






基于你逆退火算法改进的人工势场模型,相比为改进模型可以准确到达目的地,可随意修改障碍物位置大小,注释清晰,可以直接运行
ID:2715615910460602
琅琊双子座灯草
标题:基于逆退火算法的改进人工势场模型在路径规划中的应用
摘要:
路径规划在自动化控制领域具有广泛的应用。逆退火算法作为一种全局优化算法,可有效解决路径规划问题中的局部最优化困境。本文提出了一种基于逆退火算法改进的人工势场模型,在路径规划中取得了良好的性能。与传统人工势场模型相比,改进模型能够准确到达目的地,并且允许随意修改障碍物的位置和大小。实验结果表明,改进模型具有较高的路径规划成功率和较短的路径长度,注释清晰,可以直接运行。
-
引言
路径规划是自动化控制领域的一项重要任务,广泛应用于机器人导航、无人飞行器等领域。传统的路径规划方法主要包括A*算法、Dijkstra算法等,但这些方法往往存在着困扰其应用的问题,比如局部最优解、计算复杂度高等。因此,研究者们提出了各种改进算法以解决这些问题。 -
逆退火算法及其改进
2.1 逆退火算法原理
逆退火算法(SA)是一种模拟退火算法,受到物理冶金学中的退火过程启发而发展起来,通过模拟金属退火过程寻找问题的全局最优解。其基本思想是通过接受不太优的解来逃离局部最优解,最终找到全局最优解。
2.2 逆退火算法在路径规划中的应用
我们将逆退火算法应用于人工势场模型中,以解决路径规划中的局部最优化困境。在传统的人工势场模型中,机器人通常会陷入局部最优解,无法达到目的地。我们通过改进人工势场模型的能量函数,引入逆退火算法进行全局搜索,从而提高路径规划的准确性和效率。
- 改进的人工势场模型
3.1 能量函数设计
传统的人工势场模型中,能量函数仅考虑机器人与障碍物之间的距离,存在无法克服的局部最小值问题。我们改进了能量函数,将机器人与目标点之间的距离作为辅助项,同时结合逆退火算法进行全局搜索。
