










OpenCV
- OpenCV是一个开源的计算机视觉库,可以从 http://opencv.org 获取。
- OpenCV 库用C语言和 C++ 语言编写,可以在 Windows、Linux、Mac OS X 等系统运行。同时也在积极开发 Python、Java、Matlab 以及其他一些语言的接口,将库导入安卓和 iOS 中为移动设备开发应用。
- OpenCV 设计用于进行高效的计算,十分强调实时应用的开发。它由 C++ 语言编写并进行了深
度优化,从而可以享受多线程处理的优势。 - OpenCV 的一个目标是提供易于使用的计算机视觉接口,从而帮助人们快速建立精巧的视觉应用。
- OpenCV 库包含从计算机视觉各个领域衍生出来的 500 多个函数,包括工业产品质量检验、医学图像处理、安保领域、交互操作、相机校正、双目视觉以及机器人学
opencv大坑之BGR
opencv对于读进来的图片的通道排列是BGR,而不是主流的RGB!谨记!
#opencv读入的矩阵是BGR,如果想转为RGB,可以这么转
img4 = cv2.imread('1.jpg')
img4 = cv2.cvtColor(img4,cv2.COLOR_BGR2RGB)
OpenCV与其他算法比较
- 除了opencv读入的彩色图片以BGR顺序存储外,其他所有图像库读入彩色图片都以RGB存储。
- 除了PIL读入的图片是img类之外,其他库读进来的图片都是以numpy 矩阵。
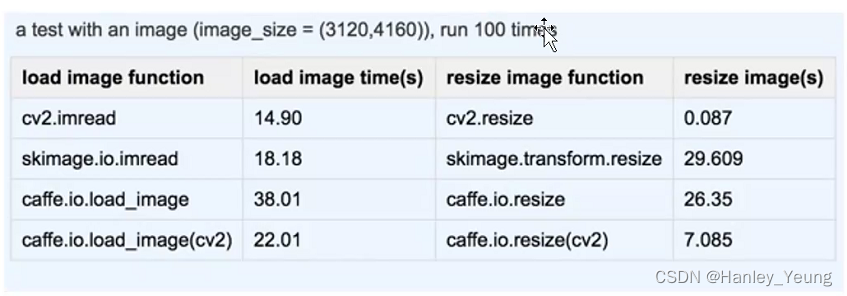
- 各大图像库的性能,最好的OpenCv,无论是速度还是图片操作的全面性,都属于碾压的存在,毕竟他是一个巨大的cv专用库。
OpenCV常见算法
- 图像的基本操作读取、显示、存储:通过调用OpenCV中的cv2.imread(),cv2.imshow(),cv2.write()分别实现。
- 在OpenCV中实现将彩色像素转化为灰度像素。图像的几何变换:平移、缩放、旋转、插值(最近邻、双线性)。
- 对比增强:线性变换、伽马变换、直方图均衡化。
- 边缘检测:Sobel、Canny
- 图像的二维滤波:cvFilter2D
线性回归
什么是线性回归?
举个例子,某商品的利润在售价为2元、5元、10元时分别为4元、10元、20元,我们很容易得出商品的利润与售价的关系符合直线:y=2x.
在上面这个简单的一元线性回归方程中,我们称“2”为回归系数,即斜率为其回归系数。
回归系数表示商品的售价(x)每变动一个单位,其利润(y)与之对应的变动关系。
线性回归表示这些离散的点**总体上“最逼近”**哪条直线。
线性回归–最小二乘法(Least Square Method)
- 它通过最小化误差的平方和,寻找数据的最佳函数匹配。
- 利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方
和为最小。 - 假设我们现在有一系列的数据点(xi,yi) (i=1,…,m),那么由我们给出的拟合函数h(x)得到的估计量就
是h(xi) - 残差:ri = h(xi) – yi

- 拟合程度,用通俗的话来讲,就是我们的拟合函数h(x)与待求解的函数y之间的相似性。那么2-范数越小,自然相似性就比较高了。
由此,我们可以写出最小二乘法的定义了:

这是一个无约束的最优化问题,分别对k和b求偏导,然后令偏导数为0,即可获得极值点。


RANSAC
RANSAC思想
- 随机采样一致性(random sample consensus)。
- RANSAC是一种思想,一个求解已知模型的参数的框架。它不限定某一特定的问题,可以是计算机视觉的问题,同样也可以是统计数学,甚至可以是经济学领域的模型参数估计问题。
- 它是一种迭代的方法,用来在一组包含离群的被观测数据中估算出数学模型的参数。 RANSAC是一个非确定性算法,在某种意义上说,它会产生一个在一定概率下合理的结果,其允许使用更多次的迭代来使其概率增加。
- RANSAC的基本假设是 “内群”数据可以通过几组模型参数来叙述其数据分布,而“离群”数据则是不适合模型化的数据。 数据会受噪声影响,噪声指的是离群,例如从极端的噪声或错误解释有关数据的测量或不正确的假设。RANSAC假定,给定一组(通常很小的)内群,存在一个程序,这个程序可以估算最佳解释或最适用于这一数据模型的参数。

