned long)(up - b3) * (50000>>OSS));
if (b7 < 0x80000000)
p = (b7<<1)/b4;
else
p = (b7/b4)<<1;
x1 = (p>>8) * (p>>8);
x1 = (x1 * 3038)>>16;
x2 = (-7357 * p)>>16;
result_UP = p+((x1 + x2 + 3791)>>4);
}
/****************************************************************
函数名称:BMP085_Get_Altitude
函数功能:获取海拔高度值
入口参数:无
出口参数:altitude //int型 2字节,当前海拔高度值
备 注: 返回的高度值单位为厘米,调用时再换算成带小数的以米为单位的高度值
*****************************************************************/
double BMP085_Get_Altitude()
{
double altitude;
//pressure=(float)pressure; //获取气压值
altitude=44330.0*(1-pow((double)result_UP/101325,1/5.255)); //根据芯片手册提供的公式计算海拔高度
//altitude*=100; //转换成厘米单位的高度值,调用时再换算成带小数的高度值,提高精度
return altitude;
}
实现效果:
2)标准库硬件IIC实现气压值采集

//向EEPROM写入一个字节
int BMP180_Byte_Write(uint8_t addr,uint8_t data)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
while (I2C_GetFlagStatus(I2C1, I2C_FLAG_BUSY)) //检查I2C总线是否繁忙
{
if((I2CTimeout--) == 0) return 13;
}
//发送起始信号
I2C_GenerateSTART(BMP180_I2C,ENABLE);
//检测EV5事件
I2CTimeout = I2CT_LONG_TIMEOUT;
while( I2C_CheckEvent(BMP180_I2C,I2C_EVENT_MASTER_MODE_SELECT)==ERROR)
{
if((I2CTimeout--) == 0) return 14;
}
//发送设备写地址
I2C_Send7bitAddress(BMP180_I2C,BMP180_I2C_Address,I2C_Direction_Transmitter);
//检测EV6事件
I2CTimeout = I2CT_LONG_TIMEOUT;
while( I2C_CheckEvent(BMP180_I2C,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED)==ERROR)
{
if((I2CTimeout--) == 0) return 15;
}
//发送要操作设备内部的地址
I2C_SendData(BMP180_I2C,addr);
I2CTimeout = I2CT_LONG_TIMEOUT;
while( I2C_CheckEvent(BMP180_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTING )==ERROR)
{
if((I2CTimeout--) == 0) return 16;
}
I2C_SendData(BMP180_I2C,data);
//检测EV8_2事件
while( I2C_CheckEvent(BMP180_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTED )==ERROR);
//发送停止信号
I2C_GenerateSTOP(BMP180_I2C,ENABLE);
return 0;
}
//向EEPROM读取多个字节
uint32_t BMP180_Read(uint8_t *data,uint8_t addr,uint16_t Num_ByteToRead)
{
I2CTimeout = I2CT_LONG_TIMEOUT;
//判断IIC总线是否忙碌
while(I2C_GetFlagStatus(BMP180_I2C, I2C_FLAG_BUSY))
{
if((I2CTimeout--) == 0) return 1;
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送起始信号
I2C_GenerateSTART(BMP180_I2C,ENABLE);
//检测EV5事件
while( I2C_CheckEvent(BMP180_I2C,I2C_EVENT_MASTER_MODE_SELECT )==ERROR)
{
if((I2CTimeout--) == 0) return 7;
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送设备写地址
I2C_Send7bitAddress(BMP180_I2C,BMP180_I2C_Address,I2C_Direction_Transmitter);
//检测EV6事件等待从机应答
while( I2C_CheckEvent(BMP180_I2C,I2C_EVENT_MASTER_TRANSMITTER_MODE_SELECTED )==ERROR)
