







SPI通信
一. 1.SPI简介:
-
SPI 是一种
高速,全双工,同步串行总线。 -
SPI 有主从俩种模式通常由一个主设备和一个或者多个从设备组从。SPI不支持多主机。
-
SPI通信至少需要四根线,分别是
MISO(主设备数据输入,从设备输出),MOSI(主设数据输出从设备输入),SCLK(时钟信号),CS/SS(片选信号)。 -
8位或16位数据帧格式
连接方式:

2.工作模式:
极性和相位
SPI 的极性(polarity)和相位 (phase)一般写为 CPOL和CPHA,即
CPOL(时钟极性):clock Polarity,CPHA(时钟相位) :Clock Phase
CPOL:表示时钟信号的初始电平状态。为 0表示时钟信号初始电平状态为低电平。为 1表示时钟信号初始电平状态为高电平。
CPHA:表示在第几个时钟跳变沿采样数据。为0表示在第一个时钟时钟跳变沿采样数据为1表示在第二个时钟跳变沿采样数据。
CPOL高/低--------CPHA高/低组成SPI的四种工作模式
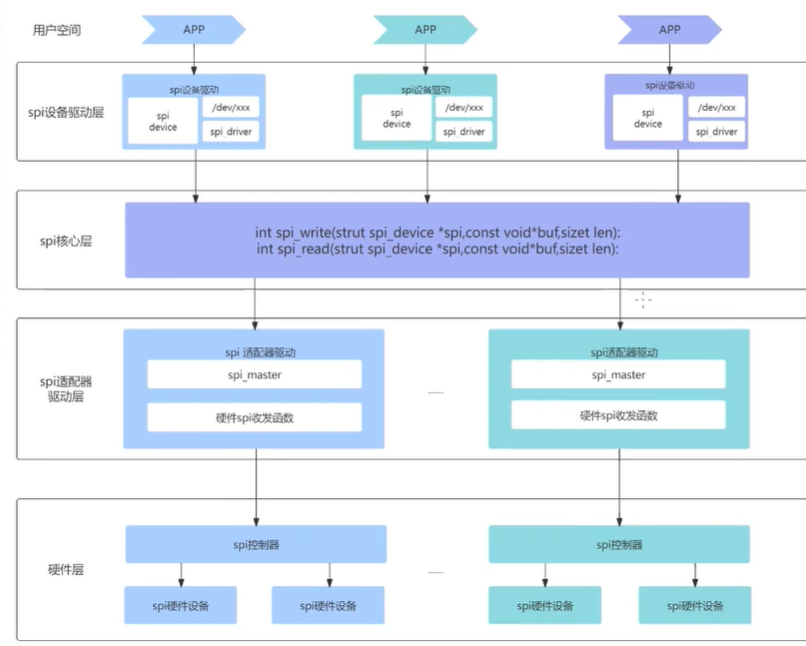
二.SPI驱动框架图:
三.SPI的Device和Driver部分:
1.Devices部分使用设备树创建节点:
driver部分与设备树的匹配方式,需要先遍历设备树中是否有描述SPI设备的子节点,当发现节点信息是,会向内核中注册Device信息。
在注册Device时,会处理SPI的设备节点信息,判断必要的设备信息是否存在:
在遍历节点信息时,会判断设备树的节点信息中是否有Device speed和Device speed信息是否存在:否则spi_dev_put(spi);会释放刚添加的Device
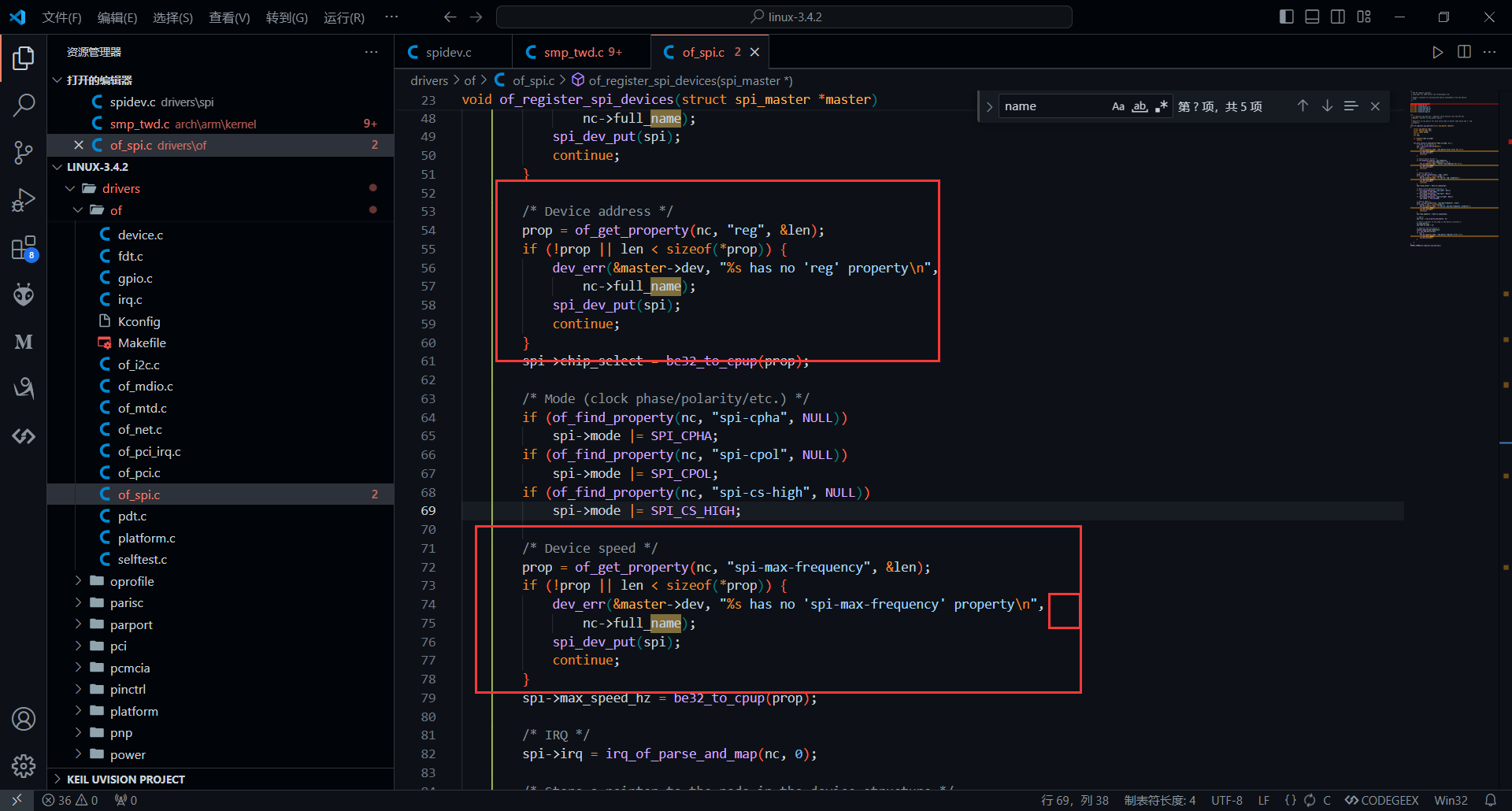
/* Device address */
prop = of_get_property(nc, "reg", &len);
if (!prop || len < sizeof(*prop)) {
dev_err(&master->dev, "%s has no 'reg' property\n",
nc->full_name);
spi_dev_put(spi);
continue;
}
spi->chip_select = be32_to_cpup(prop);
/* Mode (clock phase/polarity/etc.) */
if (of_find_property(nc, "spi-cpha", NULL))
spi->mode |= SPI_CPHA;
if (of_find_property(nc, "spi-cpol", NULL))
spi->mode |= SPI_CPOL;
if (of_find_property(nc, "spi-cs-high", NULL))
spi->mode |= SPI_CS_HIGH;
/* Device speed */
prop = of_get_property(nc, "spi-max-frequency", &len);
if (!prop || len < sizeof(*prop)) {
dev_err(&master->dev, "%s has no 'spi-max-frequency' property\n",
nc->full_name);
spi_dev_put(spi);
continue;
}
所以在添加设备树节点时,需要添加必要的两个信息即为:片选地址和通信速度:
&spi0 {
status = "okay";
mcp2515:mcp2515@0{
compatible = "my-mcp2515";
/*片选*/
reg = <0>;
/*速度,不能超过50M*/
spi-max-frequency = <24000000>;
}
}
2.Driver部分:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/spi/spi.h>