RANSAC与最小二乘法 - 生产实践中的数据往往会有一定的偏差。
- 例如我们知道两个变量X与Y之间呈线性关系,Y=aX+b,我们想确定参数a与b的具体值。通过实验,可以得到一组X与Y的测试值。虽然理论上两个未知数的方程只需要两组值即可确认,但由于系统误差的原因,任意取两点算出的a与b的值都不尽相同。我们希望的是,最后计算得出的理论模型与测试值的误差最小。
- 最小二乘法:通过计算最小均方差关于参数a、b的偏导数为零时的值。事实上,很多情况下,最小二乘法都是线性回归的代名词。
- 遗憾的是,最小二乘法只适合于误差较小的情况。
- 在模型确定以及最大迭代次数允许的情况下,RANSAC总是能找到最优解。(对于包含80%误差的数据集,RANSAC的效果远优于直接的最小二乘法。)
- 由于一张图片中像素点数量大,采用最小二乘法运算量大,计算速度慢。
RANSAC的步骤
RANSAC算法的输入:
- 一组观测数据(往往含有较大的噪声或无效点),
- 一个用于解释观测数据的参数化模型,比如 y=ax+b
- 一些可信的参数。
- 在数据中随机选择几个点设定为内群
- 计算适合内群的模型 e.g. y=ax+b ->y=2x+3 y=4x+5
- 把其它刚才没选到的点带入刚才建立的模型中,计算是否为内群 e.g. hi=2xi+3->ri
- 记下内群数量
- 重复以上步骤
- 比较哪次计算中内群数量最多,内群最多的那次所建的模型就是我们所要求的解
注意:不同问题对应的数学模型不同,因此在计算模型参数时方法必定不同,RANSAC的作用不在于计算模型参数。(这导致ransac的缺点在于要求数学模型已知)
这里有几个问题:
- 一开始的时候我们要随机选择多少点(n)
- 以及要重复做多少次(k)
RANSAC的参数确定
- 假设每个点是真正内群的概率为 w:



