



 本文介绍了LOAM的局限性及其改进方法,重点阐述了LIO-SAM的优势,包括特征检测、多传感器融合和回环检测。文章还提到针对LIO-SAM复杂理论和代码的课程设计,旨在帮助初学者理解和实现这一先进SLAM算法。
本文介绍了LOAM的局限性及其改进方法,重点阐述了LIO-SAM的优势,包括特征检测、多传感器融合和回环检测。文章还提到针对LIO-SAM复杂理论和代码的课程设计,旨在帮助初学者理解和实现这一先进SLAM算法。
LOAM是目前为止激光里程计(LO)领域最经典最广泛使用的方法,堪称LO领域的baseline,至今仍在KITTI数据集上名列前茅。但是它存在诸多问题,比如:它直接存储全局体素地图而不是局部地图,从而很难执行回环检测以修正漂移;没有很好地使用IMU、GPS等测量融合进行位姿修正;并且体素地图的使用效率会随时间降低。
后续有很多研究者提出了各种改进方法提高LOAM在不同场景下的性能,如FAST-LIO使用EKF整合LiDAR和IMU的测量;LeGO-LOAM引入地面分割和回环检测进一步提高UGV的定位和建图性能;但其中效果较好的当属LIO-SAM,LIO-SAM是一种紧耦合的激光-惯性里程计方法,LIO-SAM可以说是LO的理想框架,其继承了LOAM特征检测和ICP匹配的稳定性,实现了激光雷达-IMU-GPS的多传感器融合,引入了回环检测方法修正全局漂移,利用了多种方法提高了SLAM算法的精度。
但是LIO-SAM中涉及到很多内容和理论的推导,不仅包括LOAM中原有的特征检测、特征匹配、噪声去除等内容,还使用了因子图来组织整个系统,其代码中使用了GTSAM包进行建模;除此之外,由于其紧耦合的设计,还使用了IMU预积分的知识,这部分知识往往是复杂的,对数学公式的的推导要求较高。
虽然网上也有一些LIO-SAM的论文讲解,但大部分都是对论文的简单翻译;虽然也有一些视频教程,但知识体系比较零散,铺天盖地的讲解导致很多初学者不能很好的把握其中的关键;关于其代码的讲解更是寥寥无几,导致很多同学很难理解其代码架构,更别提自己动手书写。
基于此,我们「3D视觉从入门到精通」知识星球特地增加了「如何轻松拿捏LIO-SAM?」系列视频课程,希望通过这门课,大家能对LIO-SAM的理论和代码有一些清晰的认识,自己能够真正地理解其算法思路,并进一步学习到一些阅读其他相关论文或代码的方法。
1.课程讲师
K.Fire,哈尔滨工业大学本科毕业保研至中国科学院大学攻读硕士,主要专注于3D激光SLAM、动态SLAM研究,CSDN资深博主,近4000粉丝量,热衷于知识分享。
2.课程大纲
第一章:绪论
LOAM系列算法介绍及比较
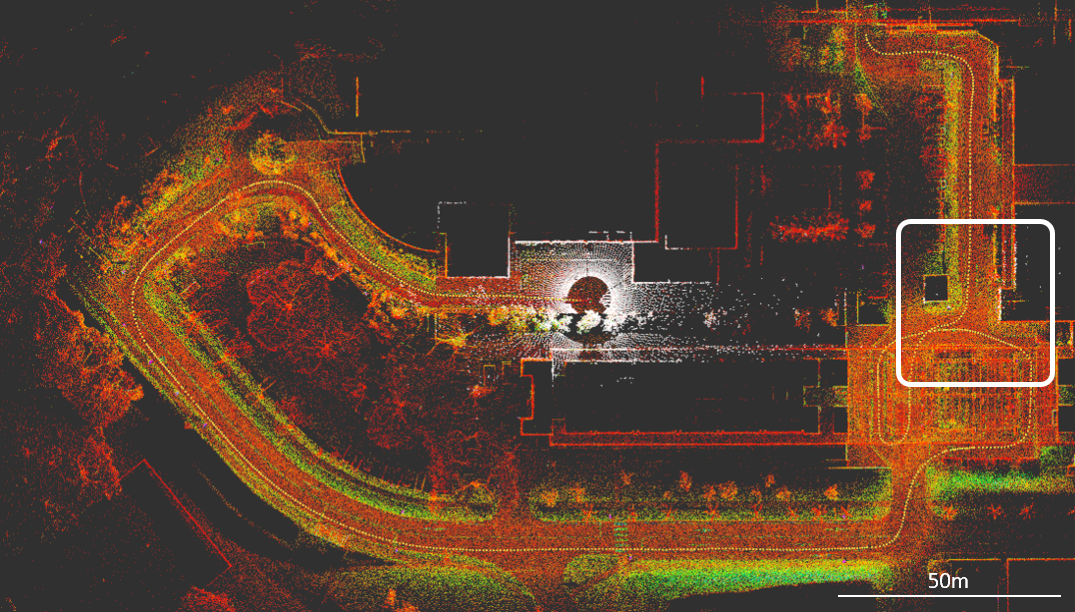
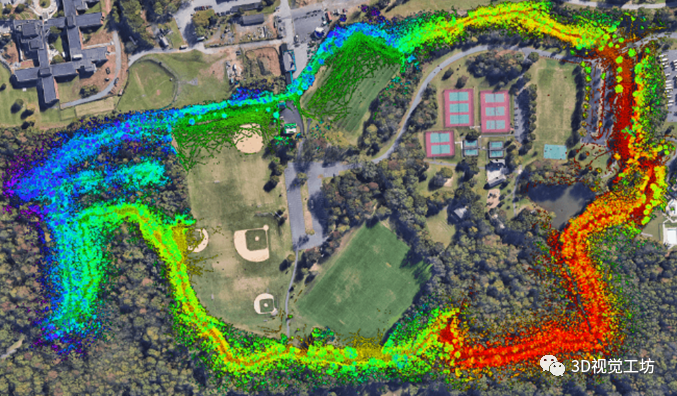
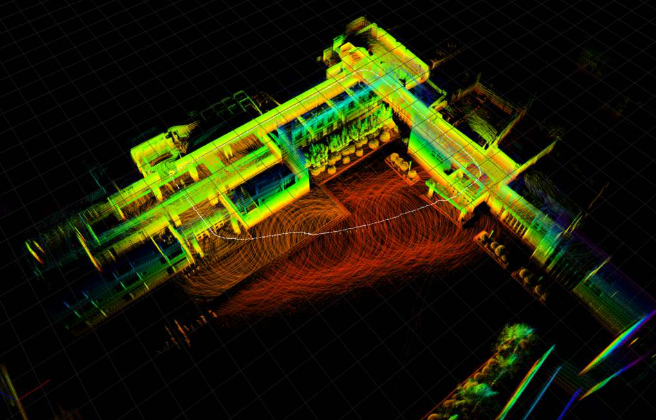
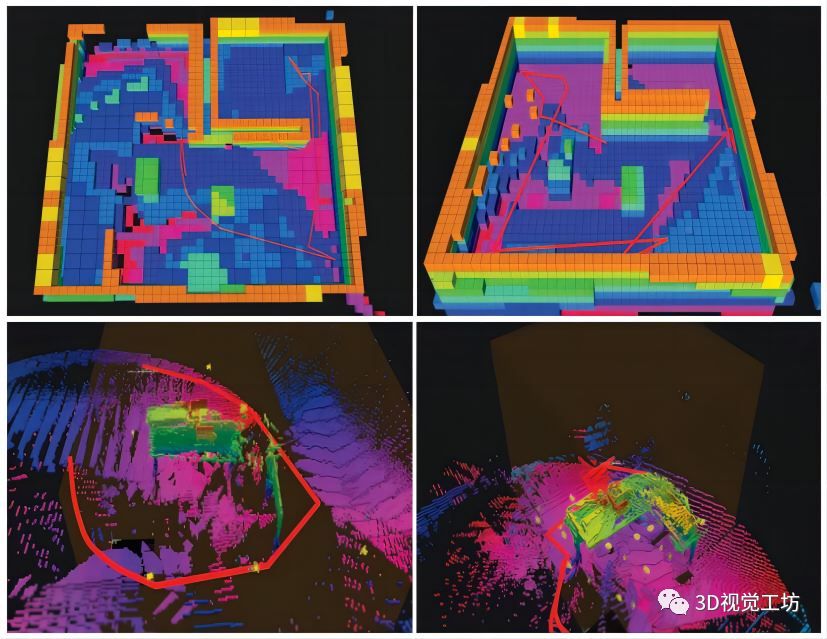
LIO-SAM优势及效果展示
第二章:预备知识
矩阵基础
三维刚体变换
李群与李代数
非线性优化
拓展:卡尔曼滤波
第三章:LOAM论文及原理详解
LOAM论文带读
ICP算法原理与发展、SVD分解
LOAM代码速通、PCA算法
第四章:LeGO-LOAM、LIO-SAM论文及原理讲解
LeGO-LOAM原理讲解
LeGO-LOAM代码速通
LIO-SAM原理讲解
第四章:LIO-SAM代码详解
前端-GTSAM、IMU预积分、位姿融合
后端-点云配准、建图、回环检测
第五章:实战及总结
ROS系统简介及代码运行
总结、未来工作
本课程(星球专属课)自2024年1月28日开课,每周更新一章
3.如何学习本门课程?

