







目录
1.1. 什么是XM3568-EP
XM3568-EP是集成了串口、CAN接口、开关量输入、开关量输出、AI电压采集等多种接口的边缘计算网关(以下简称:网关),也可额外扩展4G模块,SATA硬盘等插件;系统基于arm64架构;具备高可靠性的工业级处理核心;具备高处理能力的4核并发处理性能;运行Linux操作系统。
性能强悍
网关拥有4个1.5GHz主频的高性能核心,并内置linux 标准操作系统,不仅可以用于数据采集,也可当成常规服务器使用,根据用户自行需要,自由下载安装Mysql、Java、Chrome...等应用软件和编程语言SDK。
耐高低温和电磁兼容
网关通过GB/T2423、GB/T9254、GB/T17626等国家标准,满足各项高低温、电磁骚扰和磁场抗扰度试验等级,能够稳定运行在-20℃ ~ +70℃的环境温度和各种复杂的电磁环境下,可以适用于高速、户外园区、工业机房等各种复杂的应用场景。
接口丰富
网关集成了RS485、开关量接口、开关量输出等多个采集和控制接口,丰富的接口使得单个网关即可满足于各种工业设备的接入,无需外扩其他的采集模块。
4G通讯
网关内置4G通讯模块,默认使用DHCP功能,无需配置工具,网关上电后自动联网,方便快捷,上手快速,省去大量的人力成本。
视频输出
网关拥有HDMI高清多媒体接口,并提供多种常用视频分辨率,默认分辨率1920*1080P@60Hz,插入屏幕即可显示高清画面,并自动适配鼠标、键盘、触摸屏,使用户拥有与桌面PC相同的体验。

| 主板规格 | |
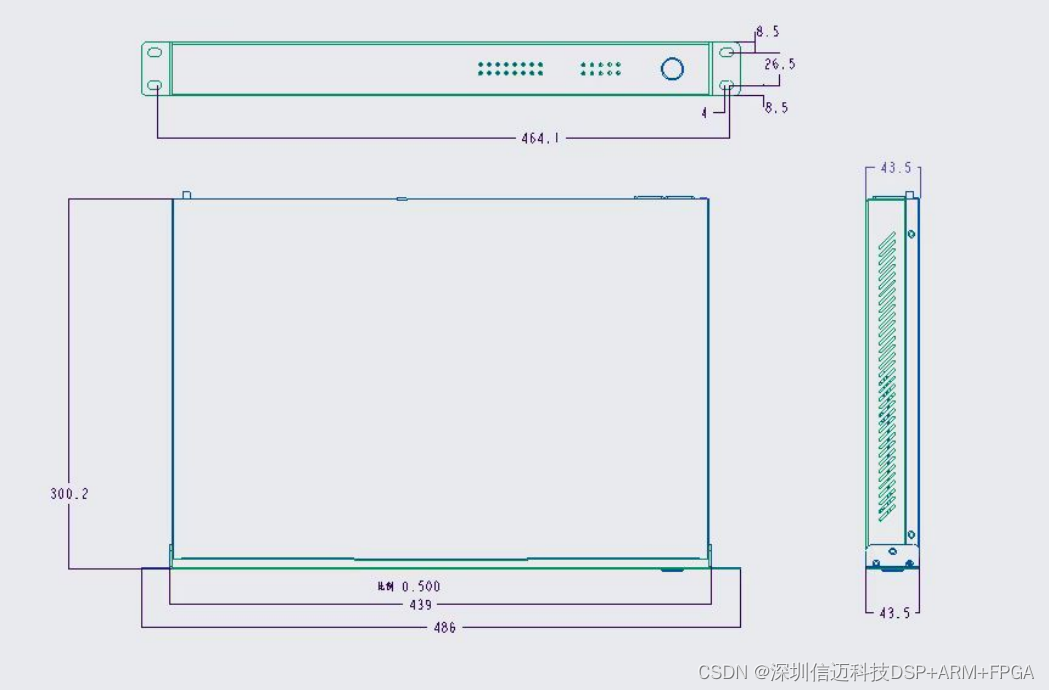
| 外观尺寸 | 439mm(L)X300.2mm(W)X43.5mm(H) |
| CPU | 四核64位1.5GHz Cortex™-A53处理器 |
| GPU | Mail G31 MP2 (OpenGL ES 3.2/2.0/1.0) |
| 内存 | 2GB (DDR3 / LPDDR4) |
| 板载存储 | 8GB EMMC |
| 以太网*2 | ETH1(10/100M)、ETH2(10/100/1000M自适应) |
| 电源 | 额定输入 AC100-240V,1.2A,50/60Hz DC120-340V,1.2A( L(+) N(-) ) |
| USB*2 | 支持2路USB2.0 |
| TYPE-C | DEBUG串口 |
| 视频输出 | HDMI2.0 (1920x1080p@60Hz/1280x720p@60Hz) |
| 实时时钟 | 1路RTC(断电下能长期记录实时时间) |
| MicroSD(TF) | 支持插入 <= 512GB 的MicroSD(TF)卡 |
| 采集接口规格(插线端子) | |
| CAN | 4路CAN(单路最高速率支持500k bps) |
| 串口 | 8路RS485 |
| 开关量输入 | 4路DI |
| 模拟量输入 | 4路AI (电压检测区间0.3 - 10V) |
| 开关量输出 | 4路DO(最高通过 AC 3A/250V,DC 3A/30V) |
| 12V直流电源输出 | 2路12V对外输出,单路最高500mA,6W |
| 选配扩展插件 | |
| 电源 | 标配1路电源模块,有2路电源版本选配 |
| 4G通讯 | 4G LTE Cat.1 无线通信模块(联网、短信、拨号) |
| SATA硬盘 | 支持512GB/1TB的2.5寸SATA硬盘 |
| 所有信号线均具有±15KV,10/700us波形浪涌6KV,8/20us波形浪涌2KV的ESD; 模块化板架构,可1U安装或配电箱安装; | |
| 网关稳定运行的环境温度应处于-20 ~ +70℃ | |
- 设备使用介绍
-
- 启动网关
- 网关默认已经烧录ubuntu18.04 LTS 操作系统
- 网关有HDMI高清多媒体接口,出厂根据客户定制需求已适配了1920x1080p@60Hz或者1280x720p@60Hz的分辨率,根据实际定制信息通过HDMI高清多媒体连接线将网关连接到显示器。
- USB可以接入触摸屏、USB鼠标或键盘,用于控制网关
- 网关有以太网口,可以插入网线进行远程控制
- 网关有TYPE-C数据接口,可以连接电脑端后通过串口工具进行远程控制,具体操作方式请查看DEBUG串口的使用方法一节
