






首先,我们对比下Gemini2 L与 Realsense D455的差异。
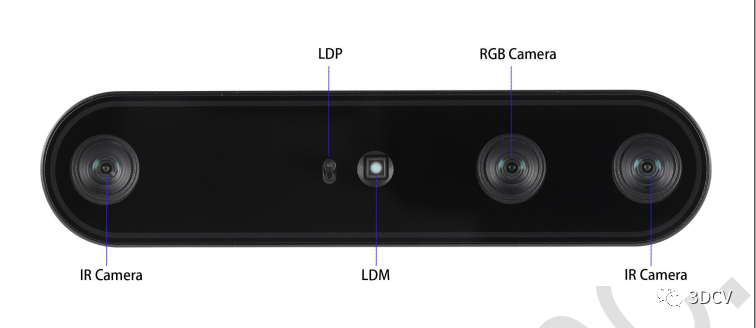
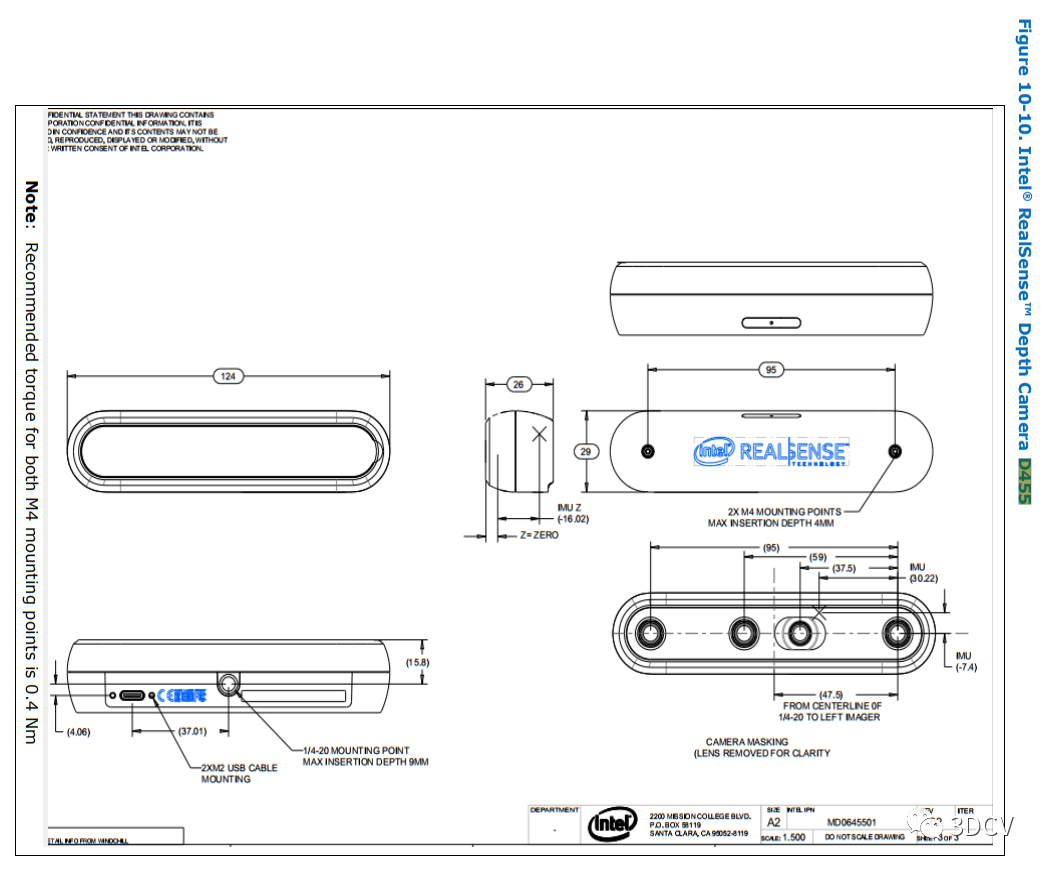
一 Gemini2 L外观展示


我认为其中几个重要的术语描述表:
| 术语 | 描述 |
|---|---|
| IR Camera | 红外相机,或红外摄像头 |
| LDMP/LDM | 激光模组,也称红外投影仪(IR projector)等,用于发射结构光图案 |
| Depth Camera | 只包含深度成像模组及对外接口,其中深度成像模组一般由红外投影仪、红外相机以及深度计算处理器组成 |
| PS | Proximity Sensor, 一种接近感应器,用于激光安全保护 |
| LDP | 接近传感器(Proximity Sensor) ,用于激光安全保护以及测距功能 |
| FoV | 视场角,用于描述相机观测给定场景的角度范围,主要有水平视场角(HFoV)、垂直视场角(V FoV)和对角线视场角(D FoV)三种 |
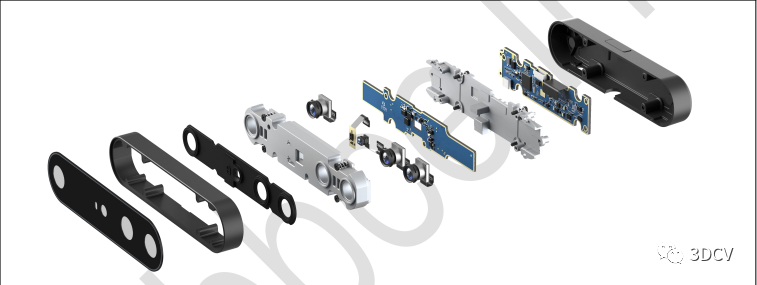
二 双目结构光模组成像基本原理