{
if((I2CTimeout--) == 0) return 8;
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送要操作设备内部存储器的地址
I2C_SendData(BMP180_I2C,addr);
//检测EV8事件
while( I2C_CheckEvent(BMP180_I2C,I2C_EVENT_MASTER_BYTE_TRANSMITTING )==ERROR)
{
if((I2CTimeout--) == 0) return 9;
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送起始信号
I2C_GenerateSTART(BMP180_I2C,ENABLE);
//检测EV5事件
while( I2C_CheckEvent(BMP180_I2C,I2C_EVENT_MASTER_MODE_SELECT )==ERROR)
{
if((I2CTimeout--) == 0) return 10;
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//发送设备读地址
I2C_Send7bitAddress(BMP180_I2C,BMP180_I2C_Address+1,I2C_Direction_Receiver);
//检测EV6事件
while( I2C_CheckEvent(BMP180_I2C,I2C_EVENT_MASTER_RECEIVER_MODE_SELECTED )==ERROR)
{
if((I2CTimeout--) == 0) return 11;
}
while(Num_ByteToRead--)
{
//是否是最后一个字节,若是则发送非应答信号
if( Num_ByteToRead==0)
{
//发送非应答信号
I2C_AcknowledgeConfig(BMP180_I2C,DISABLE);
//发送停止信号
I2C_GenerateSTOP(BMP180_I2C,ENABLE);
}
I2CTimeout = I2CT_FLAG_TIMEOUT;
//检测EV7事件
while( I2C_CheckEvent(BMP180_I2C,I2C_EVENT_MASTER_BYTE_RECEIVED )==ERROR)
{
if((I2CTimeout--) == 0) return 12;
}
*data=I2C_ReceiveData(BMP180_I2C);
data++;
}
//重新开启应答信号
I2C_AcknowledgeConfig(BMP180_I2C,ENABLE);
return 0;
}
void BMP180_Init(void)
{
u8 msb, lsb;
delay_ms(200); // 1s,这里的延时很重要,上电后延时,没有错误的冗余设计
BMP180_Read(&msb,0xAA,1);
BMP180_Read(&lsb,0xAB,1);
ac1 = (msb << 8)|lsb;
BMP180_Read(&msb,0xAC,1);
BMP180_Read(&lsb,0xAD,1);
ac2 = (msb << 8)|lsb;
BMP180_Read(&msb,0xAE,1);
BMP180_Read(&lsb,0xAF,1);
ac3 = (msb << 8)|lsb;
BMP180_Read(&msb,0xB0,1);
BMP180_Read(&lsb,0xB1,1);
ac4 = (msb << 8)|lsb;
BMP180_Read(&msb,0xB2,1);
BMP180_Read(&lsb,0xB3,1);
ac5 = (msb << 8)|lsb;
BMP180_Read(&msb,0xB4,1);
BMP180_Read(&lsb,0xB5,1);
ac6 = (msb << 8)|lsb;
BMP180_Read(&msb,0xB6,1);
BMP180_Read(&lsb,0xB7,1);
b1 = (msb << 8)|lsb;
BMP180_Read(&msb,0xB8,1);
BMP180_Read(&lsb,0xB9,1);
b2 = (msb << 8)|lsb;
BMP180_Read(&msb,0xBA,1);
BMP180_Read(&lsb,0xBB,1);
mb = (msb << 8)|lsb;
BMP180_Read(&msb,0xBC,1);
BMP180_Read(&lsb,0xBD,1);
mc = (msb << 8)|lsb;
BMP180_Read(&msb,0xBE,1);
BMP180_Read(&lsb,0xBF,1);
md = (msb << 8)|lsb;
}
//********************************************************************
u16 bmp180ReadTemp(void)
{
u8 msb, lsb;
//BMP180_Byte_Write(BMP180_SlaveAddress); //发送设备地址+写信号 BMP180_SlaveAddress 0xee 气压传感器器件地址
BMP180_Byte_Write(0xF4,0x2E);
//BMP180_Byte_Write(0x2E);
delay_ms(20); // max time is 4.5ms
BMP180_Read(&msb,0xF6,1);
BMP180_Read(&lsb,0xF7,1);
return (msb << 8)|lsb;