RANSAC的优缺点
- 优点:
- 它能鲁棒的估计模型参数。例如,它能从包含大量局外点的数据集中估计出高精度的参数。
- 缺点:
- 它计算参数的迭代次数没有上限;如果设置迭代次数的上限,得到的结果可能不是最优的结果,甚至可能得到错误的结果。
- RANSAC只有一定的概率得到可信的模型,概率与迭代次数成正比。
- 它要求设置跟问题相关的阀值。
- RANSAC只能从特定的数据集中估计出一个模型,如果存在两个(或多个)模型,RANSAC不能找到别的模型。
- 要求数学模型已知
最小二乘法代码部分
import pandas as pd
import matplotlib.pyplot as plt
# 读取CSV文件
sales = pd.read_csv('train_data.csv', sep='\s*,\s*', engine='python')
X = sales['X'].values # 存csv的第一列
Y = sales['Y'].values # 存csv的第二列
# 初始化赋值
s1 = 0
s2 = 0
s3 = 0
s4 = 0
n = len(X) # 使用len(X)自动获取数据长度
# 循环累加
for i in range(n):
s1 += X[i] * Y[i] # X*Y,求和
s2 += X[i] # X的和
s3 += Y[i] # Y的和
s4 += X[i] ** 2 # X的平方,求和
# 计算斜率和截距
k = (n * s1 - s2 * s3) / (n * s4 - s2 ** 2)
b = (s3 - k * s2) / n
# 打印斜率和截距
print("斜率: {:.2f}, 截距: {:.2f}".format(k, b))
# 绘制数据点
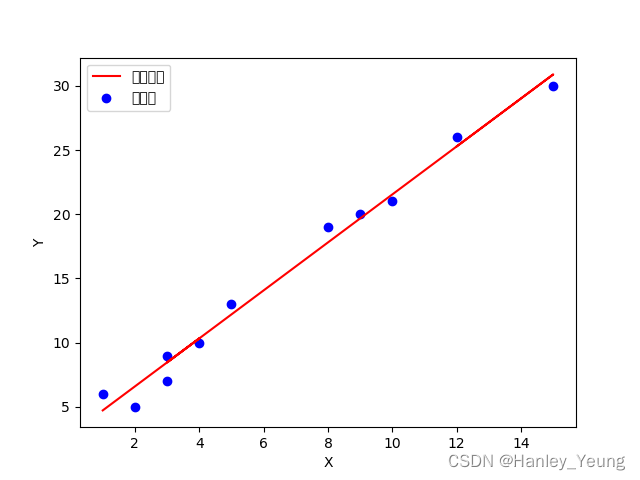
plt.scatter(X, Y, color='blue', label='数据点')
# 计算拟合直线的Y值
Y_pred = k * X + b
# 绘制拟合直线
plt.plot(X, Y_pred, color='red', label='拟合直线')
# 设置图例
plt.legend()
# 设置坐标轴标签
plt.xlabel('X')
plt.ylabel('Y')
# 显示图表
plt.show()
RANSAC在最小二乘法上的应用代码
import numpy as np
import scipy as sp
import scipy.linalg as sl
def ransac(data, model, n, k, t, d, debug=False, return_all=False):
"""
输入:
data - 样本点
model - 假设模型:事先自己确定
n - 生成模型所需的最少样本点
k - 最大迭代次数
t - 阈值:作为判断点满足模型的条件
d - 拟合较好时,需要的样本点最少的个数,当做阈值看待
输出:
bestfit - 最优拟合解(返回nil,如果未找到)
"""
iterations = 0
bestfit = None
besterr = np.inf # 设置默认值
best_inlier_idxs = None
while iterations < k:
maybe_idxs, test_idxs = random_partition(n, data.shape[0])
print('test_idxs = ', test_idxs)
maybe_inliers = data[maybe_idxs, :] # 获取size(maybe_idxs)行数据(Xi,Yi)
test_points = data[test_idxs] # 若干行(Xi,Yi)数据点
maybemodel = model.fit(maybe_inliers) # 拟合模型
test_err = model.get_error(test_points, maybemodel) # 计算误差:平方和最小
print('test_err = ', test_err < t)
also_idxs = test_idxs[test_err < t]
print('also_idxs = ', also_idxs)
also_inliers = data[also_idxs, :]
if debug:
print('test_err.min()', test_err.min())
print('test_err.max()', test_err.max())
print('numpy.mean(test_err)', np.mean(test_err))
print('iteration %d:len(alsoinliers) = %d' % (iterations, len(also_inliers)))
# if len(also_inliers > d):
print('d = ', d)
if (len(also_inliers) > d):
betterdata = np.concatenate((maybe_inliers, also_inliers)) # 样本连接
bettermodel = model.fit(betterdata)
better_errs = model.get_error(betterdata, bettermodel)
thiserr = np.mean(better_errs) # 平均误差作为新的误差
if thiserr < besterr:
bestfit = bettermodel
besterr = thiserr
best_inlier_idxs = np.concatenate((maybe_idxs, also_idxs)) # 更新局内点,将新点加入
iterations += 1
if bestfit is None:
raise ValueError("did't meet fit acceptance criteria")
if return_all:
return bestfit, {'inliers': best_inlier_idxs}
else:
return bestfit
def random_partition(n, n_data):
"""return n random rows of data and the other len(data) - n rows"""
all_idxs = np.arange(n_data) # 获取n_data下标索引
np.random.shuffle(all_idxs) # 打乱下标索引
idxs1 = all_idxs[:n]
idxs2 = all_idxs[n:]
return idxs1, idxs2
class LinearLeastSquareModel:
# 最小二乘求线性解,用于RANSAC的输入模型
def __init__(self, input_columns, output_columns, debug=False):
self.input_columns = input_columns
