








目录
数据融合一词出现于20世纪70年代初期,最早在美国研究机构进行声纳信号理解系统研究中首次提出,接着在军事领域的C3I(Command,Control,Communication)系统中重点应用,并在之后的几次局部战争中取得了较好的应用成效,引起世界各国的广泛关注。随着各国在军事方面相继展开数据融合的研究,并于20世纪80年代后期逐渐形成一个单独研究领域,随后在其他多个领域取得了广泛应用,成为了一门多学科领域交叉的综合理论与方法。
对于数据融合的定义国内外众多学者给出了不同的解释,Mangolini[1]最早在其博士论文中给出的定义为:数据融合是整合不同来源的数据的方法与手段,用以提高信息的质量。
1 多源遥感数据融合
随着对地观测技术的迅速发展,遥感成像手段日趋多样化。在相同场景中,多源遥感图像所捕捉的地物对象虽然保持一致,但其在反映目标特性方面却展现出各自的独特性,所提供的信息既互补又协同。借助多源遥感数据融合技术,即通过对同一观测区域不同遥感影像数据源进行特征提取、分类、再叠加,能够生成更高质量和分辨率的遥感图像或数据,有效弥补单一传感器的性能局限,显著提升地物识别的精度,从而更好地满足研究需求[2]。
高光谱、激光雷达、红外等多源遥感图像融合能够综合利用不同传感器获取的图像信息,实现更精准、更全面的遥感对地观测,已成为遥感领域的研究热点[3]。
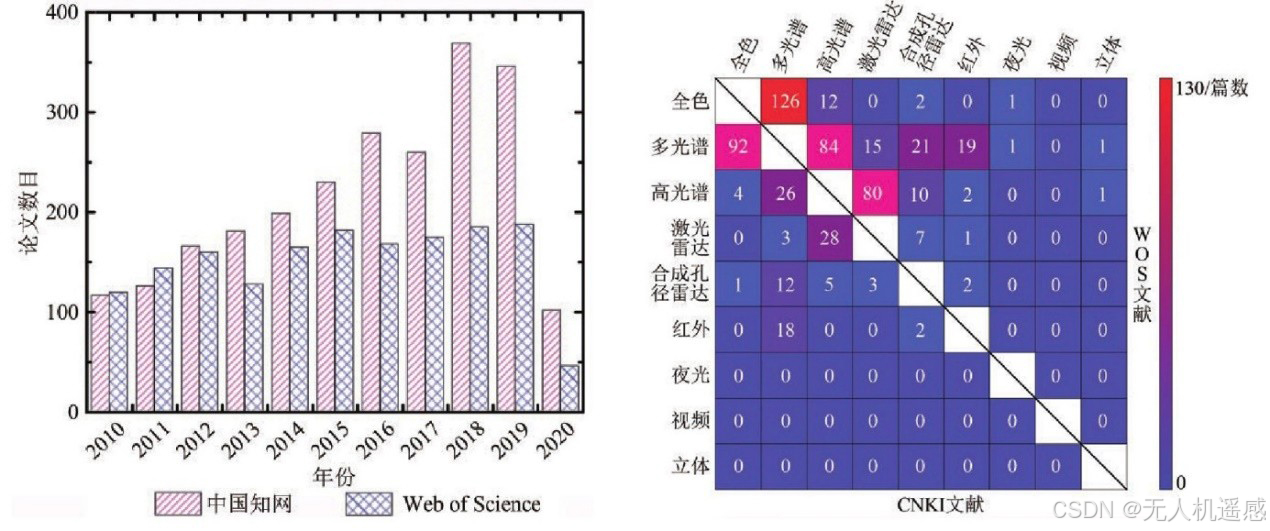
图 1 近10年多源遥感数据融合相关文献数量统计图(来自WOS和CNKI检索数据)