static int spi_driver_probe(struct spi_device *spi)
{
printk("This is SPI driver probe\n");
return 0;
}
static int spi_driver_remove(struct spi_device *spi){
return 0;
}
static const struct of_device_id spi_driver_of_match_table[] = {
{.compatible = "my-mcp2515"},
{},
}
const struct spi_device_id spi_driver_id_table[] = {{"spi_driver"}, {}}
struct spi_driver spi_driver = {
.driver = {
.name = "spi_driver",
.owner = THIS_MODULE,
.of_match_table = spi_driver_of_match_table,
},
.probe = spi_driver_probe,
.remove = spi_driver_remove,
.id_table = spi_driver_id_table,
}
static int __init
spi_driver_init(void)
{
int ret = 0;
ret = spi_register_driver(&spi_driver);
if (ret != 0)
{
printk(KERN_ERR "Failed to unregister spi driver\n");
}
return 0;
}
static void __exit spi_driver_exit(void)
{
spi_unregister_driver(&spi_driver);
}
module_init(spi_driver_init);
module_exit(spi_driver_exit);
MODULE_LICENSE("GPL");
3.完善Driver部分,在probe中使用字符设备框架添加设备控制节点(如果不需要与应用层交换数据,也可以不添加设备控制节点):
dev_t dev_num;
struct cdev mcp2515_cdev;
struct class *mcp2515_class;
struct device *mcp2515_device;
ssize_t mcp2515_read(struct file *file, char __user *buf, size_t size, loff_t *offset)
{
return 0;
}
ssize_t mcp2515_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{
return 0;
}
int mcp2515_open(struct inode *node, struct file *file)
{
return 0;
}
int mcp2515_release(struct inode *node, struct file *file)
{
return 0;
}
const struct file_operations spi_driver_fops = {
.owner = THIS_MODULE,
.open = mcp2515_open,
.read = mcp2515_read,
.write = mcp2515_write,
.release = mcp2515_release,
};
static int spi_driver_probe(struct spi_device *spi)
{
int ret = 0;
printk("This is SPI driver probe\n");
// 添加一个字符设备
