







拉伸信号处理
拉伸(Stretch)处理,也叫做"有源相关",通常用于处理带宽很宽LFM信号。这种处理技术如下图所示。
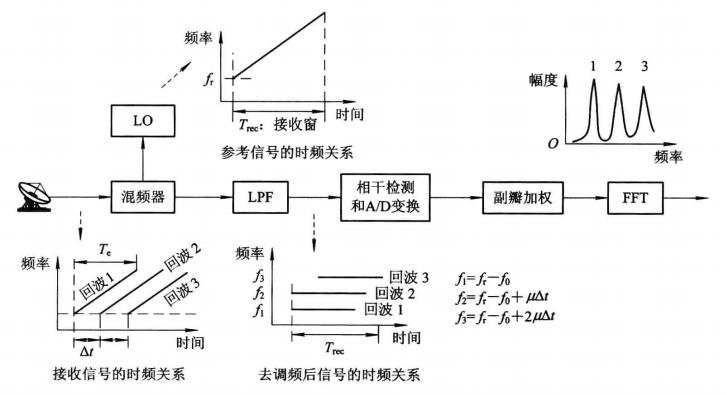
图中,给出了三个点目标或散射点的回波在处理过程中的视频变化关系示意图。其处理过程为:首先,雷达回波与一个发射信号波形的复制品(作为参考信号)混频;随后进行低通滤波和相干检波;再进行模数变换;最后,采用一组窄带滤波器(即FFT)进行谱分析,提取与目标距离成正比的频率信息。这种拉伸处理有效地将目标距离对应的时延转换成了频率,接收的相同距离单元上的回波信号产生了同样的频率。参考信号是一个LFM信号,具有与发射的LFM信号相同的线性调频斜率。参考信号存在于雷达的"接收窗"的持续时间内,而持续时间由雷达的最大和最小作用距离的差值计算得到。
拉伸处理与上一节介绍的LFM脉冲压缩处理的主要区别之一是参考信号不同,在上一节里采用单载频信号作为参考信号,因此采样速率要求为调频带宽的两倍。例如,若距离分辨率为0.3m,则要求调频带宽为500MHz,采样速率要求达到1GHz。而拉伸处理的采样速度主要取决于距离分辨率和接收窗的大小。接收窗的大小通常只有数千米甚至更小。
雷达的发射信号模型可以表示为
s 1 ( t ) = c o s ( 2 π f 0 t + π u t 2 ) s_1(t)=cos(2\pi f_0t+\pi ut^2) s1(t)=cos(2πf0t+πut2), 0 ≤ t ≤ T e 0 \le t \le T_e 0≤t≤Te
式中, u = B / T e u=B/T_e u=B/Te,为LFM斜率, B B B为调频带宽, T e T_e Te为脉冲宽度; f 0 f_0 f0为线性调频脉冲的起始频率。
假设距离为 R R R位置有一个散射体,雷达接收其回波的信号为
s r ( t ) = a c o s [ 2 π f 0 ( t − Δ τ ) + π u ( t − Δ τ ) 2 ] s_r(t)=acos[2 \pi f_0(t-\Delta \tau)+ \pi u(t-\Delta \tau)^2] sr(t)=acos[2πf0(t−Δτ)+πu(t−Δτ)2], 0 ≤ t − Δ τ ≤ T e 0 \le t-\Delta \tau \le T_e 0≤t−Δτ≤Te
式中,a为信号幅值,与目标RCS、距离、天线增益等有关; Δ τ = 2 R / c \Delta \tau = 2R/c Δτ=2R/c为时延。
混频器输入的参考信号为
s r e f ( t ) = c o s ( 2 π f 0 t + π u t 2 ) s_{ref}(t)=cos(2\pi f_0t+\pi ut^2) sref(t)=cos(2πf0t+πut2), 0 ≤ t ≤ T r e f 0 \le t \le T_{ref} 0≤t≤Tref
式中, T r e c = 2 ( R m a x − R m i n ) c = 2 R r e c c T_{rec}=\frac{2(R_{max}-R_{min})}{c}=\frac{2R_{rec}}{c} Trec=c2(Rmax−Rmin)=c2Rrec,为接收窗; f r 0 f_{r0} fr0为参考信号LFM的起始频率,通常令 f r 0 = f 0 f_{r0}=f_0 fr0=f0
接收信号与参考信号经混频、低通滤波后的复信号模型为