Gemini 2 系列是基于双目 3D 成像技术的深度相机,主要包括左红外相机(IR Left)、右红 外相机(IR Right)、一个激光投射模组(LDM)以及深度计算处理器(MX6600)。激光投射模组用 于向目标场景(Scene)投射结构光图案(散斑图案),左红外相机以及右红外相机分别采集目标的 左红外结构光图像以及右红外结构光的散斑图,深度计算处理器接收左红外结构光图像、右红外 结构光图像后执行深度计算算法并输出目标场景的深度图像
三 双目3D相机模组参数介绍
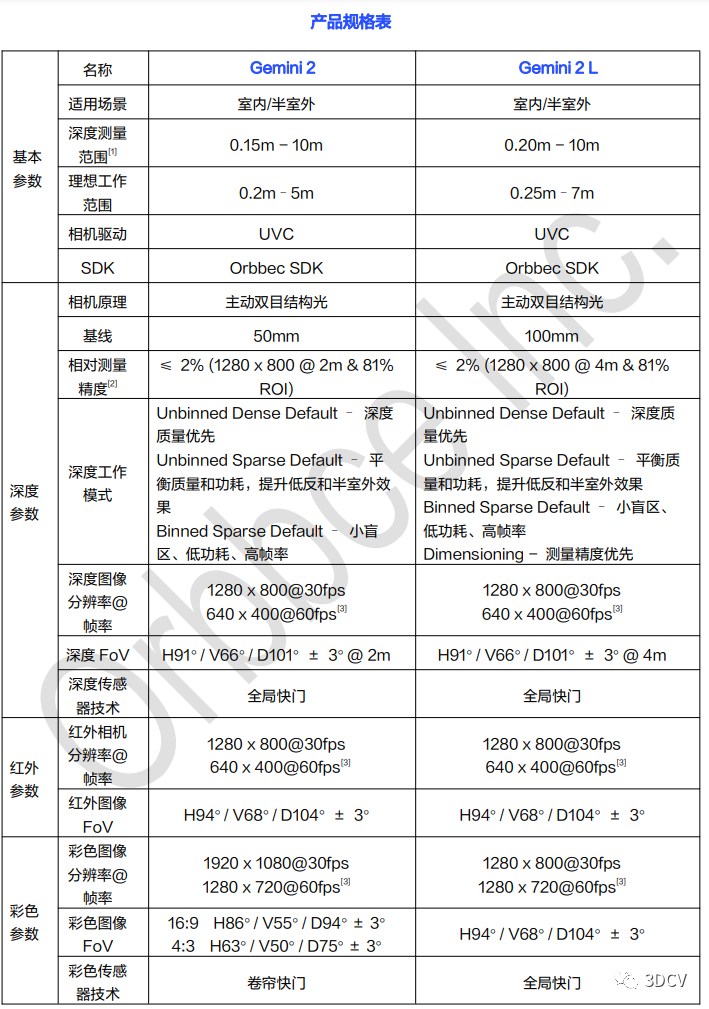
3.1 红外相机参数表
| 参数 | Gemini2 L |
|---|---|
| 有效像素比 | 1280 x 800 |
| 长宽比 | 16:10 |
| 对焦方式 | 定焦 |
| 快门类型 | global shutter |
| 信号接口 | MIPI |
| 水平FoV | 94° |
| 垂直FoV | 68° |
| 对角线FoV | 104° |
| FoV误差 | ±3.0° |
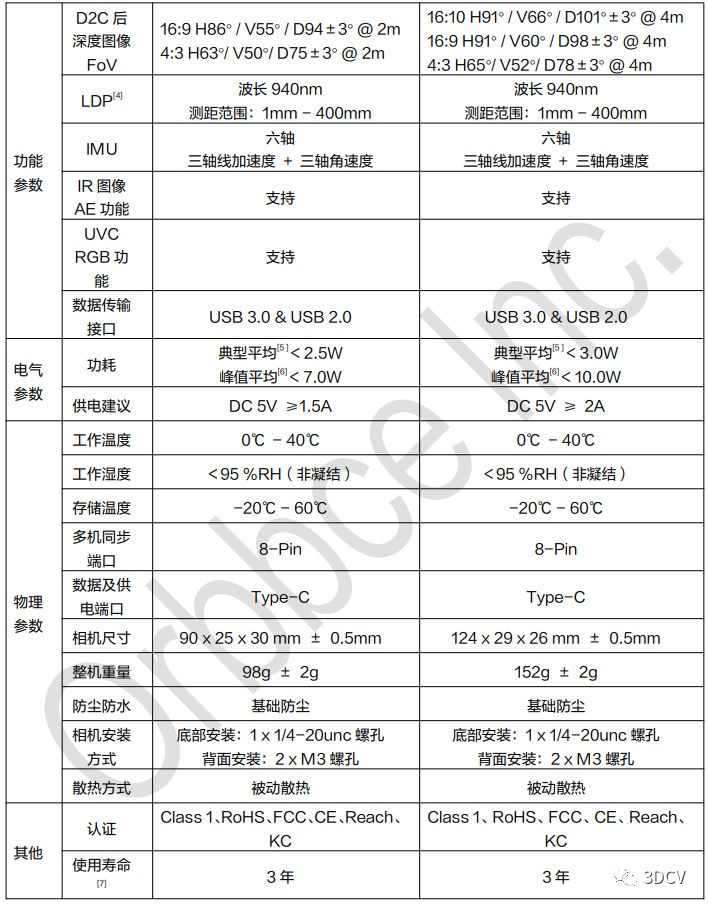
3.2 激光模组