// 分配一个字符设备区域,dev_num 为设备号,cnt 为数量, name 为名字
ret = alloc_chrdev_region(&dev_num, 0, 1, "my-mcp2515");
if (ret < 0)
{
printk(KERN_ERR "Failed to alloc_chrdev_region\n");
return ret;
}
// 初始化cdev
cdev_init(&mcp2515_cdev, &spi_driver_fops);
// 添加cdev到内核
ret = cdev_add(&mcp2515_cdev, dev_num, 1);
if (ret < 0)
{
printk(KERN_ERR "Failed to cdev_add\n");
}
// 创建设备节点
// 创建类
mcp2515_class = class_create(THIS_MODULE, "my-spi");
if (IS_ERR(mcp2515_class))
{
printk(KERN_ERR "Failed to create class\n");
return PTR_ERR(mcp2515_class);
}
// 创建设备
mcp2515_device = device_create(mcp2515_class, NULL, dev_num, NULL, "my-mcp2515");
if (IS_ERR(mcp2515_device))
{
printk(KERN_ERR "Failed to create device\n");
}
return 0;
}
4.编写驱动函数
配置工作模式:
在设备树配置,默认极性和相位都是0,高位先传输,cs是低电平选中:
/*节点中可以写入以下信息*/
spi-cpha; *表示cpha为1*
spi-cpol; *spi-cpol*
spi-lsb-first; *低位先传输*
spi-cs-high; *高电平表示选中*
常用的SPI收发接口:
函数原型:
static inline int spi_write(struct spi_device *spi, const void *buf, size_t len)
函数作用:
SPI 同步写函数
函数参数:
struct spi_device : spi 从设备
const void *buf: 要发送的数据
size_t len:发送数据的大小返回值: 成功返回 0,失败返回负数
函数原型:
static inline int spi_read(struct spi_device *spi, void *buf, size_t len)
函数作用:
SPI 同步读函数
函数参数: struct spi_device: spi 从设备
const void *buf: 读取到的数据缓冲区
size_t len: 读到的数据大小
返回值: 成功返回 0,失败返回负数
函数原型:
extern int spi_write_then_read(struct spi_device *spi,const void *txbuf, unsigned n_tx,void *rxbuf, unsigned n_x);
函数作用:
先写后读函数,同步,8bit
函数参数: struct spi_device: spi 从设备
constvoid *txbuf:发送数据缓冲区
unsigned n_tx: 发送的数据大小
void *rxbuf: 读取数据缓冲区
unsigned n_rx: 读到的数据大小
返回值: 成功返回 0,失败返回负数
编写驱动层SPI的收发:
char mcp2515_read_reg(char reg)
{
// 0x03是读取MCP2515寄存器的指令,reg是寄存器地址
char data[] = {0x03, reg};
char read_buf;
// 读取MCP2515寄存器,直接发送一个读取指令