X20P-LIR一体式多源遥感系统是一款集激光雷达、热红外及高光谱成像为一体的多功能无人机遥感设备,能够同步获取激光雷达、红外及高光谱图像数据。主要功能包括:基于光场成像技术的高光谱成像(光谱范围350~1000 nm)、5 MP高清全色相机、测距达450 m(@80%Ref)的固态激光雷达、大面阵高精度热红外成像;主机内置控制系统、高精度惯导及固态存储,整机重量轻、操作简单,适合M300/M350 RTK无人机搭载使用。

图2 X20P-LIR搭载于M350 RTK无人机进行数据采集作业
2 高光谱遥感图像
高光谱成像技术通过地物反射的电磁波获取丰富的高分辨率光谱信息,凭借其卓越的图谱合一的光谱指纹识别能力和近似连续的光谱信息探测性能,能够有效对不同材质地物进行划分,在获取地物光谱信息和精细识别等方面具有无可替代的显著优势。
在ENVI中打开高光谱影像,依次进行真彩色RGB(R:红波段、G:绿波段、B:蓝波段)、标准假彩色CIR(R:近红外波段、G:红波段、B:绿波段)显示,并基于近红外波段和红波段计算NDVI,得到的高光谱影像RGB、CIR、NDVI图分别如下所示:

图 3 某遥感试验站X20P-LIR高光谱影像RGB图

图 4 某遥感试验站X20P-LIR高光谱影像CIR图
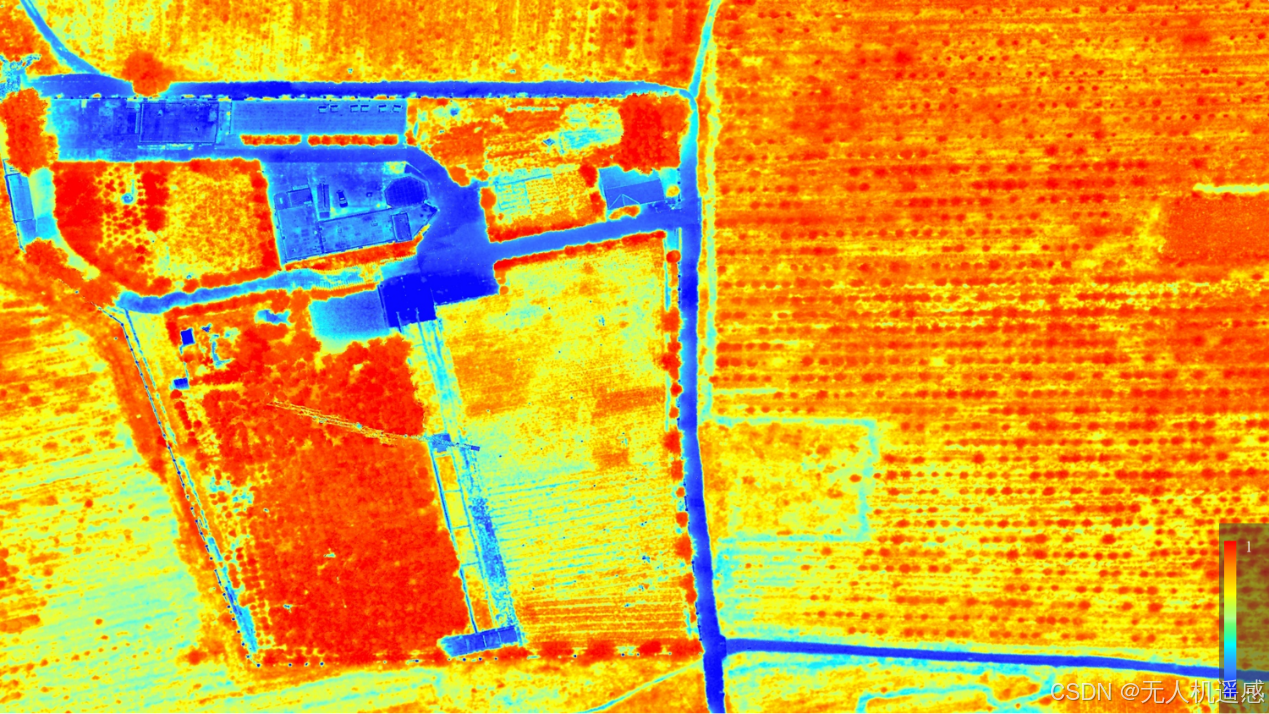
图 5 某遥感试验站X20P-LIR高光谱影像NDVI图
3 热红外图像
任何物体,只要温度高于绝对零度,就会不停地向周围空间发出热辐射。人眼感知不了热辐射,不能形成图像,但是热红外传感器可以收集、记录地物的热辐射,获得的热红外成像数据可用于识别地物和反演地表参数(如温度、湿度和热惯量等),在民用和军用领域有广泛的用途。

图 6 某遥感试验站X20P-LIR热红外图
4 LiDAR点云