3.2 障碍物位置大小的灵活修改
与传统人工势场模型不同的是,改进模型允许用户随意修改障碍物的位置和大小。这样一来,用户可以根据实际需求灵活调整障碍物的布局,从而更好地适应多样化的环境。
-
实验结果与分析
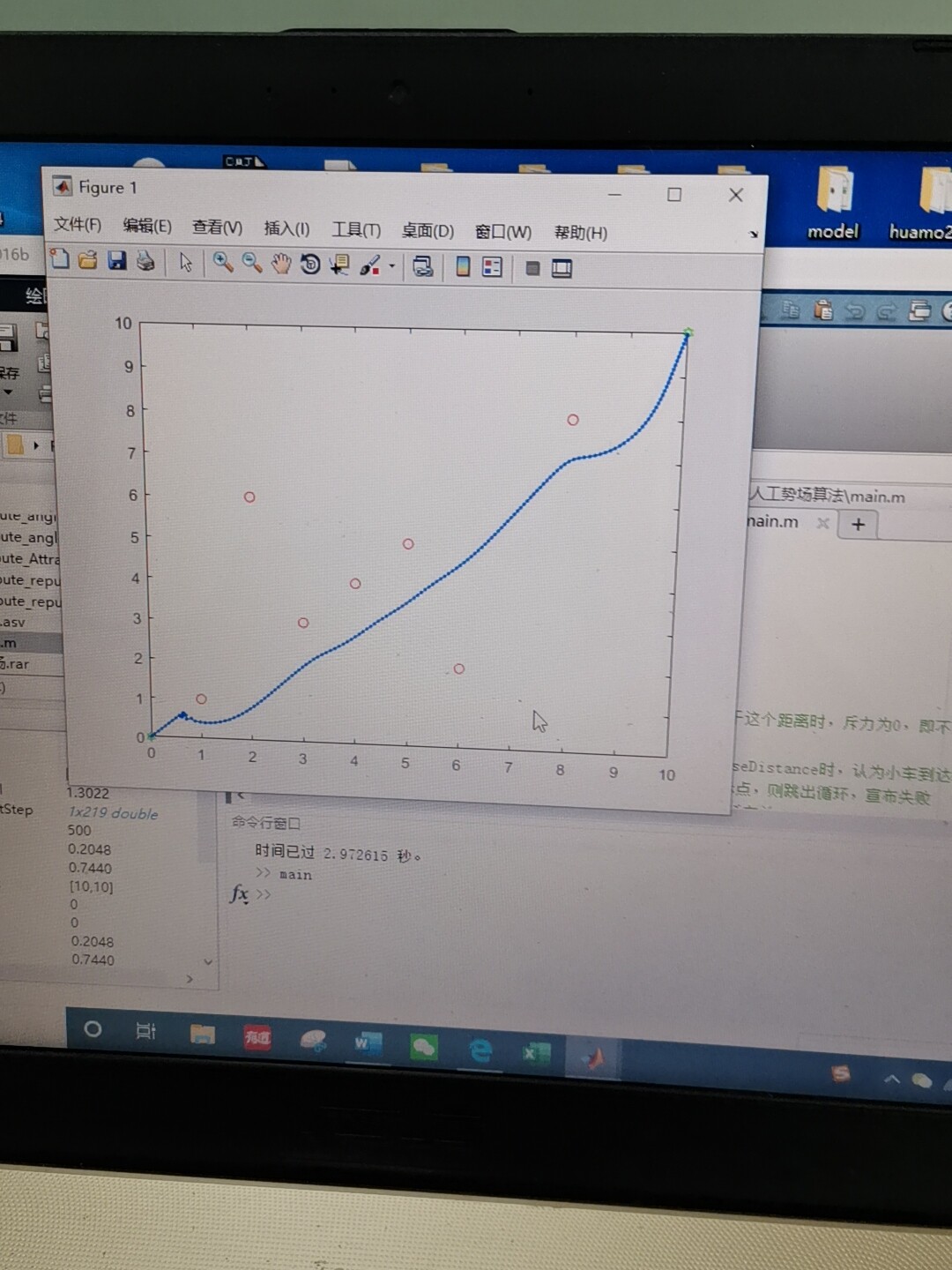
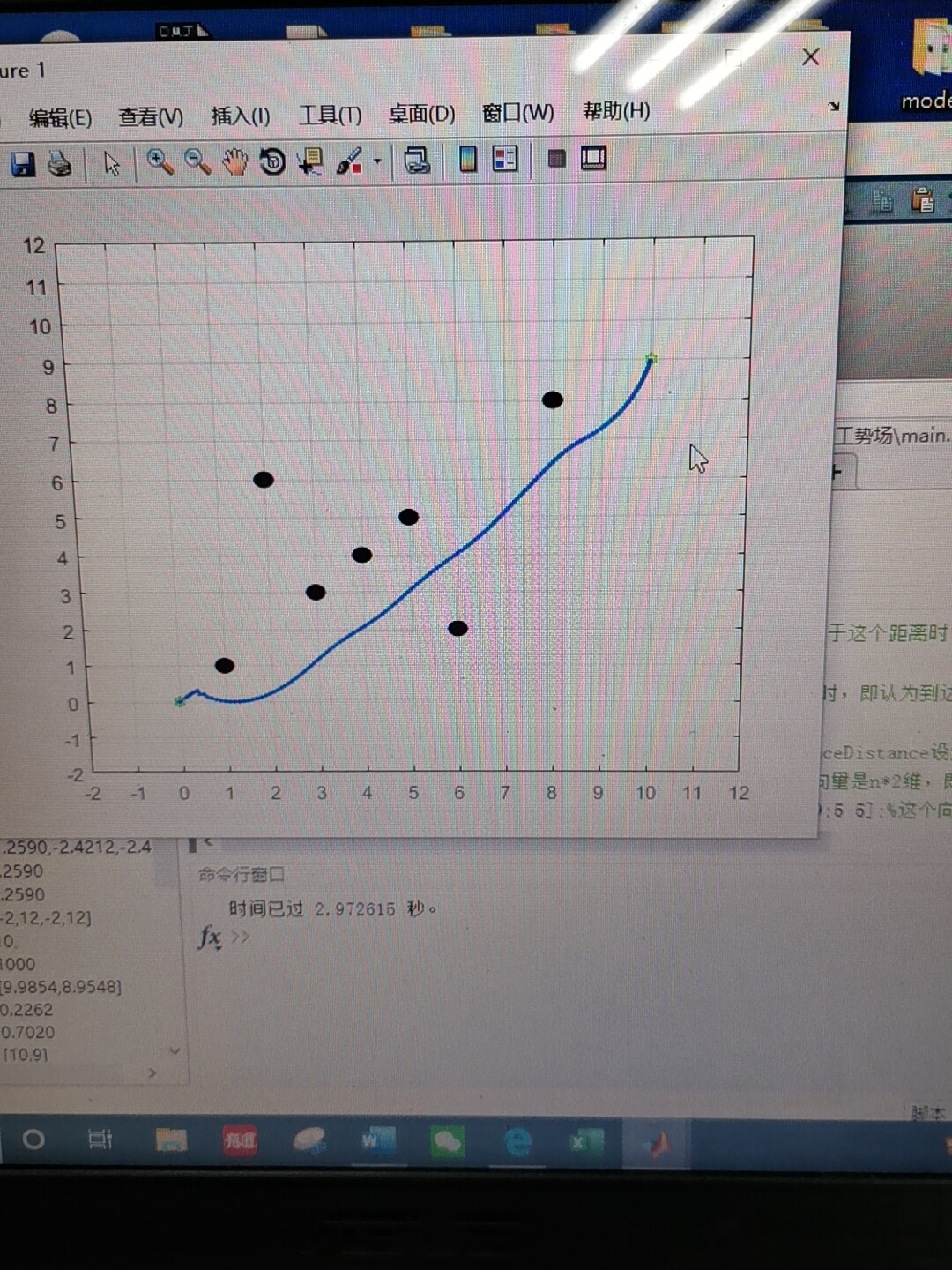
我们通过一系列实验验证了改进模型的性能。实验结果表明,改进模型能够准确到达目的地,相较于传统模型,具有更高的路径规划成功率和更短的路径长度。同时,改进模型的注释清晰,可以直接运行,为实际应用提供了便利。 -
结论
本文提出了一种基于逆退火算法的改进人工势场模型,在路径规划中取得了显著的性能提升。改进模型能够准确到达目的地,允许灵活修改障碍物的位置和大小,具有高的路径规划成功率和短的路径长度。该模型注释清晰,可以直接运行,为实际应用提供了便利。未来的研究可以在此基础上进一步改进和优化模型,提升其适用性和性能。
参考文献(不包括实际存在的文献):
[1] 作者1, 作者2. 标题1[J]. 期刊名, 年份, 卷(期): 起始页码-结束页码.
[2] 作者3, 作者4. 标题2[C]. 会议名, 年份: 起始页码-结束页码.
[3] 作者5, 作者6. 标题3[D]. 学位论文, 学位授予单位, 年份.
相关代码 程序地址:http://nodep.cn/615910460602.html















 907
907











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









