






作者:沉默王二
大家好,我是二哥呀。
懂的都懂,比亚迪可以说是 23 届秋招的神,但对于 24 届的小伙伴来说,就没有那么幸运了,从网上爆出来的 24 届校招要求来看,真的是非常苛刻了。
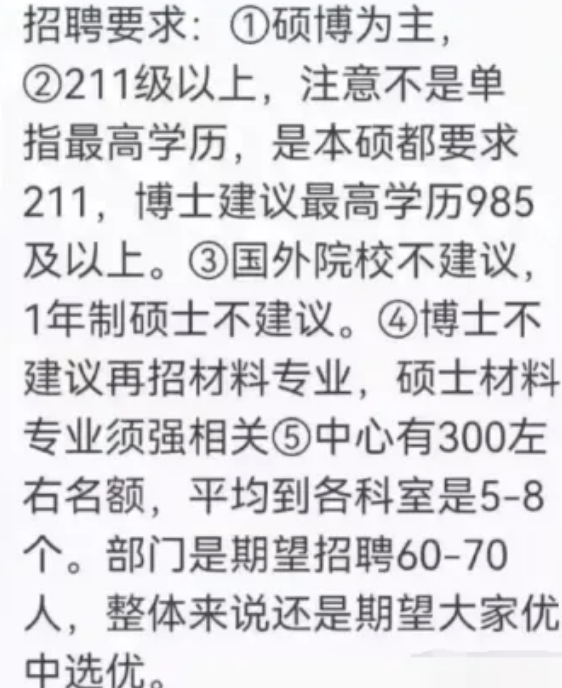
尤其是第 2 条,不再只要求最高学历是 211,而是本硕都要求是 211!
讲良心话,我能理解这样的要求,毕竟供大于求,学校扩招,学历贬值,但我还是挺讨厌这种硬性要求的。难不成明年就变成本硕 985 以上?
之前有读者留言说,“现在的大学生挺厉害的,5 年前刚毕业还没有他会的多,都是工作上学的。”
我是深有同感,2010 年找实习的时候,真的就只会 hello world,那时候就真的只学了 Java SE 最基础的部分,印象中多人聊天室都不会做,只停留在一对一的客户端和服务器端通信,用的 Java Swing 做的界面,Socket 和 SocketServer 做的通讯,多线程都没加。
关键是,不挑学历!
面试也很简单,压根没有八股,只要你不是太水,连自我介绍都答不下来,基本上都会给机会。进入公司公司后,会再给两个月的上机考试+三次笔试机会,如果能完成,你就留下。
一切通过实战能力来检验,现在回想起来,真的挺感谢当时公司给的机会,否则我不知道现在的我在干嘛。
现在呢?
不仅学历有要求,算法你要刷,否则笔试就不会过;八股你要背,否则面试的时候造不了火箭;项目你得有,否则没办法和面试官来回拉扯。
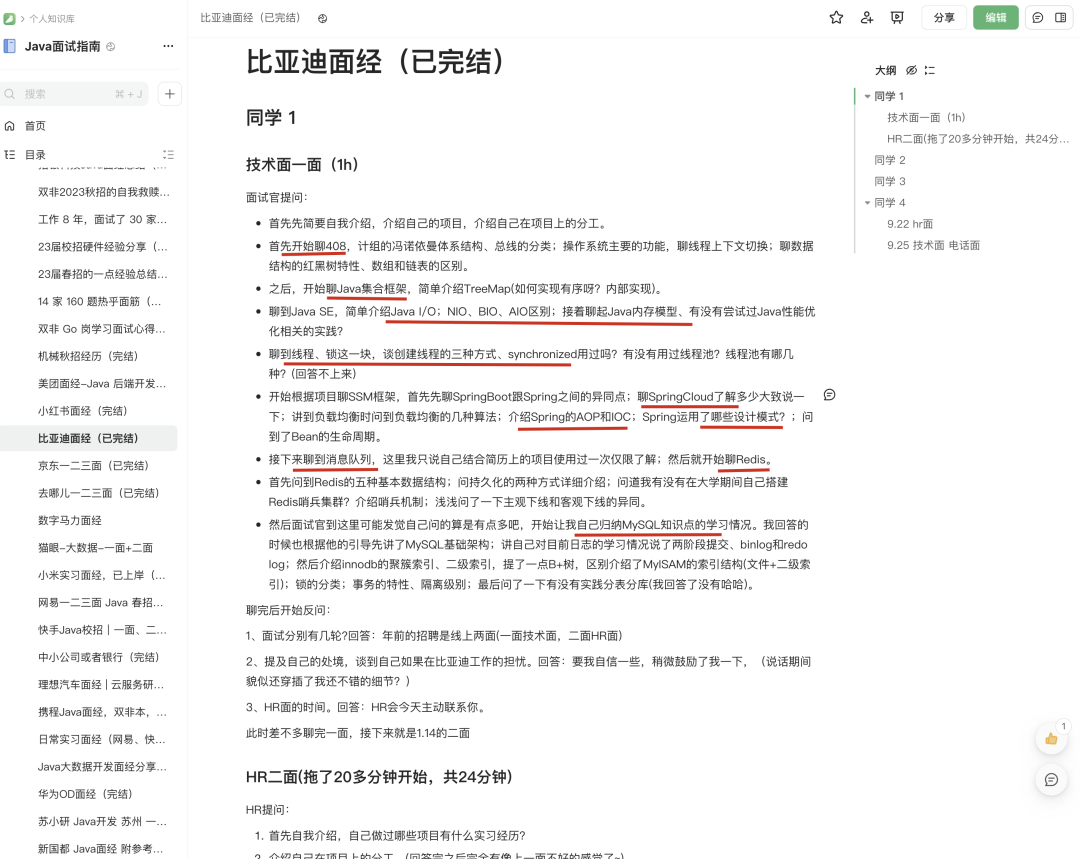
大家可以通过上面这份比亚迪面经感受一下,技术面涉及的知识点非常广:
408,这属于计算机考研的内容,包括数据结构与算法、操作系统、计算机组成原理、计算机网络
Java 基础,包括集合框架、IO、并发编程、以及 JVM 的性能优化
Spring 全家桶,Spring 的 AOP 和 IoC 原理、Spring Boot 的自动装配机制、Spring 用了哪些设计模式、Bean 的生命周期,基本上都是面试必问
Redis,基本数据结构、哨兵机制、持久化等等
MySQL,binlog 和 redo log 的区别、InnoDB 的聚簇索引、B+树、锁、事务、分库分表等等
消息队列,像 RocketMQ、RabbitMQ、Kafka 等等,至少要会用一种,包括死信、异步等等
真的,现在的学生压力比前几年大太多了,就不说我那个时候,22 年以前的不少小伙伴,都是大三下半学期突击一下,然后秋招就轻松上岸了,相信在职 1-2 年的工作党都会有这种感受。