激光模组(LDM),也称激光发射模组,由垂直腔面发射激光器阵列和光斑扩散器组成。通过在场景上投射静态红外图案以增加低质感场景的质感,提高了 3D 相机系统探测深度信息的能力。正常情况下,Gemini 2 系列激光模组符合 class 1 类激光安全性。
3.3 彩色相机
彩色相机参数表
| 参数 | Gemini2 L |
|---|---|
| 有效像素比 | 1280 x 800 |
| 长宽比 | 16:10 |
| 格式 | MJPEG & YUYV |
| 对焦方式 | 定焦 |
| 快门类型 | global shutter |
| 信号接口 | MIPI |
| 水平FoV | 94° |
| 垂直FoV | 68° |
| 对角线FoV | 104° |
| FoV误差 | ±3.0° |
3.4 接近传感器(LDP)
Gemini 2 系列支持 LDP,LDP 对靠近物体进行检测,用于实现激光安全保护。
Gemini 2 L:LDP 保护标准为≤15cm。
LDP 功能测试方法如下:当挡板靠近 3D 相机时,系统将自动调暗乃至关闭激光以实现激光保护,此时IR图像亮度值将会降低,当亮度小于设定值,说明激光安全保护功能正常。当挡板去掉后激光应正常开启,IR图像会变亮,再次判断亮度值是否大于设定值。
四 题外话:双目基线对精度的影响
