







simulink建模
电池用simulink建模,模型从网上找的。

input current好像是电动公交的充放电电流,我有点记不清楚了。
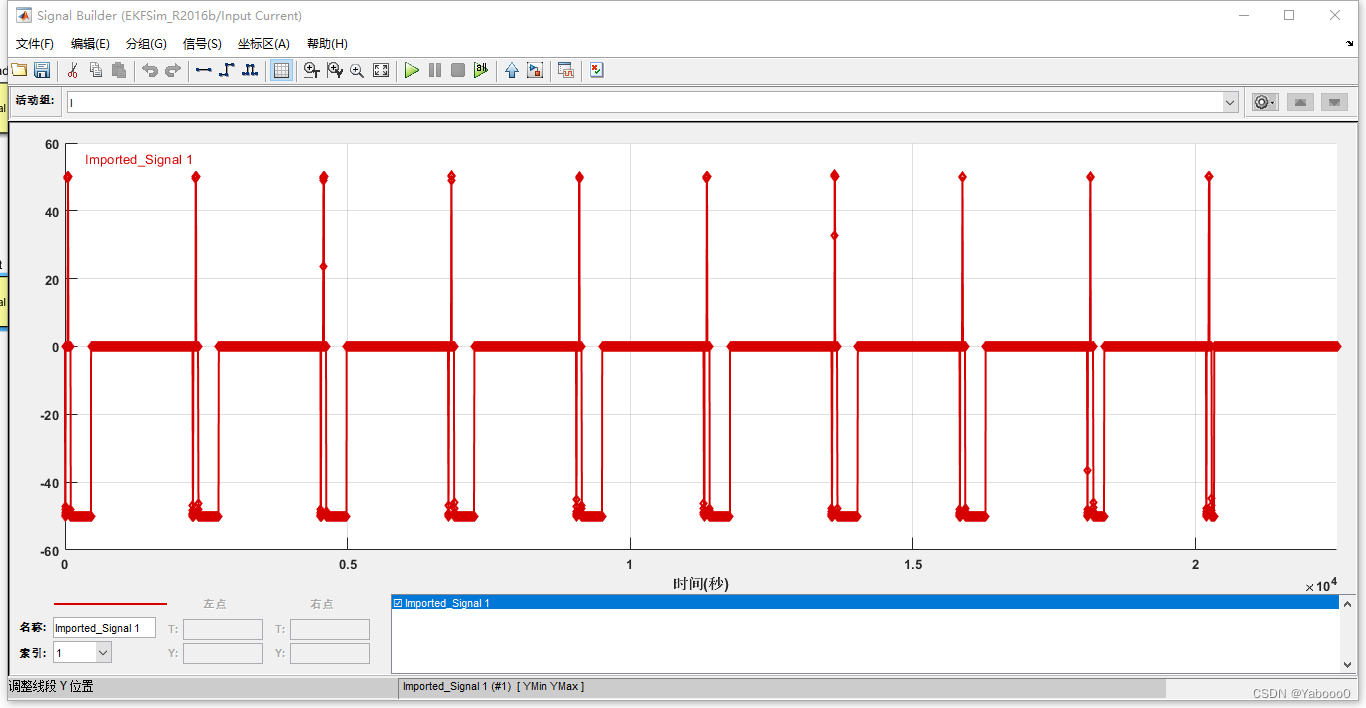
输入电流
电池用simulink建模,模型从网上找的。
input current好像是电动公交的充放电电流,我有点记不清楚了。
输入电流
 165
165











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言




 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章





