行业的门槛会越来越高,不再只是你喜欢就能入行,首先你的学历就要达到,达不到你连笔试和面试的机会都没有,这就是当前赤裸裸的现状,因为供需不平衡。
以前的“学历无用论”或者“考研无用论”还是能站得住脚的,因为有不少公司不卡学历这块,大多数小伙伴只要工作一两年,能力成长的飞快。
相信大多数工作党都会有这种体感,尤其是处在核心项目组的小伙伴,一年半载学到的东西,比大学四年+研究生三年都学的多。
但现在的不少公司真的很无耻,把学历来作为最大的门槛。
于是不少本科阶段就具备工作能力的小伙伴,不得不再去读三年研究生,然后和导师 battle 三年,被论文折磨,被实验室折磨。
历史的车轮滚滚向前,过去是过去,现在是现在,我们普通人所能做的,就是抓住机会,在考研和就业之间做出最有利于自己的选择。
如果你学习成绩不错,家里也支持,自己也需要学历提升和时间缓冲,那么考研就是最好的选择,别想太多。
如果你对考研无感,就要早做准备,大一就要提前规划好,把 Java 后端四大件学扎实,做两个实战项目,能实习大三结束前一定要去,争取在秋招和春招的时候拿到一份不错的 offer,还是有不少公司愿意给机会的,双非本去大厂的小伙伴也是有的。
一个萝卜一个坑,比亚迪 23 届招的人多,24 届肯定就会少,这是我们大家都能想通的道理,时间也是一种不可再生的资源。
当然了,作为一个有理想和抱负的人,我希望所有的公司都能改善自己的招聘流程,不要把学历这一关直接卡死,而是通过实习啊、试用啊、笔试啊、上机考试啊,筛选出真正德艺双馨的人才。
—END—高效学习3D视觉三部曲
第一步 加入行业交流群,保持技术的先进性
目前工坊已经建立了3D视觉方向多个社群,包括SLAM、工业3D视觉、自动驾驶方向,细分群包括:
[工业方向]三维点云、结构光、机械臂、缺陷检测、三维测量、TOF、相机标定、综合群;
[SLAM方向]多传感器融合、ORB-SLAM、激光SLAM、机器人导航、RTK|GPS|UWB等传感器交流群、SLAM综合讨论群;
[自动驾驶方向]深度估计、Transformer、毫米波|激光雷达|视觉摄像头传感器讨论群、多传感器标定、自动驾驶综合群等。
[三维重建方向]NeRF、colmap、OpenMVS、MVSNet等。
[无人机方向]四旋翼建模、无人机飞控等。
除了这些,还有求职、硬件选型、视觉产品落地等交流群。
大家可以添加小助理微信: dddvisiona,备注:加群+方向+学校|公司, 小助理会拉你入群。