self.output_columns = output_columns
self.debug = debug
def fit(self, data):
# np.vstack按垂直方向(行顺序)堆叠数组构成一个新的数组
A = np.vstack([data[:, i] for i in self.input_columns]).T # 第一列Xi-->行Xi
B = np.vstack([data[:, i] for i in self.output_columns]).T # 第二列Yi-->行Yi
x, resids, rank, s = sl.lstsq(A, B) # residues:残差和
return x # 返回最小平方和向量
def get_error(self, data, model):
A = np.vstack([data[:, i] for i in self.input_columns]).T # 第一列Xi-->行Xi
B = np.vstack([data[:, i] for i in self.output_columns]).T # 第二列Yi-->行Yi
B_fit = sp.dot(A, model) # 计算的y值,B_fit = model.k*A + model.b
err_per_point = np.sum((B - B_fit) ** 2, axis=1) # sum squared error per row
return err_per_point
def test():
# 生成理想数据
n_samples = 500 # 样本个数
n_inputs = 1 # 输入变量个数
n_outputs = 1 # 输出变量个数
A_exact = 20 * np.random.random((n_samples, n_inputs)) # 随机生成0-20之间的500个数据:行向量
perfect_fit = 60 * np.random.normal(size=(n_inputs, n_outputs)) # 随机线性度,即随机生成一个斜率
B_exact = sp.dot(A_exact, perfect_fit) # y = x * k
# 加入高斯噪声,最小二乘能很好的处理
A_noisy = A_exact + np.random.normal(size=A_exact.shape) # 500 * 1行向量,代表Xi
B_noisy = B_exact + np.random.normal(size=B_exact.shape) # 500 * 1行向量,代表Yi
if 1:
# 添加"局外点"
n_outliers = 80
all_idxs = np.arange(A_noisy.shape[0]) # 获取索引0-499
np.random.shuffle(all_idxs) # 将all_idxs打乱
outlier_idxs = all_idxs[:n_outliers] # 80个0-500的随机局外点
A_noisy[outlier_idxs] = 20 * np.random.random((n_outliers, n_inputs)) # 加入噪声和局外点的Xi
B_noisy[outlier_idxs] = 50 * np.random.normal(size=(n_outliers, n_outputs)) # 加入噪声和局外点的Yi
# setup model
all_data = np.hstack((A_noisy, B_noisy)) # 形式([Xi,Yi]....) shape:(500,2)500行2列
input_columns = range(n_inputs) # 数组的第一列x:0
output_columns = [n_inputs + i for i in range(n_outputs)] # 数组最后一列y:1
debug = False
model = LinearLeastSquareModel(input_columns, output_columns, debug=debug) # 类的实例化:用最小二乘生成已知模型
linear_fit, resids, rank, s = sp.linalg.lstsq(all_data[:, input_columns], all_data[:, output_columns])
# run RANSAC 算法
ransac_fit, ransac_data = ransac(all_data, model, 50, 1000, 7e3, 300, debug=debug, return_all=True)
if 1:
import pylab
sort_idxs = np.argsort(A_exact[:, 0])
A_col0_sorted = A_exact[sort_idxs] # 秩为2的数组
if 1:
pylab.plot(A_noisy[:, 0], B_noisy[:, 0], 'b.', label='data') # 散点图使用绿色点表示
pylab.plot(A_noisy[ransac_data['inliers'], 0], B_noisy[ransac_data['inliers'], 0], 'kx', label="RANSAC data")
else:
pylab.plot(A_noisy[non_outlier_idxs, 0], B_noisy[non_outlier_idxs, 0], 'b.', label='noisy data')
pylab.plot(A_noisy[outlier_idxs, 0], B_noisy[outlier_idxs, 0], 'r.', label='outlier data')
pylab.plot(A_col0_sorted[:, 0],
np.dot(A_col0_sorted, ransac_fit)[:, 0],
label='RANSAC fit')
pylab.plot(A_col0_sorted[:, 0],
np.dot(A_col0_sorted, perfect_fit)[:, 0],
label='exact system')
pylab.plot(A_col0_sorted[:, 0],
np.dot(A_col0_sorted, linear_fit)[:, 0],
label='linear fit')
pylab.legend()
pylab.show()
if __name__ == "__main__":
test()
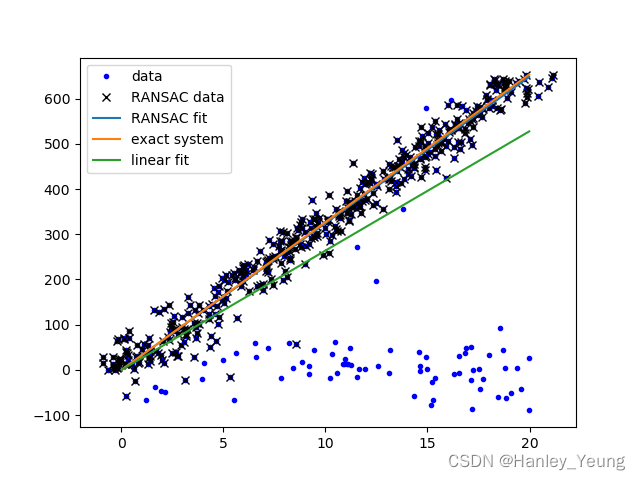
- 绿色直线表示直接使用最小二乘法时的回归方程
- 橙色直线表示没有噪音时的回归方程
- 蓝色直线(几乎与橙色重合)表示在RANSAC框架下使用的最小二乘法得到的回归方程
















 177
177

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