}
//*************************************************************
u16 bmp180ReadPressure(void)
{
u8 msb, lsb;
//BMP180_Byte_Write(BMP180_SlaveAddress); //发送设备地址+写信号
BMP180_Byte_Write(0xF4,0x34); // write register address
//BMP180_Byte_Write(0x34); // write register data for pressure
delay_ms(20); // max time is 4.5ms
BMP180_Read(&msb,0xF6,1);
BMP180_Read(&lsb,0xF7,1);
return (msb << 8)|lsb;
}
实现效果:
3)HAL库模拟IIC实现气压值采集
//********************************************************************
uint16_t bmp180ReadTemp(void)
{
int cnt = 0;
BMP180_Start(); //起始信号
BMP180_SendByte(BMP180_SlaveAddress); //发送设备地址+写信号 BMP180_SlaveAddress 0xee 气压传感器器件地址
cnt = 0;
while(BMP180_RecvACK()) //这边需要增加超时退出,避免卡死
{
cnt++;
Delay_mms(1);
if(cnt>=100)return 1;
}
BMP180_SendByte(0xF4); // write register address
cnt = 0;
while(BMP180_RecvACK()) //这边需要增加超时退出,避免卡死
{
cnt++;
Delay_mms(1);
if(cnt>=100)return 1;
}
BMP180_SendByte(0x2E); // write register data for temp
cnt = 0;
while(BMP180_RecvACK()) //这边需要增加超时退出,避免卡死
{
cnt++;
Delay_mms(1);
if(cnt>=100)return 1;
}
BMP180_Stop(); //发送停止信号
Delay_mms(10); // max time is 4.5ms
return Multiple_read(0xF6);
}
//*************************************************************
uint16_t bmp180ReadPressure(void)
{
int cnt = 0;
BMP180_Start(); //起始信号
BMP180_SendByte(BMP180_SlaveAddress); //发送设备地址+写信号
cnt = 0;
while(BMP180_RecvACK()) //这边需要增加超时退出,避免卡死
{
cnt++;
Delay_mms(1);
if(cnt>=100)return 1;
}
BMP180_SendByte(0xF4); // write register address
cnt = 0;
while(BMP180_RecvACK()) //这边需要增加超时退出,避免卡死
{
cnt++;
Delay_mms(1);
if(cnt>=100)return 1;
}
BMP180_SendByte(0x34); // write register data for pressure
cnt = 0;
while(BMP180_RecvACK()) //这边需要增加超时退出,避免卡死
{
cnt++;
Delay_mms(1);
if(cnt>=100)return 1;
}
BMP180_Stop(); //发送停止信号
Delay_mms(20); // max time is 4.5ms
return Multiple_read(0xF6);//pressure;
}
//初始化BMP180,根据需要请参考pdf进行修改**************
void Init_BMP180()
{
char str[100] = "";
ac1 = Multiple_read(0xAA);
ac2 = Multiple_read(0xAC);
ac3 = Multiple_read(0xAE);
ac4 = Multiple_read(0xB0);
ac5 = Multiple_read(0xB2);
ac6 = Multiple_read(0xB4);
b1 = Multiple_read(0xB6);
b2 = Multiple_read(0xB8);
mb = Multiple_read(0xBA);
mc = Multiple_read(0xBC);
md = Multiple_read(0xBE);
sprintf(str,"ac1=%d ac2=%d ac3=%d ac4=%d ac5=%d ac6=%d b1=%d b2=%d mb=%d mc=%d md=%d\r\n",(int)ac1,(int)ac2,(int)ac3,(int)ac4,(int)ac5,(int)ac6,(int)b1,(int)b2,(int)mb,(int)mc,(int)md);
HAL_UART_Transmit(&huart1, (uint8_t *)str, (uint8_t)strlen(str), 5000);
}
