







SCT2A25采用带集成环路补偿的恒导通时间(COT)模式控制,大大简化了转换器的片外配置。SCT2A25具有典型的140uA低静态电流,采用脉冲频率调制(PFM)模式,它使转换器在轻载或空载条件下实现高转换效率。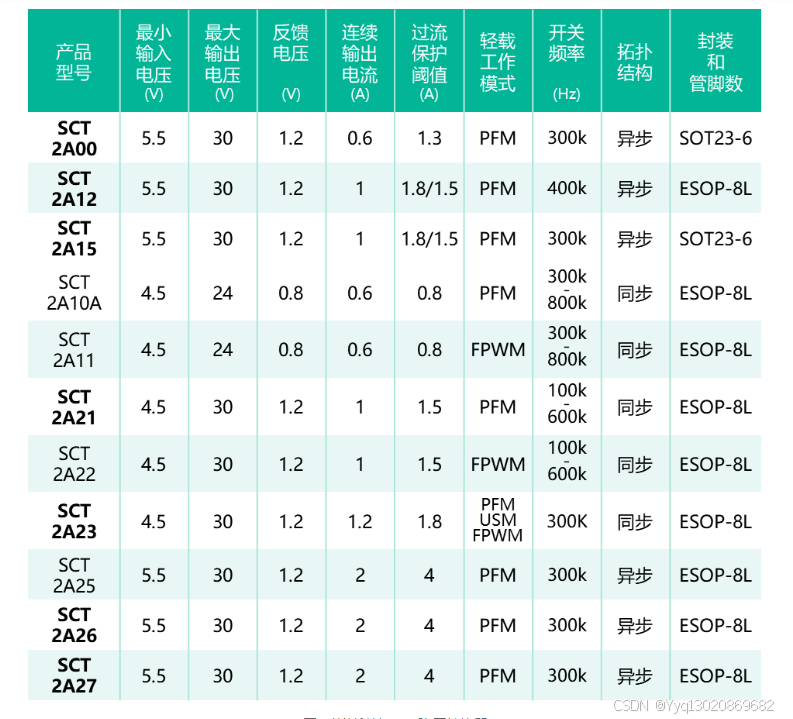
芯洲科技100V降压芯片系列提供丰富的48V系统解决方案,十余款成熟料号供您选择。
小身材大作用,极致的性价比之选
—— SCT2A00 | 01
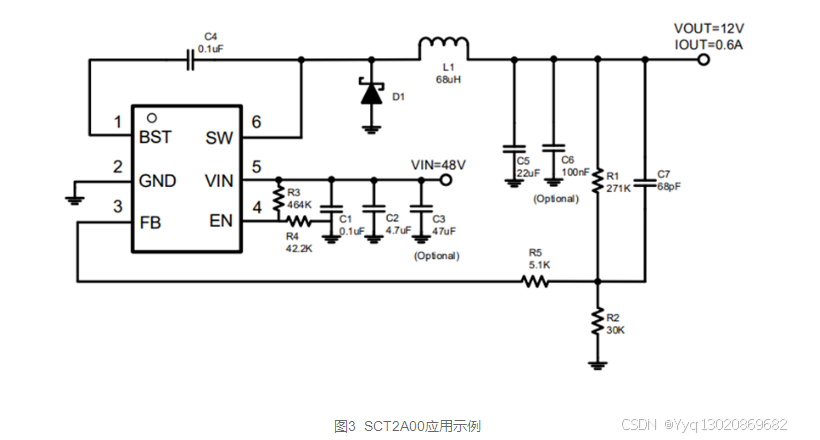
SOT23-6封装,工作频率300KHz,持续输出电流0.6A,峰值限制电流1.3A,完美支持了高电压小电流的应用场景(如BMS、两轮车电控系统)。
拥有极低的49uA静态电流,空载电流仅有60uA,10mA负载时高达85%以上的效率,使其有效减小待机消耗。芯片内部集成纹波注入电路,采用COT控制模式,外围器件简单,结合小封装使得布板面积进一步优化。
管脚布局兼容市面上主流产品,过流保护、输出过压保护、过温保护、可编制的欠压锁定等应有尽有,为芯片安全保驾护航。
若有更大一点输出电流的需求,芯洲科技100V系列之SCT2A12,采用ESOP-8L封装增强散热能力,持续输出电流1A。使用更安全的过流保护方式,在输出电压小于60V时峰值限制电流为1.8A,输出电压大于60V时降低到1.5A,保证芯片在高压时的可靠性。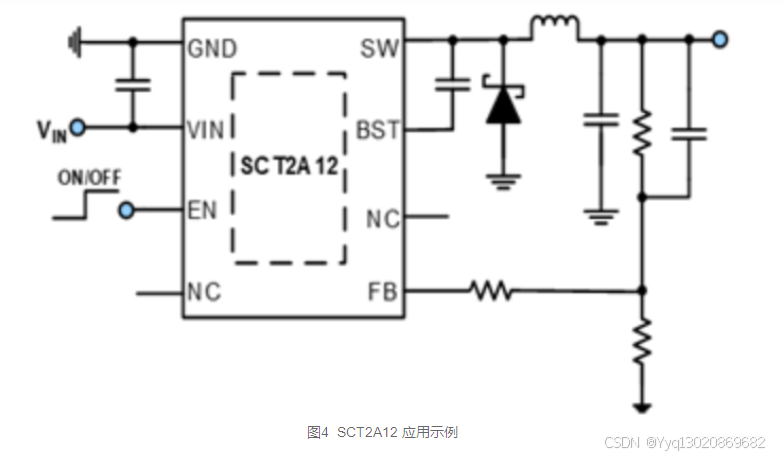
不畏电路启动瞬间,4A峰值电流很顶用!