s 0 = a e [ j ( 2 π u Δ τ t + 2 π f 0 ( Δ τ ) 2 ) ] = a e [ j 4 π u R c t + j 2 R c ( 2 π f 0 − 2 π u R c ) ] s_0=a e^{[j(2\pi u \Delta \tau t + 2\pi f_0 (\Delta \tau)^2)]}=a e^{[j\frac{4\pi uR}{c} t + j \frac{2R}{c}(2\pi f_0-\frac{2\pi u R}{c})]} s0=ae[j(2πuΔτt+2πf0(Δτ)2)]=ae[jc4πuRt+jc2R(2πf0−c2πuR)]
该信号的瞬时频率为
f i = 1 2 π d d t [ 4 π u R c t + 2 R c ( 2 π f 0 − 2 π u R c ) ] = 2 u R c f_i=\frac{1}{2\pi} \frac{d}{dt}[\frac{4\pi u R}{c}t+\frac{2R}{c}(2\pi f_0-\frac{2\pi u R}{c})]=\frac{2uR}{c} fi=2π1dtd[c4πuRt+c2R(2πf0−c2πuR)]=c2uR
上式表明,目标的距离与瞬时频率成正比。所以,对接收信号进行采样并对采样序列进行FFT,在频率为 f i f_i fi的峰值位置对应的目标距离为
R = f i c 2 u = f i c T e 2 B R=\frac{f_i c}{2u}=\frac{f_i cT_e}{2B} R=2ufic=2BficTe
假设距离为 R 1 、 R 2 、 … 、 R I R_1、R_2、…、R_I R1、R2、…、RI处有I个目标,因此,总的接收信号可表示为
s 0 ( t ) = ∑ i = 1 I a i e [ j 4 π u R i c t + j 2 R i c ( 2 π f 0 − 2 π u R i c ) ] s_0(t)=\sum_{i=1}^{I}a_ie^{[j\frac{4\pi uR_i}{c} t + j \frac{2R_i}{c}(2\pi f_0-\frac{2\pi u R_i}{c})]} s0(t)=∑i=1Iaie[jc4πuRit+jc2Ri(2πf0−c2πuRi)]
由此可见,不同距离的目标回波出现在不同的频率上。上图中给出了三个目标的回波信号示意图,对应的频率分别为 f 1 、 f 2 、 f 3 f_1、f_2、f_3 f1、f2、f3。为了在FFT后能区分开不同的频率,下面主要讨论采样率和FFT点数确定方法。
N点FFT的频率分辨率用 Δ f \Delta f Δf表示。假设两个相邻的点散射体的距离为 R 1 R_1 R1和 R 2 R_2 R2,距离间隔为 Δ R = R 2 − R 1 \Delta R=R_2-R_1 ΔR=R2−R1,可以分辨这些散射体的最小频率间隔 Δ f \Delta f Δf为
Δ f = f 2 − f 1 = 2 u c ( R 2 − R 1 ) = 2 u c Δ R \Delta f = f_2-f_1=\frac{2u}{c}(R_2-R_1)=\frac{2u}{c} \Delta R Δf=f2−f1=c2u(R2−R1)=c2uΔR
将 Δ R = c / ( 2 B ) \Delta R=c/(2B) ΔR=c/(2B)代入上式,得
Δ f = 2 B c T e c 2 B = 1 T e \Delta f = \frac{2B}{cT_e}\frac{c}{2B}=\frac{1}{T_e} Δf=cTe2B2Bc=Te1
由于N点FFT可分辨的最大频率限制在 − + N Δ f / 2 ^+_- N\Delta f/2 −+NΔf/2最大可分辨频率为
N Δ f 2 > 2 B ( R m a x − R m i n ) c T e = 2 B R r e c c T e \frac{N\Delta f}{2}>\frac{2B(R_{max}-R_{min})}{cT_e}=\frac{2BR_{rec}}{cT_e} 2NΔf>cTe2B(Rmax−Rmin)=cTe2BRrec