- 使用标配的AC-220V电源线接入网关即可开机
- 安装DEBUG串口驱动
- 使用TYPE-C转USB数据线,连接网关的TYPE-C数据接口到电脑端的USB数据接口
- 打开MobaXterm客户端,点击Session >> Seiral ,选择相应显示的串口,波特率设置为115200,选择OK保存
- 双击左边sessions会话栏对应session,打开会话窗口
| 名称 | 功能 |
| POWER | 电源指示灯 |
| 4G | 4G运行指示灯 |
| SYS | 系统运行指示灯 |
| COM | 串口数据指示灯(RX/蓝、TX/绿) |
| DI | 开关量输入触发指示灯 |
| DO | 开关量输出继电器闭合指示灯 |
发行版类型:Ubuntu 18.04 LTS
内核版本:Linux 4.9.170 arm64
gcc编译器:aarch64-linux-gnu-gcc 7.3.0
apt install -y vim
apt install -y sudo
apt install -y libgdiplus libc6-dev # GDI图形处理库
apt install -y unzip
# 安装桌面环境和浏览器
apt install -y chromium-browser #297MB
apt install -y xserver-xorg #40.6MB
apt install -y xinit #58.4KB
apt install -y xterm #2188KB
apt install -y matchbox-window-manager #584KB
# 安装中文环境
apt install -y xfonts-intl-chinese
apt install -y ttf-wqy-zenhei #文泉驿-正黑
apt install -y xfonts-wqy #文泉驿-点阵宋体*
- pip数据源
pip install pyserial
pip install pymysql
pip install pexpect
pip install sanic
| 账号 | 密码 | 权限等级 |
| root | 123456 | 超级管理员 |
| system | system | 备用账号 |
| 以太网 | 默认IP | 说明 |
| eth0 | DHCP | 4G通讯模块(需选配) |
| eth1 | 192.168.1.177 | ETH百兆以太网 |
| eth2 | 192.168.2.177 | ETH千兆以太网 |
目前常见的 Linux 发行版使用的网络管理服务有数种,网关默认使用最为常规的systemd-networkd.service网络管理服务,配置文件的目录及文本内容如下所示。
vi /etc/systemd/network/eth1.network
### 以下是文本内容
[Match]
Name=eth1
[Network]
Address=192.168.1.177/24
DNS=114.114.114.114
[Gateway]
Gateway=192.168.1.1
Destination=192.168.1.0/24
### 文本内容结束
vi /etc/systemd/network/eth2.network
### 以下是文本内容
[Match]
Name=eth2
[Network]
Address=192.168.2.177/24
DNS=114.114.114.114
[Gateway]
Gateway=192.168.2.1
Destination=192.168.2.0/24
### 文本内容结束
当配置好对应需要的IP之后,在文本内使用:wq保存退出文件,之后只需重启网关或者使用systemctl restart systemd-networkd命令重启网络管理服务,设置IP即可生效。配置文件更多配置参数可参考http://www.jinbuguo.com/systemd/systemd.network.html#
网关目前支持1920x1080p@60Hz或者1280x720p@60Hz的分辨率,通过修改配置文件/boot/uEnv.txt来调整分辨率。
vi /boot/uEnv.txt
### 以下是文本内容
screen0_output_mode=10