//***********************************************************************
void bmp180Convert()
{
unsigned int ut;
unsigned long up;
long x1, x2, b5, b6, x3, b3, p;
unsigned long b4, b7;
ut = bmp180ReadTemp(); // 读取温度
up = bmp180ReadPressure(); // 读取压强 return pressure;
//*************
x1 = (((long)ut - (long)ac6)*(long)ac5) >> 15;
x2 = ((long) mc << 11) / (x1 + md);
b5 = x1 + x2;
result_UT = ((b5 + 8) >> 4);
//*************
b6 = b5 - 4000;
// Calculate B3
x1 = (b2 * (b6 * b6)>>12)>>11;
x2 = (ac2 * b6)>>11;
x3 = x1 + x2;
b3 = (((((long)ac1)*4 + x3)<<OSS) + 2)>>2;
// Calculate B4
x1 = (ac3 * b6)>>13;
x2 = (b1 * ((b6 * b6)>>12))>>16;
x3 = ((x1 + x2) + 2)>>2;
b4 = (ac4 * (unsigned long)(x3 + 32768))>>15;
b7 = ((unsigned long)(up - b3) * (50000>>OSS));
if (b7 < 0x80000000)
p = (b7<<1)/b4;
else
p = (b7/b4)<<1;
x1 = (p>>8) * (p>>8);
x1 = (x1 * 3038)>>16;
x2 = (-7357 * p)>>16;
result_UP = p+((x1 + x2 + 3791)>>4);
}
/****************************************************************
函数名称:BMP085_Get_Altitude
函数功能:获取海拔高度值
入口参数:无
出口参数:altitude //int型 2字节,当前海拔高度值
备 注: 返回的高度值单位为厘米,调用时再换算成带小数的以米为单位的高度值
*****************************************************************/
//double BMP085_Get_Altitude()
//{
// double altitude;
// //pressure=(float)pressure; //获取气压值
// altitude=44330.0*(1-pow((double)pressure/101325,1/5.255)); //根据芯片手册提供的公式计算海拔高度
// //altitude*=100; //转换成厘米单位的高度值,调用时再换算成带小数的高度值,提高精度
// return altitude;
//}实现效果:

4)HAL库硬件IIC实现气压值采集
// 在从设备指定内存中写数据
void BMP180_WR_CMD(uint8_t cmd,uint8_t data)
{
//HAL_I2C_Master_Transmit(&hi2c1, BMP180_I2C_Address, &cmd,1, 0x100);
HAL_I2C_Mem_Write(&hi2c1, BMP180_I2C_Address, cmd, I2C_MEMADD_SIZE_8BIT, &data, 1, 0x100);
//HAL_I2C_Master_Transmit(I2C_HandleTypeDef *hi2c, uint16_t DevAddress, uint8_t *pData, uint16_t Size, uint32_t Timeout);
//HAL_I2C_Mem_Write(&hi2c1 ,0x46,0x00,I2C_MEMADD_SIZE_8BIT,&cmd,1,0x100);
}
//读数据
void BMP180_READ_DATA(uint8_t cmd,uint8_t *data,uint16_t size)
{
HAL_I2C_Master_Transmit(&hi2c1, BMP180_I2C_Address, &cmd,size, 0x100);
HAL_I2C_Master_Receive(&hi2c1, BMP180_I2C_Address+1, data,size, 0x100);
}
/**
@brief BH1750初始化函数
@param 无
@return 无
*/
void BMP180_Init(void)
{
char str[100] = "";
uint8_t msb, lsb;
HAL_Delay(200); // 1s,这里的延时很重要,上电后延时,没有错误的冗余设计
BMP180_READ_DATA(0xAA,&msb,1);
BMP180_READ_DATA(0xAB,&lsb,1);
ac1 = (msb << 8)|lsb;
BMP180_READ_DATA(0xAC,&msb,1);
BMP180_READ_DATA(0xAD,&lsb,1);
ac2 = (msb << 8)|lsb;
BMP180_READ_DATA(0xAE,&msb,1);
BMP180_READ_DATA(0xAF,&lsb,1);