第二步 加入知识星球,问题及时得到解答
3.1 「3D视觉从入门到精通」技术星球
针对3D视觉领域的视频课程(三维重建、三维点云、结构光、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、源码分享、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答等进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业、项目对接为一体的铁杆粉丝聚集区,6000+星球成员为创造更好的AI世界共同进步,知识星球入口:「3D视觉从入门到精通」
学习3D视觉核心技术,扫描查看,3天内无条件退款
3.2 3D视觉岗求职星球
本星球:3D视觉岗求职星球 依托于公众号「3D视觉工坊」和「计算机视觉工坊」、「3DCV」,旨在发布3D视觉项目、3D视觉产品、3D视觉算法招聘信息,具体内容主要包括:
收集汇总并发布3D视觉领域优秀企业的最新招聘信息。
发布项目需求,包括2D、3D视觉、深度学习、VSLAM,自动驾驶、三维重建、结构光、机械臂位姿估计与抓取、光场重建、无人机、AR/VR等。
分享3D视觉算法岗的秋招、春招准备攻略,心得体会,内推机会、实习机会等,涉及计算机视觉、SLAM、深度学习、自动驾驶、大数据等方向。
星球内含有多家企业HR及猎头提供就业机会。群主和嘉宾既有21届/22届/23届参与招聘拿到算法offer(含有海康威视、阿里、美团、华为等大厂offer)。
发布3D视觉行业新科技产品,触及行业新动向。

第三步 系统学习3D视觉,对模块知识体系,深刻理解并运行
如果大家对3D视觉某一个细分方向想系统学习[从理论、代码到实战],推荐3D视觉精品课程学习网址:www.3dcver.com
科研论文写作:
基础课程:
[1]面向三维视觉算法的C++重要模块精讲:从零基础入门到进阶
[2]面向三维视觉的Linux嵌入式系统教程[理论+代码+实战]
工业3D视觉方向课程:
[1](第二期)从零搭建一套结构光3D重建系统[理论+源码+实践]
SLAM方向课程:
[1]深度剖析面向机器人领域的3D激光SLAM技术原理、代码与实战
[2]彻底剖析激光-视觉-IMU-GPS融合SLAM算法:理论推导、代码讲解和实战
[3](第二期)彻底搞懂基于LOAM框架的3D激光SLAM:源码剖析到算法优化
[4]彻底搞懂视觉-惯性SLAM:VINS-Fusion原理精讲与源码剖析
[5]彻底剖析室内、室外激光SLAM关键算法和实战(cartographer+LOAM+LIO-SAM)
机器人导航与路径规划
[1]移动机器人规划控制入门与实践:基于Navigation2
视觉三维重建:
[2]基于深度学习的三维重建MVSNet系列 [论文+源码+应用+科研]
自动驾驶方向课程:
[1] 深度剖析面向自动驾驶领域的车载传感器空间同步(标定)
[2] 国内首个面向自动驾驶目标检测领域的Transformer原理与实战课程
[4]面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
[5]如何将深度学习模型部署到实际工程中?(分类+检测+分割)
无人机:
[1] 零基础入门四旋翼建模与控制(MATLAB仿真)[理论+实战]

















 872
872

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