dev0_output_mode=10
fb0_width=1920
fb0_height=1080
### 文本内容结束,修改分辨率按照文本内容复制粘贴替换
### 修改分辨率为1280*720@60Hz
screen0_output_mode=5
dev0_output_mode=5
fb0_width=1280
fb0_height=720
### 修改分辨率为1920*1080@60Hz
screen0_output_mode=10
dev0_output_mode=10
fb0_width=1920
fb0_height=1080
### 修改分辨率为800*1280@60Hz
screen0_output_mode=69
dev0_output_mode=69
fb0_width=800
fb0_height=1280
备注:若需要将800*1280@60Hz分辨率横屏显示,需要将/etc/X11/ 目录下的xorg.conf.bak 和xorg.conf.d/40-libinput.conf.bak重命名为xorg.conf和xorg.conf.d/40-libinput.conf。
网关默认使用/opt/scripts/boot/view.sh来配置开机显示程序画面,如需修改默认开机显示程序及端口,可自行修改该文件。
vi /opt/scripts/boot/view.sh
### 以下是文本内容
#! /bin/bash
export DISPLAY=:0
nohup xinit matchbox-window-manager > /dev/null 2>&1 &
# 演示版web 应用, 占用了80端口, 可自行注释或删除行
nohup python /opt/scripts/boot/web.py > /dev/null 2>&1 &
# 打开chromium浏览器,访问网址
nohup chromium-browser --no-sandbox --kiosk --app="http://127.0.0.1:80" > /dev/null 2>&1 &
sleep 5s
# xset 需要等桌面服务启动后才能设置
# xset s 10 600
# 10秒后进入屏保
xset s off # 关闭屏保
# xset dpms 0 0 0 # 设置电源管理 standby, suspend, off
xset -dpms # 关闭电源管理 +dpms 开启电源管理
### 文本内容结束
配置文件调用chromium 浏览器打开http://127.0.0.1:80网址,显示页面如下:
网关共有4个DI接口,对应rootfs空间下的设备节点/dev/di,并且仅支持只读模式。简单测试指令可以使用cat 指令直接读取/dev/di 设备节点。
cat /dev/di
### 以下是返回文本
0x0ff1
### 以下是解析说明
# 0x0ff1 即换算成2个字节,即16位bit 0000 ffff ffff 0001
# 高12位bit保留
# 以此解析(高位在前),此时bit0置0,网关面板应是DI1与地短接
以下为代码调用,仅以C语言作为示例
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
void main(void){
int fd = 0;
unsigned char hex_buf[2] = {0, 0};
fd = open("/dev/di", O_RDONLY);
if (fd < 0)
{
printf("error\n");
return;
}
// 对于DI,最多读取2个字节,高位在前
read(fd, hex_buf, 2);
printf("0x%02X%02X\r\n", hex_buf[0], hex_buf[1]);
}
网关共有4个DO接口,对应rootfs空间下的设备节点/dev/do设备节点,支持读写模式。简单测试指令可以使用echo 及cat 指令直接读写设备节点
echo 0x01 > /dev/do
### 以下是解析说明
# 1 继电器闭合 0 继电器断开
# 0x01 = 0000 0001
# 继电器DO1 闭合 其余继电器断开
以下为代码调用,仅以C语言作为示例
#include <stdio.h>