ac3 = (msb << 8)|lsb;
BMP180_READ_DATA(0xB0,&msb,1);
BMP180_READ_DATA(0xB1,&lsb,1);
ac4 = (msb << 8)|lsb;
BMP180_READ_DATA(0xB2,&msb,1);
BMP180_READ_DATA(0xB3,&lsb,1);
ac5 = (msb << 8)|lsb;
BMP180_READ_DATA(0xB4,&msb,1);
BMP180_READ_DATA(0xB5,&lsb,1);
ac6 = (msb << 8)|lsb;
BMP180_READ_DATA(0xB6,&msb,1);
BMP180_READ_DATA(0xB7,&lsb,1);
b1 = (msb << 8)|lsb;
BMP180_READ_DATA(0xB8,&msb,1);
BMP180_READ_DATA(0xB9,&lsb,1);
b2 = (msb << 8)|lsb;
BMP180_READ_DATA(0xBA,&msb,1);
BMP180_READ_DATA(0xBB,&lsb,1);
mb = (msb << 8)|lsb;
BMP180_READ_DATA(0xBC,&msb,1);
BMP180_READ_DATA(0xBD,&lsb,1);
mc = (msb << 8)|lsb;
BMP180_READ_DATA(0xBE,&msb,1);
BMP180_READ_DATA(0xBF,&lsb,1);
md = (msb << 8)|lsb;
sprintf(str,"ac1=%d ac2=%d ac3=%d ac4=%d ac5=%d ac6=%d b1=%d b2=%d mb=%d mc=%d md=%d\r\n",(int)ac1,(int)ac2,(int)ac3,(int)ac4,(int)ac5,(int)ac6,(int)b1,(int)b2,(int)mb,(int)mc,(int)md);
HAL_UART_Transmit(&huart1, (uint8_t *)str, (uint8_t)strlen(str), 5000);
}
uint16_t bmp180ReadTemp(void)
{
uint8_t msb, lsb;
//发送设备地址+写信号 BMP180_SlaveAddress 0xee 气压传感器器件地址
BMP180_WR_CMD(0xF4,0x2E);
HAL_Delay(20); // max time is 4.5ms
BMP180_READ_DATA(0xF6,&msb,1);
BMP180_READ_DATA(0xF7,&lsb,1);
return (msb << 8)|lsb;
}
//*************************************************************
uint16_t bmp180ReadPressure(void)
{
uint8_t msb, lsb;
//发送设备地址+写信号
BMP180_WR_CMD(0xF4,0x34);
HAL_Delay(20); // max time is 4.5ms
BMP180_READ_DATA(0xF6,&msb,1);
BMP180_READ_DATA(0xF7,&lsb,1);
return (msb << 8)|lsb;
}
//***********************************************************************
void bmp180Convert()
{
unsigned int ut;
unsigned long up;
long x1, x2, b5, b6, x3, b3, p;
unsigned long b4, b7;
ut = bmp180ReadTemp(); // 读取温度
up = bmp180ReadPressure(); // 读取压强 return pressure;
//
x1 = (((long)ut - (long)ac6)*(long)ac5) >> 15;
x2 = ((long) mc << 11) / (x1 + md);
b5 = x1 + x2;
result_UT = ((b5 + 8) >> 4);
//
b6 = b5 - 4000;
// Calculate B3
x1 = (b2 * (b6 * b6)>>12)>>11;
x2 = (ac2 * b6)>>11;
x3 = x1 + x2;
b3 = (((((long)ac1)*4 + x3)<<OSS) + 2)>>2;
// Calculate B4
x1 = (ac3 * b6)>>13;
x2 = (b1 * ((b6 * b6)>>12))>>16;
x3 = ((x1 + x2) + 2)>>2;
b4 = (ac4 * (unsigned long)(x3 + 32768))>>15;
b7 = ((unsigned long)(up - b3) * (50000>>OSS));
if (b7 < 0x80000000)
p = (b7<<1)/b4;
else
p = (b7/b4)<<1;
x1 = (p>>8) * (p>>8);
x1 = (x1 * 3038)>>16;
x2 = (-7357 * p)>>16;
result_UP = p+((x1 + x2 + 3791)>>4);
}实现效果:



















 6180
6180

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