激光雷达LiDAR(Light Detection And Ranging)凭借穿透性高、灵活性好和测量精度高等特点在全天候获取观测目标三维信息方面具有显著优势。
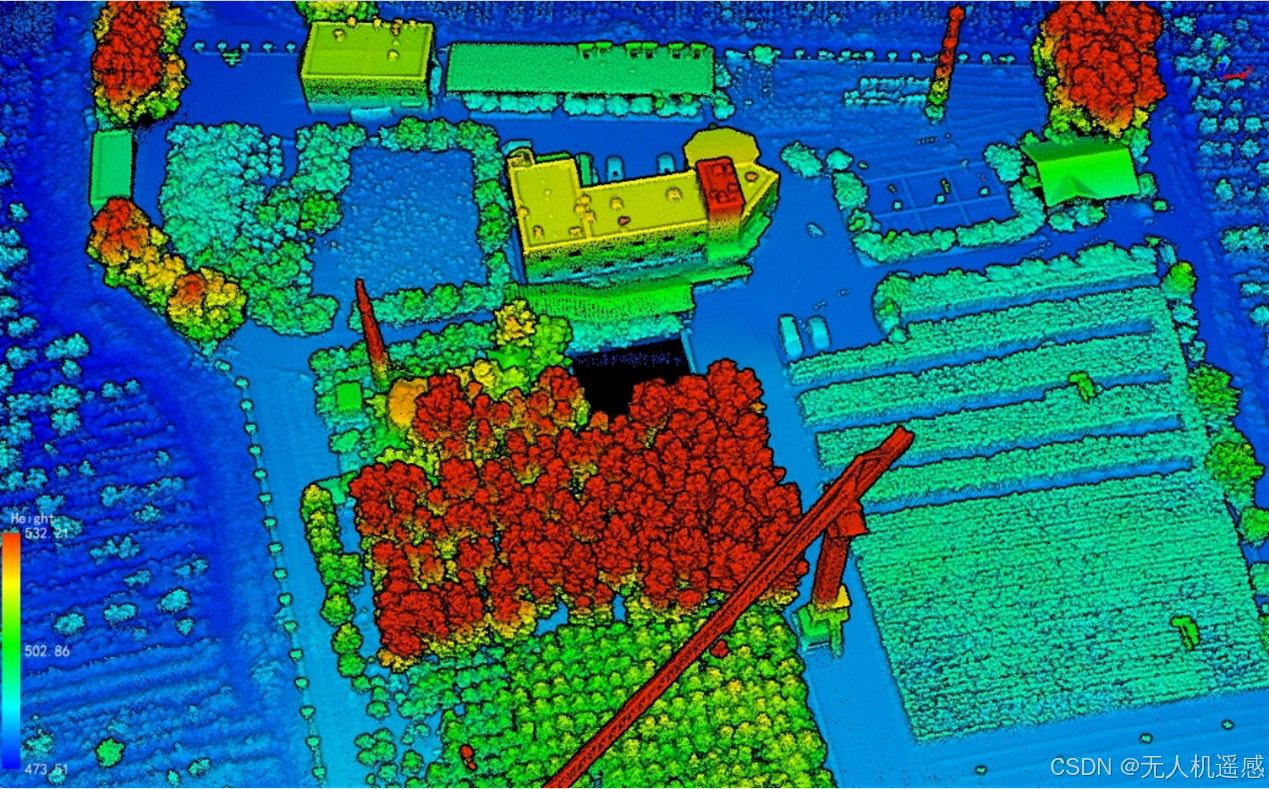
图 7 某遥感试验站X20P-LIR LiDAR点云图
5 数据融合层次
自Mangolini提出数据融合概念和层次以来,后续学者依据融合发生的阶段和信息抽象程度,将多源遥感数据融合划分为3个层次:像素级融合、特征级融合和决策级融合。
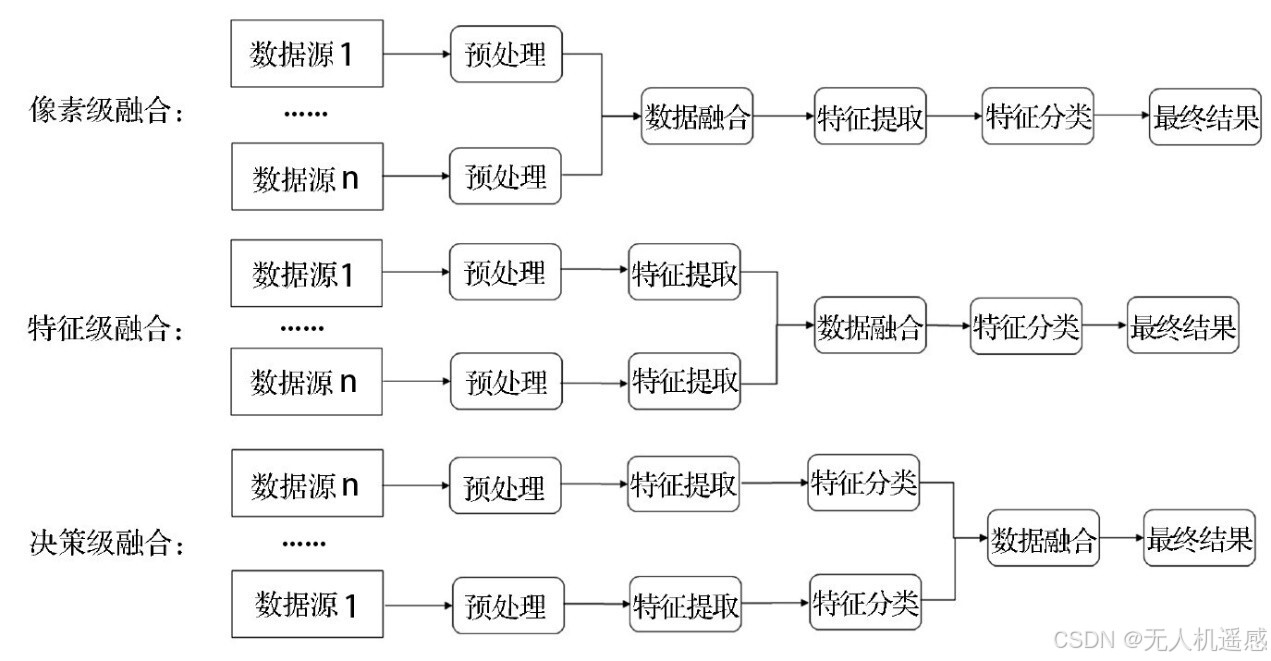
图 8 数据融合的3个层次
(1)像素级融合
像素级融合是在原始数据层面进行的融合,即对图像的每个像素点进行一一匹配,然后在像素层次对融合图像的信息进行综合处理。
(2)特征级融合
特征级融合从原始影像中提取特征信息(如边缘、形状、轮廓、纹理、光谱等),然后对其特定特征进行综合分析和处理,生成包含特征信息的融合图像。
(3)决策级融合
决策级融合是在每个数据源经过初步分类后,对来自几个单独的数据源信息进行融合,其结果为指挥和控制决策提供依据。
6 不同数据融合层次比较
数据级融合、特征级融合和决策级融合的优缺点和主要理论支撑如下表所示。
表 1 不同层次的数据融合方式及其优缺点
| 融合层次 | 优点 | 缺点 | 主要理论支撑 |
| 数据级融合 | 原始信息丰富,精度最高 | 数据量巨大,实时性和抗干扰能力差 | HIS变换、PCA变换、小波变换及加权平均等 |
| 特征级融合 | 抗干扰能力强,易实现实时处理,具有较高精度 | 融合前需要先对特征进行相关处理 | 聚类分析法、贝叶斯估计法、加权平均法、D-S证据推理法及神经网络法等 |