#include <stdlib.h>
#include <fcntl.h>
#include <unistd.h>
#include <string.h>
void main(void){
int fd = 0;
unsigned char hex_buf[1] = {0};
fd = open("/dev/do", O_RDWR);
if (fd < 0)
{
printf("error /dev/do\n");
return;
}
// 对于DO,最多读写1个字节,高位在前
read(fd, hex_buf, 1);
printf("0x%02X\r\n", hex_buf[0]);
hex_buf[0] = 1;
write(fd, hex_buf, 1);
}
网关共有8路RS485串口。8路串口最高可支持115200波特率。
网关面板与设备节点对应关系
| 面板标识 | 设备节点 |
| A1B1 | /dev/com1 |
| A2B2 | /dev/com2 |
| A3B3 | /dev/com3 |
| A4B4 | /dev/com4 |
| A5B5 | /dev/com5 |
| A6B6 | /dev/com6 |
| A7B7 | /dev/com7 |
| A8B8 | /dev/com8 |
网关共有4个AI接口,对应rootfs空间下的设备节点/dev/adc设备节点,支持串口读写模式。
(波特率: 9600 数据位: 8 校验位: None 停止位: 1)
串口每隔约300毫秒接收一段AI接口电压数据,字节内容及数据解析如下:
01 03 00 00 00 00 12 cf 00 00 0d 0a
// 串口每隔300毫秒接收12个字节数据
// 以 0x01 0x03开头,以0x0d 0x0a (\r\n)结尾
// 常规编程语言可以使用readline()等函数按行接收数据,以保证数据不粘包
// 电压数据单位mV
// 中间8个字节从左到右每2个字节代表1个AI接口电压值
如以上接收内容转化为实际电压值
AI1: 0x0000
AI2: 0x0000
AI3: 0x12cf = 4815 mV
AI4: 0x0000
网关共有4路CAN接口,CAN接口支持5k、10k、20k、25k、40k、50k、80k、100k、125k、200k、250k、400k、500k等波特率,支持远程帧和扩展帧,暂不支持过滤器。
#include <stdio.h>
#include <string.h>
#include <unistd.h>
#include <net/if.h>
#include <sys/ioctl.h>
#include <sys/socket.h>
#include <linux/can.h>
#include <linux/can/raw.h>
#include <stdint.h>
uint8_t BBC(uint8_t *data, uint16_t len)
{
uint8_t value = 0;
uint16_t i;
for (i = 0; i < len; i++)
{
value ^= data[i];
}
return value;
}
int main(void)
{
__u8 buf[8] = {0x31, 0x32, 0x33, 0x34, 0x35, 0x36, 0x37, 0x38};
int sock_fd, i, j;
unsigned long nbytes, len;
struct sockaddr_can addr;
struct ifreq ifr;
struct can_frame frame;
/*建立套接字,设置为原始套接字,原始CAN协议 */
sock_fd = socket(PF_CAN, SOCK_RAW, CAN_RAW);
/*以下是对CAN接口进行初始化,如设置CAN接口名,即当我们用ifconfig命令时显示的名字 */
strcpy((char *)(ifr.ifr_name), "can1");
ioctl(sock_fd, SIOCGIFINDEX, &ifr);
printf("can0 can_ifindex = %x\n", ifr.ifr_ifindex);
addr.can_family = AF_CAN;