int ret = spi_write_then_read(spi_dev, data, sizeof(data), &read_buf, sizeof(read_buf));
if (ret < 0)
{
printk(KERN_ERR "Failed to read MCP2515 register\n");
}
return read_buf;
}
void mcp2515_write_reg(char reg, char value)
{
// 写入MCP2515寄存器,先发送写入指令,再发送寄存器地址和数据
char data[] = {0x02, reg, value};
int ret = spi_write(spi_dev, data, sizeof(data));
if (ret < 0)
{
printk(KERN_ERR "Failed to mcp2515_write_reg MCP2515\n");
}
}
Driver的源程序:
#include <linux/init.h>
#include <linux/module.h>
#include <linux/spi/spi.h>
#include <linux/fs.h>
#include <linux/kdev_t.h>
#include <linux/cdev.h>
dev_t dev_num;
struct cdev mcp2515_cdev;
struct class *mcp2515_class;
struct device *mcp2515_device;
struct spi_device *spi_dev;
void mcp2515_reset(void)
{
char data[] = {0xc0};
// 查看mcp2515手册后知道的复位指令,不同的芯片/设备有着不同的指令功能,不是spi固定的发送步骤
// 复位MCP2515,直接发送一个复位指令
int ret = spi_write(spi_dev, data, sizeof(data));
if (ret < 0)
{
printk(KERN_ERR "Failed to reset MCP2515\n");
}
}
char mcp2515_read_reg(char reg)
{
// 0x03是读取MCP2515寄存器的指令,reg是寄存器地址
char data[] = {0x03, reg};
char read_buf;
// 读取MCP2515寄存器,直接发送一个读取指令
int ret = spi_write_then_read(spi_dev, data, sizeof(data), &read_buf, sizeof(read_buf));
if (ret < 0)
{
printk(KERN_ERR "Failed to read MCP2515 register\n");
}
return read_buf;
}
void mcp2515_write_reg(char reg, char value)
{
// 写入MCP2515寄存器,先发送写入指令,再发送寄存器地址和数据
char data[] = {0x02, reg, value};
int ret = spi_write(spi_dev, data, sizeof(data));
if (ret < 0)
{
printk(KERN_ERR "Failed to mcp2515_write_reg MCP2515\n");
}
}
ssize_t mcp2515_read(struct file *file, char __user *buf, size_t size, loff_t *offset)
{
return 0;
}
ssize_t mcp2515_write(struct file *file, const char __user *buf, size_t size, loff_t *offset)
{
return 0;
}
int mcp2515_open(struct inode *node, struct file *file)