由 T r e c = 2 ( R m a x − R m i n ) c = 2 R r e c c T_{rec}=\frac{2(R_{max}-R_{min})}{c}=\frac{2R_{rec}}{c} Trec=c2(Rmax−Rmin)=c2Rrec
得到, N > 2 B T r e c N>2BT_{rec} N>2BTrec
因此,选取FFT的点数为
N F F T = 2 m ≥ N > 2 B T r e c N_{FFT}=2^{m} \ge N > 2BT_{rec} NFFT=2m≥N>2BTrec
m是一个非零的正整数。于是,采样间隔为
T s = 1 Δ f ∙ N F F T ≤ T e Δ R T r e c c T_s=\frac{1}{\Delta f \bullet N_{FFT}} \le \frac{T_e \Delta R}{T_{rec}c} Ts=Δf∙NFFT1≤TreccTeΔR
仿真实验
实验1:
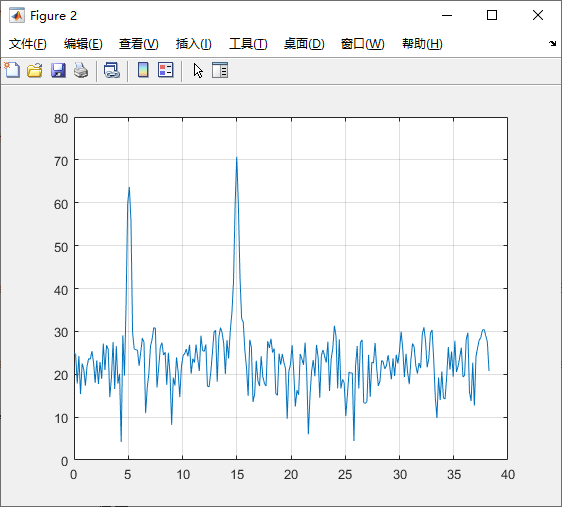
目标相对距离:[5,6.5,15]m,速度:[0,0,0]m/s
代码:
Tp = 10e-3; % 调频周期
Bm = 1e9; %调频带宽
R0 = [5,6.5,15]; %目标相对于Rmin的距离矢量(在接收窗内)
Vr = [0,0,0]; %目标的速度矢量
SNR = [10,10,20]; %目标的信噪比矢量
Rmin = 15e3; %采样的最小距离
Rrec = 30; %接收距离窗的大小
f0 = 5.6e9; %载频
mu = Bm / Tp; %调频斜率
c = 3e8;
dltR = c / (2 * Bm);
Trec = 2 * Rrec / c;
N = 2 * Bm * Trec;
m = ceil(log2(N));
Nfft = 2 ^ m;
Ts = Tp / Nfft;
tl = (0:Nfft-1) * Ts;
Window = kaiser(Nfft, pi).';
sp = (0.707 * (randn(1,Nfft) + 1i * randn(1,Nfft)));
for k = 1:length(R0)
tao = 2 * (R0(k) - Vr(k) * tl) / c;
spt = (10^(SNR(k)/20))*exp(1i*(2*pi*mu*tao.*tl + (2*pi*f0-pi*mu*tao) .* tao)); %信号
sp = sp + spt; %信号+噪声
end
y = (abs(fft(sp .* Window, Nfft)));
figure;
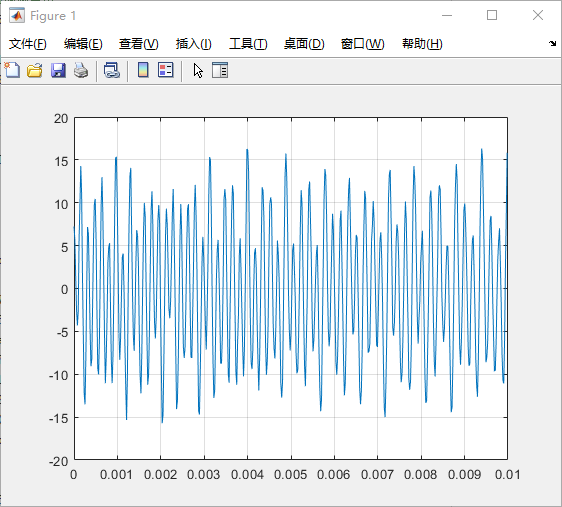
plot(tl,real(sp));
grid;
figure;
plot((0:Nfft/2 - 1) * dltR, 20 * log10(y(1:Nfft/2)));
grid;
实验结果:
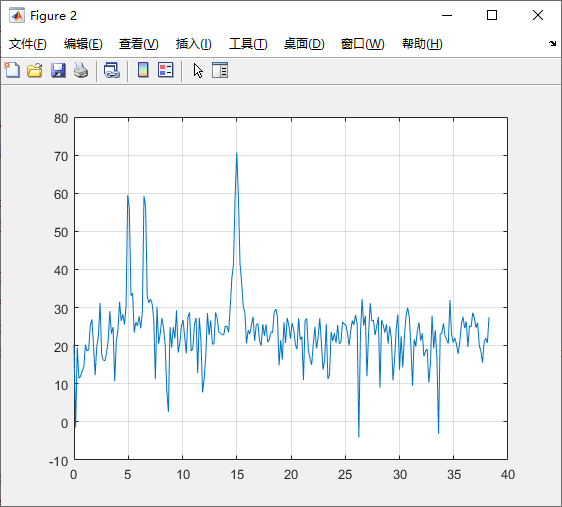
从实验结果可以看出,3个目标可以被分辨
实验2:
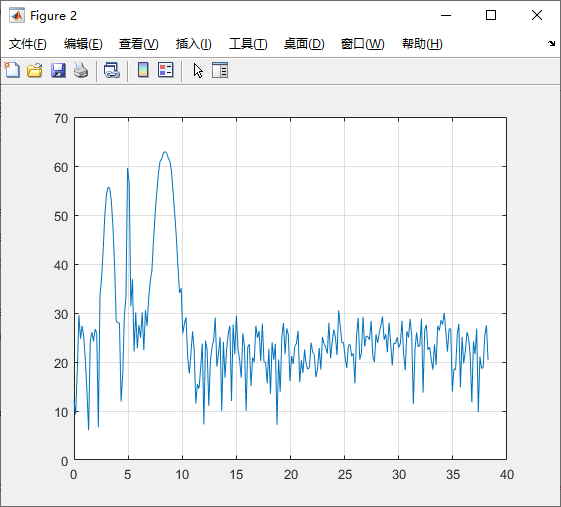
目标相对距离:[5,5.15,15]m,速度:[0,0,0]m/s
代码:
Tp = 10e-3; % 调频周期
Bm = 1e9; %调频带宽
R0 = [5,5.15,15]; %目标相对于Rmin的距离矢量(在接收窗内)
Vr = [0,0,0]; %目标的速度矢量
SNR = [10,10,20]; %目标的信噪比矢量
Rmin = 15e3; %采样的最小距离
Rrec = 30; %接收距离窗的大小