addr.can_ifindex = ifr.ifr_ifindex;
/*将刚生成的套接字与CAN套接字地址进行绑定*/
bind(sock_fd, (struct sockaddr*)&addr, sizeof(addr));
/*设置CAN帧的ID号,可区分为标准帧和扩展帧的ID号*/
frame.can_id = 0x1122;
// strcpy((char *)frame.data,"1234567");
// frame.can_dlc = strlen(frame.data);
memcpy(frame.data, buf, 8);
frame.can_dlc = 8;
printf("Send a CAN frame from interface %s\n", ifr.ifr_name);
/*开始发送数据*/
nbytes = sendto(sock_fd, &frame, sizeof(struct can_frame), 0, (struct sockaddr*)&addr, sizeof(addr));
printf("nbytes %ld!\n", nbytes);
i = 0;
while (i < 10)
{
nbytes = read(sock_fd, &frame, sizeof(struct can_frame));
printf("nbytes %ld!\n", nbytes);
if (nbytes < 0)
{
printf("can raw socket read");
close(sock_fd);
return 1;
}
else
{
/*将接收到的CAN数据打印出来,其中ID为标识符,DLC为CAN的字节数,DATA为1帧报文的字节数*/
printf("CAN frame:\n ID = %x\n DLC = %x\n DATA = %s\n",frame.can_id,frame.can_dlc,frame.data);
for(j=0; j<frame.can_dlc; j++)
printf("%02x ", frame.data[j]);
printf("\n");
}
i++;
}
close(sock_fd);
return 0;
}
使用cat 指令读取设备唯一标识
cat /proc/cpuinfo |grep "Serial"|awk {'print $3'}
扩展TF卡和SATA硬盘操作方式一致,故以TF卡为例。设备TF卡扩展插槽支持安装TF(MicroSD)卡增加扩展存储,理论扩展存储无上限,实测过安装容量512G的TF卡可以稳定运行(SATA硬盘容量实测支持1TB)。
扩展SATA硬盘读写速率如下:
### 测试SATA硬盘读写速率(1Gb)
### 1. 测试目录所在磁盘的写入速度
time dd if=/dev/zero bs=1024 count=1000000 of=./1Gb.file
1024000000 bytes (1.0 GB, 977 MiB) copied, 30.2637 s, 33.8 MB/s
### 2. 测试目录所在磁盘的读出速度
time dd if=./1Gb.file bs=1024 of=/dev/null
1024000000 bytes (1.0 GB, 977 MiB) copied, 32.7612 s, 31.3 MB/s
- 安装时切勿带电工作。
- 请勿使用有机溶剂或腐蚀性液体清洗网关。
- 交流电源输入AC100~240V 或直流电源输入DC120-340V,建议使用安规认证的电源线。
- 请遵循所有标注在网关及网关相关说明上的警示和指引信息。
- 请保持网关干燥,如果不慎被任何液体泼溅或浸润,请立刻断电并充分晾干。
- 使用中注意网关的通风散热,避免温度过高造成元器件损坏。
- 请勿在多尘、脏乱的环境中使用或存放网关。
- 请勿粗暴对待网关,跌落、敲打或剧烈晃动都可能损坏线路及元器件。
- 请勿自行修理、拆卸本公司产品,如网关出现故障请及时联系本公司进行维修,擅自修改或使用未经授权的配件可能损坏网关,由此造成的损坏将不予以保修。
















 4378
4378











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