4.课程收获及亮点
(1)对LIO-SAM算法的原理及应用有更深刻地理解;
(2)对LOAM系列的传统激光3D SLAM算法的原理及局限有更深入的理解,了解到常见的分析和改进方法;
(3)学习到以初学者的角度,如何高屋建瓴的把握一类算法的学习方法和学习经验,了解作为初学者如何高效吃透一种算法;
(4)掌握代码阅读及实现的方法,更加透彻的掌握代码阅读及实现过程。
5.星球成员其他福利
除了学习本门课程LIO-SAM,我们还有享受以下星球福利
(1)优质的学习圈子
星球汇集了国内外各个高校的研究生、博士生,包括但不限于清华大学、上海交通大学、华中科技大学、武汉大学、南京大学、北京理工大学、北京航空航天大学;以及国外留学的小伙伴,主要就读于南加州大学、墨尔本大学、慕尼黑工业大学、亚琛工业大学等。除此之外,还有很多一线工作的算法工程师、开发人员,包括但不限于百度、旷视、华为、奥比中光、云从、阿丘科技等。
(2)各种SLAM学习文章及代码
星球中不仅包含3D激光SLAM的各种算法及代码讲解,另外涵盖了多模态融合SLAM、视觉SLAM、三维重建、相机标定等多种领域讲解专栏,更有如ORB-SLAM3、Vins-Fusion等各种经典框架的详细讲解视频教程,在星球进行提问可向包括讲师在内的多位领域大牛进行提问,并获得及时解答。
(3)免费学习星球内其他课程
加入星球后可免费学习星球专属课程:多模态融合SLAM、ORB-SLAM3、Vins-Fusion等15+门星球专属课程,如下所示:
扫码即可学习本门课程


















 928
928

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