| 决策级融合 | 通信量小,容错能力较强 | 对信息可信度要求高 | 贝叶斯估计法、专家系统、神经网络法、模糊集理论及可靠性理论等 |
7 数据融合方法及分类
不同层次数据融合方法各异。像素级融合方法有亮度色度饱和度变换、小波变换、Brovey变换,特征级融合方法包括主成分分析、稀疏表示、神经网络模型、卷积神经网络模型,决策级融合方法有Bayesian推理、Dempster-Shafer理论、模糊集合、专家系统、马尔可夫随机场。
表 2 3种融合层次常用方法
| 融合层次 | 方法 | 特点 |
| 像素级融合 | 亮度色度饱和度变换 (IHS)(光学) | 能够平滑地融合色彩和空间特征,融合后光谱色彩失真严重。 |
| 小波变换(WT)(光学) | 有效提高空间分辨率,最大程度地保留光谱特性,具有更好的信噪比和改善感。 | |
| Brovey变换(BT)(光学) | 锐化图像的同时能够保持原光谱图像的信息内容,突出地物光谱特征,存在一定的光谱扭曲。 | |
| 特征级融合 | 主成分分析(PCA) | 基于PCA的方法在保持图像清晰度方面有优势,融合后的图像也相对清晰。由于维数的诅咒,PCA作为一种简单的无监督的特征外显法,被认为是最有效的方法。 |
| 稀疏表示(SR) | 能够有效表示图像本质特征和图像之间的相关性,但计算复杂性较高。 | |
| 神经网络模型(ANN) | 与传统的聚类方法相比,人工神经网络是一种更强大的、自适应的模式识别方法,可以通过学习实现信息召回,抵抗硬件或数据故障。 | |
| 卷积神经网络模型(CNN) | CNN通过使用局部连接来提取高层次的空间特征,获取更复杂的结构信息,带来更大的鲁棒性和更高的效率,CNN的权重共享策略极大地减少了可训练的参数,可以用较少的训练样本进行良好的训练。 | |