f0 = 5.6e9; %载频
mu = Bm / Tp; %调频斜率
c = 3e8;
dltR = c / (2 * Bm);
Trec = 2 * Rrec / c;
N = 2 * Bm * Trec;
m = ceil(log2(N));
Nfft = 2 ^ m;
Ts = Tp / Nfft;
tl = (0:Nfft-1) * Ts;
Window = kaiser(Nfft, pi).';
sp = (0.707 * (randn(1,Nfft) + 1i * randn(1,Nfft)));
for k = 1:length(R0)
tao = 2 * (R0(k) - Vr(k) * tl) / c;
spt = (10^(SNR(k)/20))*exp(1i*(2*pi*mu*tao.*tl + (2*pi*f0-pi*mu*tao) .* tao)); %信号
sp = sp + spt; %信号+噪声
end
y = (abs(fft(sp .* Window, Nfft)));
figure;
plot(tl,real(sp));
grid;
figure;
plot((0:Nfft/2 - 1) * dltR, 20 * log10(y(1:Nfft/2)));
grid;
实验结果:
从实验结果可以看出,尽管理论上距离分辨率为 Δ R = c / ( 2 B m ) = 0.15 m \Delta R = c/(2B_m) = 0.15m ΔR=c/(2Bm)=0.15m,但由于FFT加窗后主瓣展宽,使得两个目标相距0.15m就不能分辨开
实验3:
代码:
Tp = 10e-3; % 调频周期
Bm = 1e9; %调频带宽
R0 = [5,6.5,15]; %目标相对于Rmin的距离矢量(在接收窗内)
Vr = [0,50,100]; %目标的速度矢量
SNR = [10,10,20]; %目标的信噪比矢量
Rmin = 15e3; %采样的最小距离
Rrec = 30; %接收距离窗的大小
f0 = 5.6e9; %载频
mu = Bm / Tp; %调频斜率
c = 3e8;
dltR = c / (2 * Bm);
Trec = 2 * Rrec / c;
N = 2 * Bm * Trec;
m = ceil(log2(N));
Nfft = 2 ^ m;
Ts = Tp / Nfft;
tl = (0:Nfft-1) * Ts;
Window = kaiser(Nfft, pi).';
sp = (0.707 * (randn(1,Nfft) + 1i * randn(1,Nfft)));
for k = 1:length(R0)
tao = 2 * (R0(k) - Vr(k) * tl) / c;
spt = (10^(SNR(k)/20))*exp(1i*(2*pi*mu*tao.*tl + (2*pi*f0-pi*mu*tao) .* tao)); %信号
sp = sp + spt; %信号+噪声
end
y = (abs(fft(sp .* Window, Nfft)));
figure;
plot(tl,real(sp));
grid;
figure;
plot((0:Nfft/2 - 1) * dltR, 20 * log10(y(1:Nfft/2)));
grid;
实验结果:
从实验结果可以看出,由于速度的影响,两个目标的距离发生了位移且主瓣被展宽,因此,Stretch处理前需要对目标的速度进行补偿
参考文献:
- 《现代雷达系统分析与设计》,陈伯孝


















 1389
1389

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