首先,Gemini2 L相比于Gemini2一个显著的变化,便是增大了两个IR Camera之间的基线。
我们先来看一下一本书中对于基线对精度的影响的分析(这里考考大家,有知道书名的,欢迎文章底部留言,答对了我们会赠送知识星球半价优惠券):
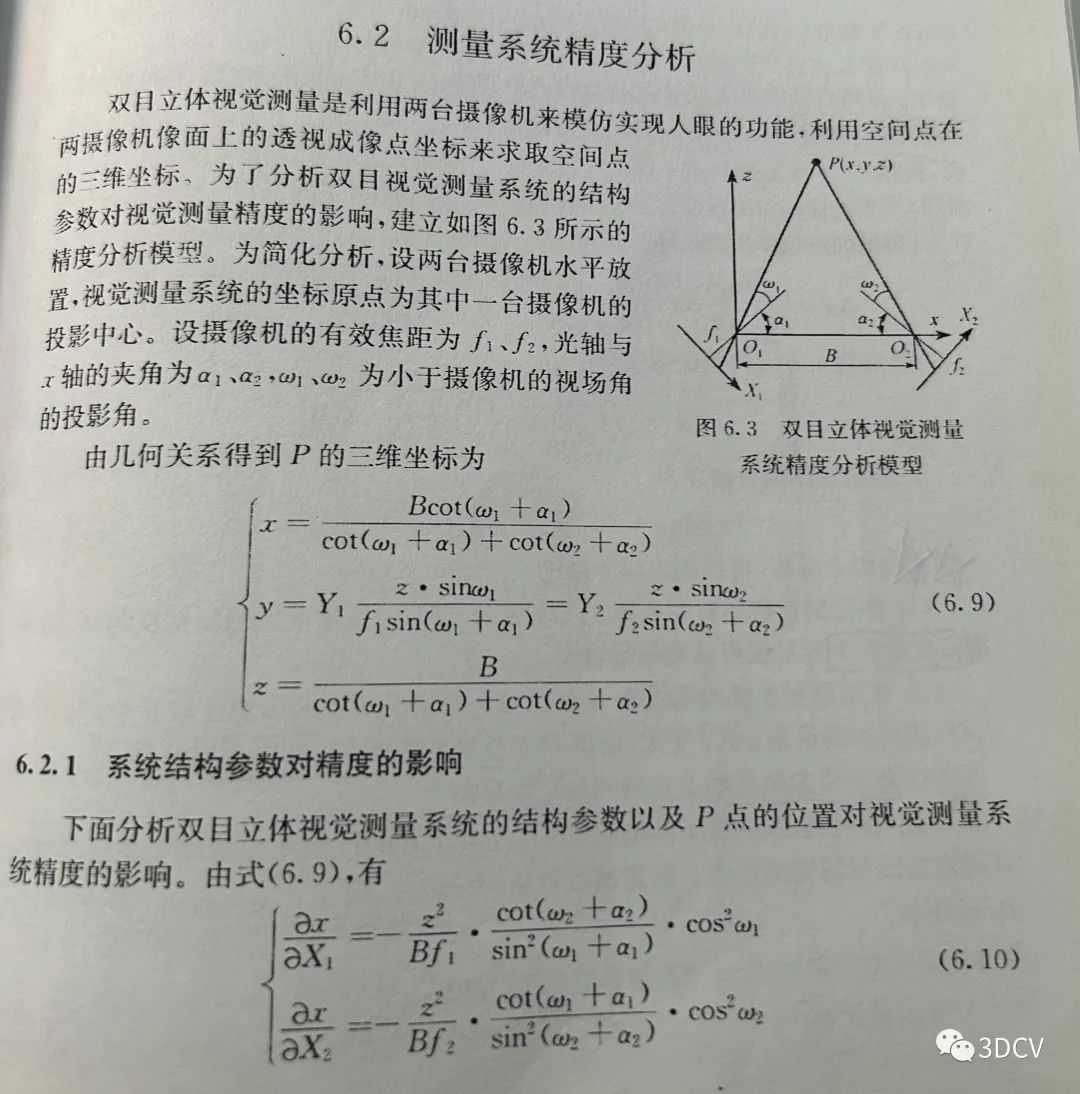
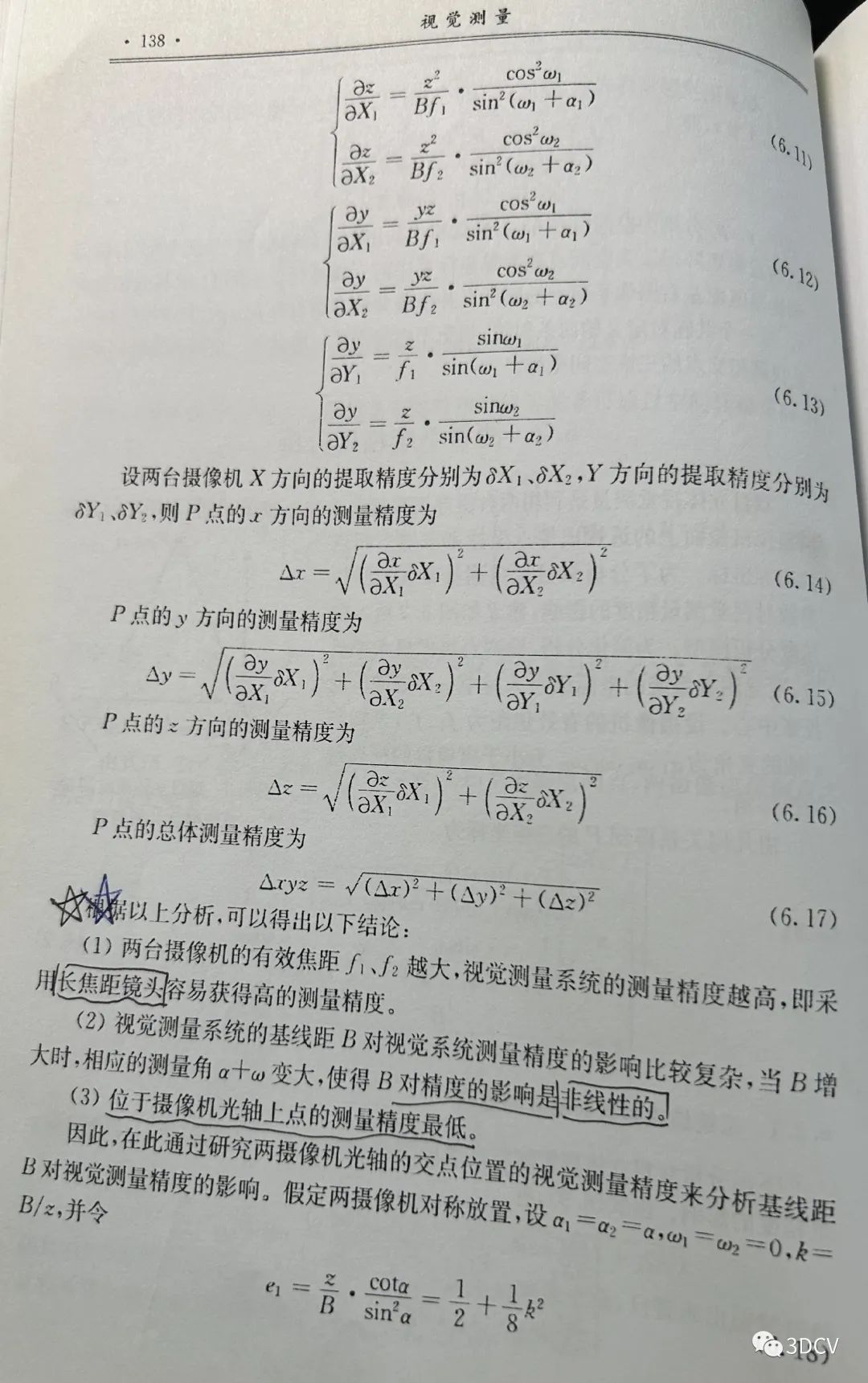
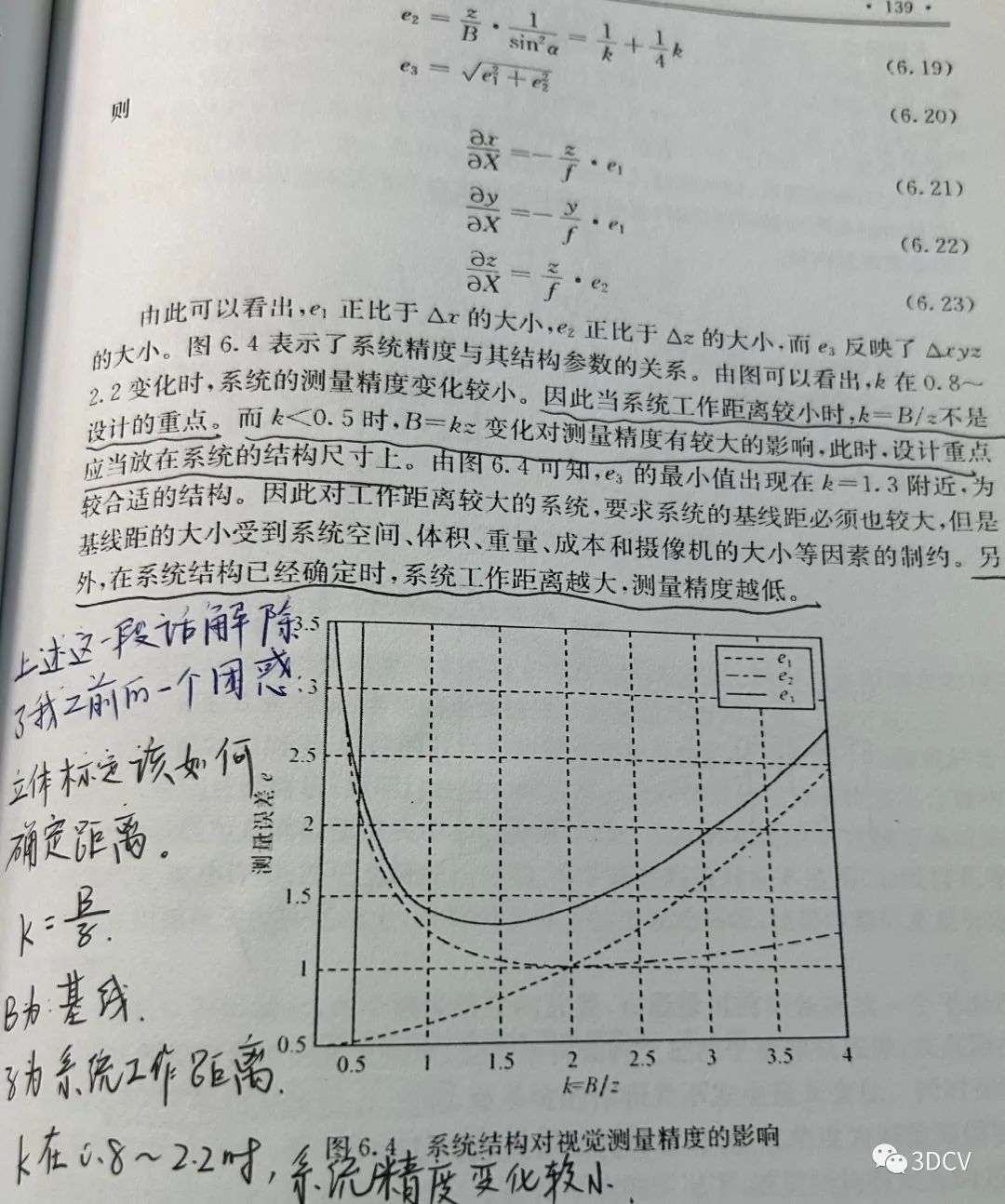
总结来说,也就是基线对测量精度是有影响的,但是也是非线性的。
参考文献:
[1]奥比中光产品说明手册
—END—高效学习3D视觉三部曲
第一步 加入行业交流群,保持技术的先进性
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶方向,细分群包括:[工业方向]三维点云、结构光、机械臂、缺陷检测、三维测量、TOF、相机标定、综合群;[SLAM方向]多传感器融合、ORB-SLAM、激光SLAM、机器人导航、RTK|GPS|UWB等传感器交流群、SLAM综合讨论群;[自动驾驶方向]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器讨论群、多传感器标定、自动驾驶综合群等。