{
return 0;
}
int mcp2515_release(struct inode *node, struct file *file)
{
return 0;
}
// 定义驱动的文件操作结构体
const struct file_operations spi_driver_fops = {
.owner = THIS_MODULE,
.open = mcp2515_open,
.read = mcp2515_read,
.write = mcp2515_write,
.release = mcp2515_release,
};
// 驱动的probe函数
static int spi_driver_probe(struct spi_device *spi)
{
int ret = 0;
printk("This is SPI driver probe\n");
spi_dev = spi;
// 添加一个字符设备
// 分配一个字符设备区域,dev_num 为设备号,cnt 为数量, name 为名字
ret = alloc_chrdev_region(&dev_num, 0, 1, "my-mcp2515");
if (ret < 0)
{
printk(KERN_ERR "Failed to alloc_chrdev_region\n");
return ret;
}
// 初始化cdev
cdev_init(&mcp2515_cdev, &spi_driver_fops);
// 添加cdev到内核
ret = cdev_add(&mcp2515_cdev, dev_num, 1);
if (ret < 0)
{
printk(KERN_ERR "Failed to cdev_add\n");
}
// 创建设备节点
// 创建类
mcp2515_class = class_create(THIS_MODULE, "my-spi");
if (IS_ERR(mcp2515_class))
{
printk(KERN_ERR "Failed to create class\n");
return PTR_ERR(mcp2515_class);
}
// 创建设备
mcp2515_device = device_create(mcp2515_class, NULL, dev_num, NULL, "my-mcp2515");
if (IS_ERR(mcp2515_device))
{
printk(KERN_ERR "Failed to create device\n");
}
return 0;
}
static int spi_driver_remove(struct spi_device *spi)
{
return 0;
}
// 设备树匹配表
static const struct of_device_id spi_driver_of_match_table[] = {
{.compatible = "my-mcp2515"},
{},
};
// 平台client id 匹配表
const struct spi_device_id spi_driver_id_table[] = {
{"spi_driver"},
{},
};
struct spi_driver spi_driver = {
.driver = {
.name = "spi_driver",
.owner = THIS_MODULE,
.of_match_table = spi_driver_of_match_table,
},
.probe = spi_driver_probe,
.remove = spi_driver_remove,
.id_table = spi_driver_id_table,
};
static int spi_driver_init(void)
{
int ret = 0;
ret = spi_register_driver(&spi_driver);