| 决策级融合 | Bayesian推理(DST) | 贝叶斯框架可以在证据充足的情况下完成一个假设为真概率的确定,能够将主观概率用于假设的先验概率,以及用于给定假设的证据概率。贝叶斯证据推理也存在过度依赖先验假设和条件概率,计算成本高等缺陷。 |
| Dempster-Shafer理论 | 贝叶斯方法的延伸,能够解除对信息先验的限制,计算复杂性高。 | |
| 模糊集合、专家系统、马尔可夫随机场 | 根据需要的不同,通过定义、推理、判断等方法实现数据分类。 |
每种方法都有各自的优势和局限性,为了得到更好的融合效果,可用将多种方法相结合的混合型融合方法。通常混合型融合方法效果优于单一融合方法。
引用文献
-
Mangolini, M., Apport de la fusion d'images satellitaires multicapteurs au niveau pixel en télédétection et photo-interprétation. 1994, Université de Nice Sophia-Antipolis.
-
王书伟, et al., 激光雷达与高光谱成像技术数据融合研究进展. 遥感技术与应用, 2024. 39(01): p. 11-23.
-
李树涛, 李聪妤, and 康旭东, 多源遥感图像融合发展现状与未来展望. 遥感学报, 2021. 25(01): p. 148-166.

















 3308
3308

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