[三维重建方向]NeRF、colmap、OpenMVS等。除了这些,还有求职、硬件选型、视觉产品落地等交流群。大家可以添加小助理微信: dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。
第二步 加入知识星球,问题及时得到解答
针对3D视觉领域的视频课程(三维重建、三维点云、结构光、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业、项目对接为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:「3D视觉从入门到精通」
学习3D视觉核心技术,扫描查看,3天内无条件退款
第三步 系统学习3D视觉,对模块知识体系,深刻理解并运行
如果大家对3D视觉某一个细分方向想系统学习[从理论、代码到实战],推荐3D视觉精品课程学习网址:www.3dcver.com
基础课程:
[1]面向三维视觉算法的C++重要模块精讲:从零基础入门到进阶
[2]面向三维视觉的Linux嵌入式系统教程[理论+代码+实战]
工业3D视觉方向课程:
[1](第二期)从零搭建一套结构光3D重建系统[理论+源码+实践]
SLAM方向课程:
[1]深度剖析面向机器人领域的3D激光SLAM技术原理、代码与实战
[1]彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战
[2](第二期)彻底搞懂基于LOAM框架的3D激光SLAM:源码剖析到算法优化
[3]彻底搞懂视觉-惯性SLAM:VINS-Fusion原理精讲与源码剖析
[4]彻底剖析室内、室外激光SLAM关键算法和实战(cartographer+LOAM+LIO-SAM)
视觉三维重建
[1]彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进)
自动驾驶方向课程:
[1] 深度剖析面向自动驾驶领域的车载传感器空间同步(标定)
[2] 国内首个面向自动驾驶目标检测领域的Transformer原理与实战课程
[4]面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
[5]如何将深度学习模型部署到实际工程中?(分类+检测+分割)

















 4687
4687

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