if (ret != 0)
{
printk(KERN_ERR "Failed to unregister spi driver\n");
}
return 0;
}
static void spi_driver_exit(void)
{
device_destroy(mcp2515_class, dev_num);
class_destroy(mcp2515_class);
cdev_del(&mcp2515_cdev);
unregister_chrdev_region(dev_num, 1);
spi_unregister_driver(&spi_driver);
}
module_init(spi_driver_init);
module_exit(spi_driver_exit);
MODULE_LICENSE("GPL");
四.使用应用层直接SPI通信:
使用应用层的SPI通信,会调用Linux内核中封装好的SPI接口函数,无需再向内核中添加spi_device
将通用的SPI编译进内核中,修改镜像文件,使其支持内核通用SPI驱动
Device Driver
[*]SPI support -->
<*>User mode SPI device driver support
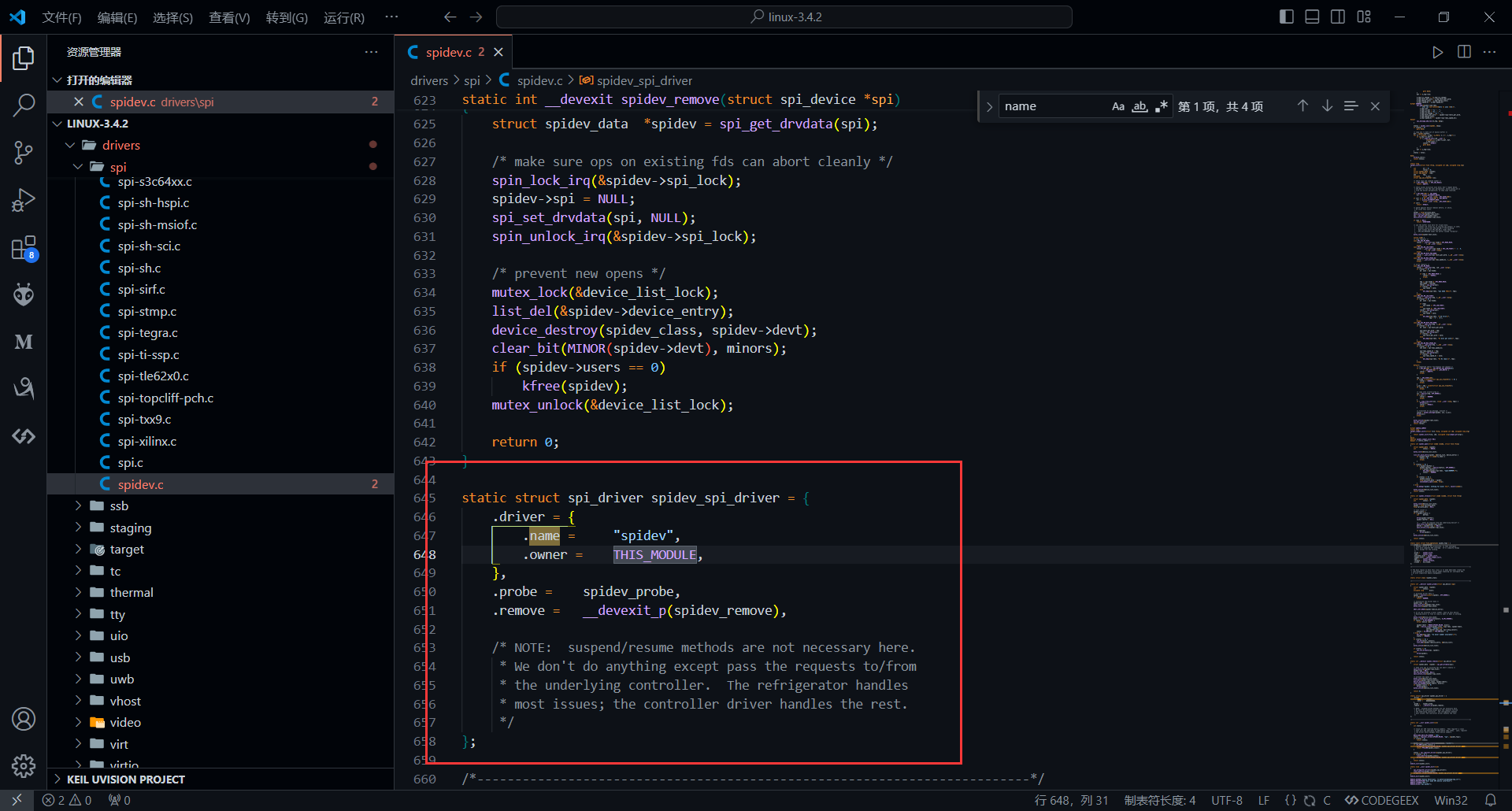
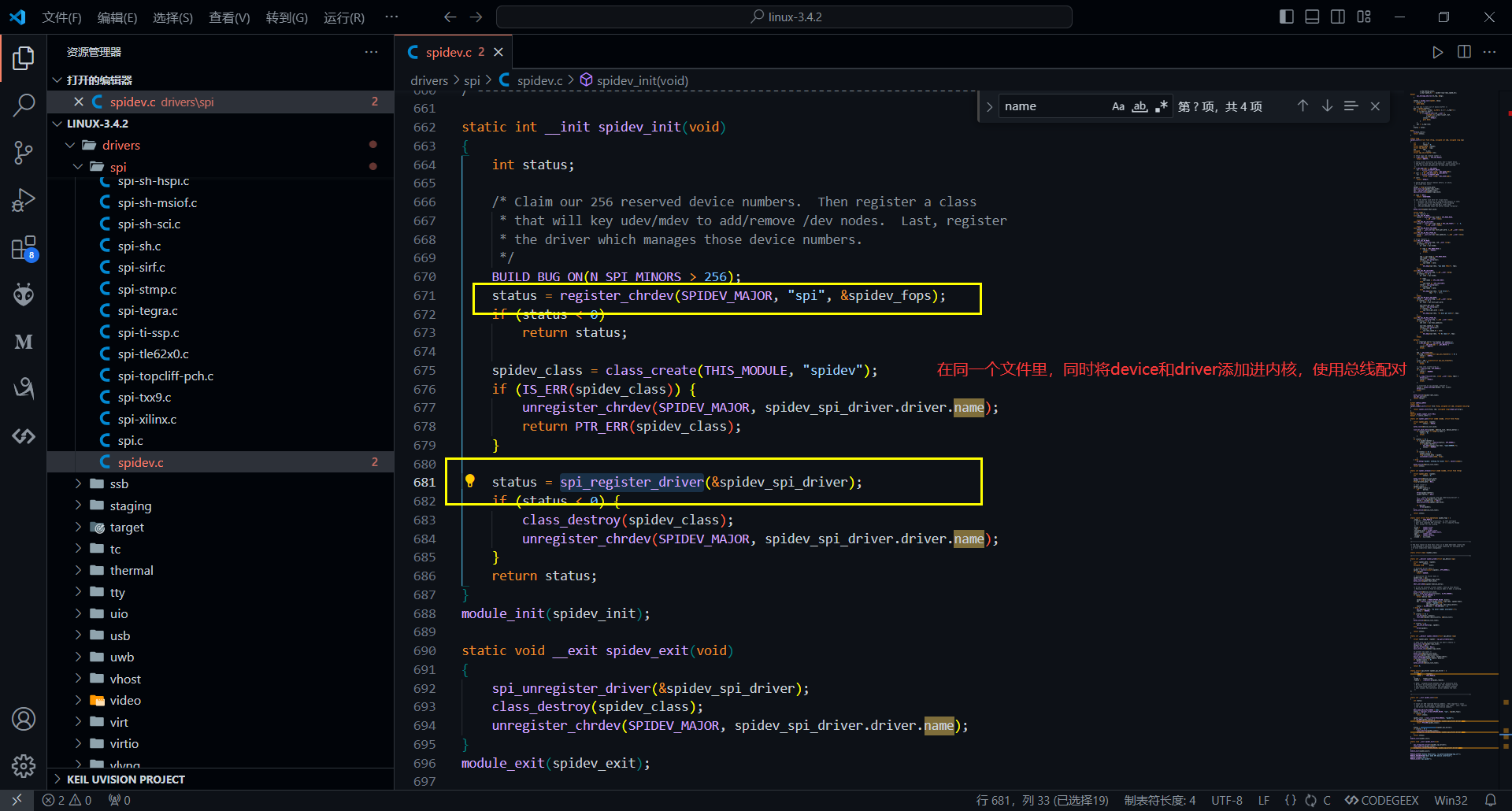
通用驱动的源码文件在 :driver/spi/spidev.c
spidev中将driver和device同时加进内核中,并创建了字符设备操作节点,以供应用层使用。
编写应用层的SPI通信操作:
#include <stdio.h>
#include <fcntl.h>
#include <linux/spi/spidev.h>
#include <sys/ioctl.h>
#include <sys/types.h>
#include <sys/stat.h>
#define RESET_CMD 0xc0
#define CANSTAT_REG 0x80
#define READ_CMD 0xcc
#define WRITE_CMD 0xc2
#define CANCTRL_REG 0x0f
#define CANSTAT_CTL 0x2b
int fd = 0;
int bits = 8; // 8bit
int speed = 1000000; // 1MHz
int mode = 0; // 0: mode0, 1: mode1
int spi_init(void)
{
int ret = 0;
fd = open("/dev/spidev0.0", O_RDWR);
if (fd < 0)
{
printf("Error opening spi device\n");
return -1;
}
/*
*spi mode 模式设置读写
*/
ret = ioctl(fd, SPI_IOC_WR_MODE, &mode);
if (ret < 0)
{
printf("Error setting spi mode\n");
return -1;
}
ret = ioctl(fd, SPI_IOC_RD_MODE, &mode);
if (ret < 0)
{
printf("Error setting spi mode\n");
return -1;
}
/*
*spi bits per word 发送和接收的bit数
*/
ret = ioctl(fd, SPI_IOC_WR_BITS_PER_WORD, &bits);
if (ret < 0)
{
printf("Error setting spi bits per word\n");
return -1;
}
ret = ioctl(fd, SPI_IOC_RD_BITS_PER_WORD, &bits);
if (ret < 0)
{
printf("Error setting spi bits per word\n");
return -1;
}
/*
*spi max speed hz 最大传输速度
*/
ret = ioctl(fd, SPI_IOC_WR_MAX_SPEED_HZ, &speed);
if (ret < 0)
{
printf("Error setting spi max speed hz\n");
return -1;
}
ret = ioctl(fd, SPI_IOC_RD_MAX_SPEED_HZ, &speed);
if (ret < 0)
{
printf("Error setting spi max speed hz\n");
return -1;
}
printf("spi init success\n");
printf("spi mode:%x\n", mode);
printf("spi bits per word:%d\n", bits);
printf("spi max speed hz:%d\n", speed);
return 0;
}
// 传输函数
//fd: spi设备文件描述符 tx: 发送数据 rx: 接收数据 len: 数据长度
int spi_transfer(int fd, char *tx, char *rx, int len)
{
int ret = 0;
struct spi_ioc_transfer tr = {
.tx_buf = (unsigned long)tx,
.rx_buf = (unsigned long)rx,
.len = len,
.delay_usecs = 0,
.speed_hz = speed,
.bits_per_word = bits,
};
// 标准的读()和写()操作显然只是半双工的,并且在这些操作之间去激活芯片选择。全双工接入,和无需芯片选择停用的复合操作,可使用SPI_IOC_ MESSAGE(N)请求。
ret = ioctl(fd, SPI_IOC_MESSAGE(1), &tr);
if (ret < 1)
{
printf("Error in spi transfer\n");
return -1;
}
return 0;
}
int main()
{
char reset_cmd[1] = {RESET_CMD};
char rd_canstat[2] = {READ_CMD, CANSTAT_REG};
char canstat[3] = {0};
spi_init();
//写操作则长度为reset_cmd,写命令数据的buff的长度
spi_transfer(fd, reset_cmd, NULL, sizeof(reset_cmd));
//读操作则长度为canstat,存储读取的数据的buff长度
spi_transfer(fd, rd_canstat, canstat, sizeof(canstat));
//存储读取的数据的buff中,会存有往设备中写入数据的值,第一个数据为READ_CMD,第二个数据为CANSTAT_REG,第三个是从机返回回来的值,所以要从第三个开始读取
printf("canstat: %x\n", canstat[2]);
char wr_canctrl[3] = {WRITE_CMD, CANSTAT_CTL, 0x00};
char canstat_new[4] = {0};
spi_transfer(fd, wr_canctrl, NULL, sizeof(wr_canctrl));
spi_transfer(fd, rd_canstat, canstat_new, sizeof(canstat_new));
//第一个数据为WRITE_CMD,第二个数据为CANSTAT_CTL,第二个数据为0x00,第四个是从机返回回来的值,所以要从第四个开始读取
printf("canstat_new: %x\n", canstat_new[3]);
return 0;
}
GPIO模拟SPI:
一般不需要用户手动编写SPI的模拟时序,大都直接使用Linux中提供的模拟通信:
使用时需要手动make menuconfig讲其添加进内核:
Device Driver
[*]SPI support
<*>GPIO-based bitbanging SPI Master
Linux下提供的模拟SPI源码目录:
kernel\drivers\spi\spi-gpio.c:
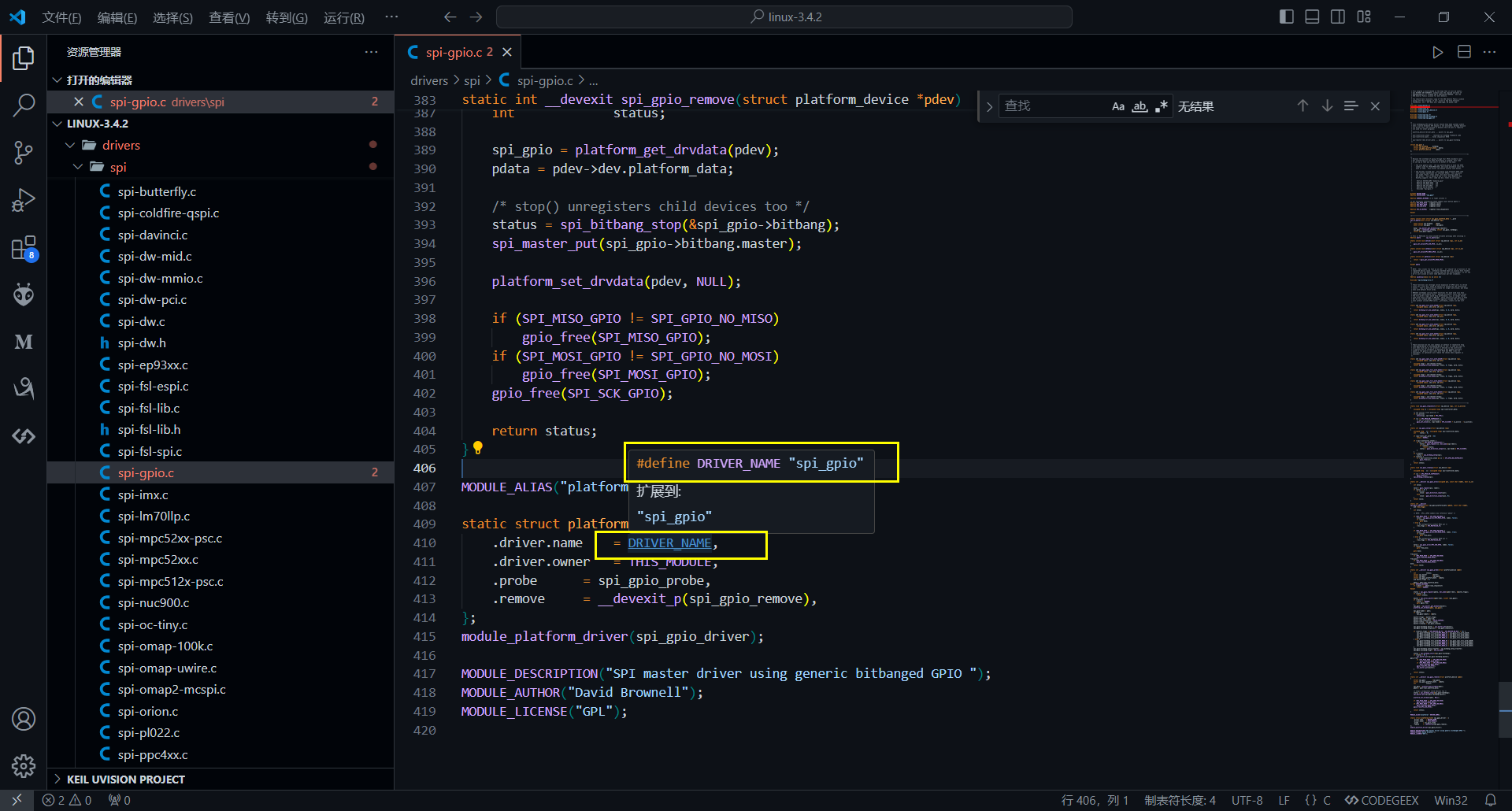
模拟的驱动匹配名为:#define DRIVER_NAME "spi_gpio"
所以在使用模拟SPI的通信时,需要添加平台device,属性名为spi-gpio,且需要有以下属性:
/*
* Because the overhead of going through four GPIO procedure calls
* per transferred bit can make performance a problem, this code
* is set up so that you can use it in either of two ways:
*
* - The slow generic way: set up platform_data to hold the GPIO
* numbers used for MISO/MOSI/SCK, and issue procedure calls for
* each of them. This driver can handle several such busses.
*
* - The quicker inlined way: only helps with platform GPIO code
* that inlines operations for constant GPIOs. This can give
* you tight (fast!) inner loops, but each such bus needs a
* new driver. You'll define a new C file, with Makefile and
* Kconfig support; the C code can be a total of six lines:
*
* #define DRIVER_NAME "myboard_spi2"
* #define SPI_MISO_GPIO 119
* #define SPI_MOSI_GPIO 120
* #define SPI_SCK_GPIO 121
* #define SPI_N_CHIPSEL 4
* #include "spi-gpio.c"
*/
#define DRIVER_NAME “myboard_spi2”
#define SPI_MISO_GPIO 119
#define SPI_MOSI_GPIO 120
#define SPI_SCK_GPIO 121
#define SPI_N_CHIPSEL 4
#include “spi-gpio.c”
所以需要在设备树中添加相关属性:
spi:spi@gpio{
compatible:"spi-gpio";
#address-cells = <1>;
gpio-sck = <&gpio0 RK_PB0 GPIO_ACTIVE_LOW>
gpio-miso= <&gpio1 RK_PB0 GPIO_ACTIVE_LOW>
gpio-mosi= <&gpio1 RK_PB1 GPIO_ACTIVE_LOW>
cs-gpios= <&gpio1 RK_PB2 GPIO_ACTIVE_LOW>
num-chipselects = <1>;
}
添加成功后会在dev下生成对应的SPI控制节点,使用方法和应用层直接SPI通信的操作一样
















 1030
1030

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