—— SCT2A25/6 | 02
在一些场景(如GPS Tracker)中,后级电路在启动瞬间可能会产生一个较大的电流,这要求芯片有较强的电流输出能力,且不会发生损坏。SCT2A25/6能有效应对此场景,4A的峰值输出电流,能够提供后级电路在启动瞬间的大电流需求,不会由于启动瞬间的大电流导致输出电压异常;持续输出电流2A同样能满足较大输出电流的需求。
芯片设定工作频率300KHz,采用COT控制模式简化环路,ESOP-8封装满足了大电流下的散热需求,2A负载下芯片温度仅有80℃(Vin=48V,Vout=12V)。
SCT2A25管脚兼容市场主流产品,SCT2A26在功能不变的基础上优化了管脚布局,使布板更加方便。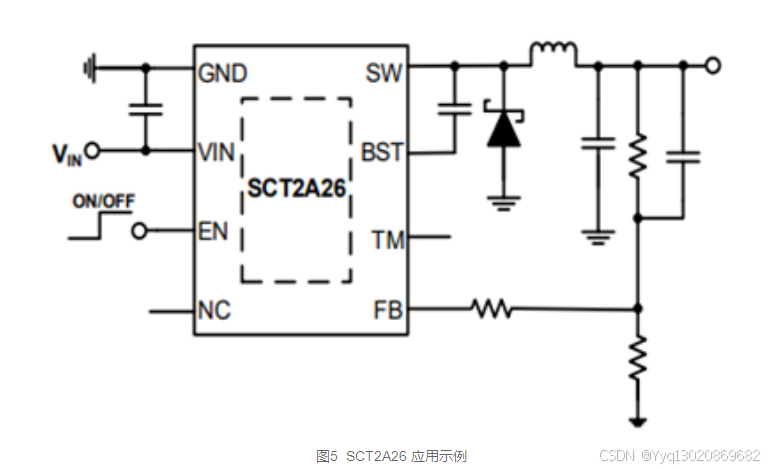
布板面积太紧张?集成LDO加量不加价
—— SCT2A27 | 03
大部分应用中,通过一级Buck将较高电压转换到低压后,往往需要再通过二级Buck/LDO转换获得更稳定的低压供电系统。尽管LDO面积很小,但也不可避免的增加了布板面积和采购成本。
SCT2A27在持续输出2A、峰值电流4A、封装保持ESOP-8不变的高性能Buck基础上,集成了输出电压可配置为5V或3.3V、输出电流能力200mA的一路LDO。芯片的VBIAS引脚作为集成LDO输入端的同时,也能有效降低buck的静态电流、提高其轻载工作时的效率;在一定配置下,LDO也可以独立于buck工作。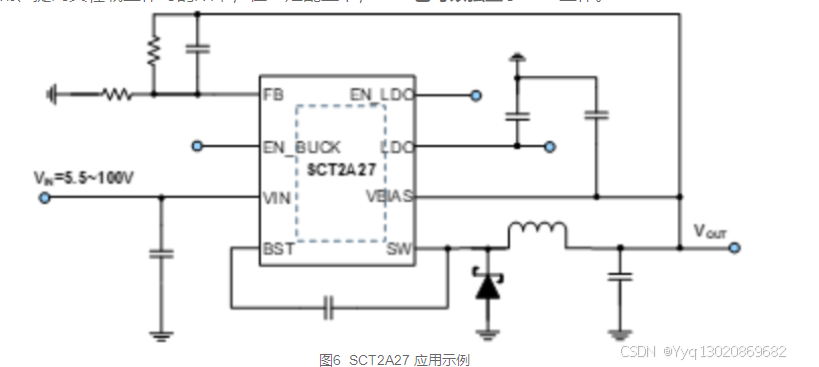
多种工作模式/频率,支持Isolation Buck
——SCT2A22/3 | 04
同步的Buck在轻载时一般会采取三种工作模式:FPWM——强制连续导通,使得开关频率不变,此时电感电流会出现负值;PFM——降低工作频率,提高轻载效率;USM——保持频率不会降低到20KHz以下,避免进入人耳频率范围听到噪音。
每个模式各有利弊,PFM模式效率高但是输出电压纹波相对较大;USM模式不会产生噪音但在极轻负载时效率不如PFM模式;FPWM模式的轻载效率很低,但是输出电压纹波很小同时可以支持Isolation buck应用。
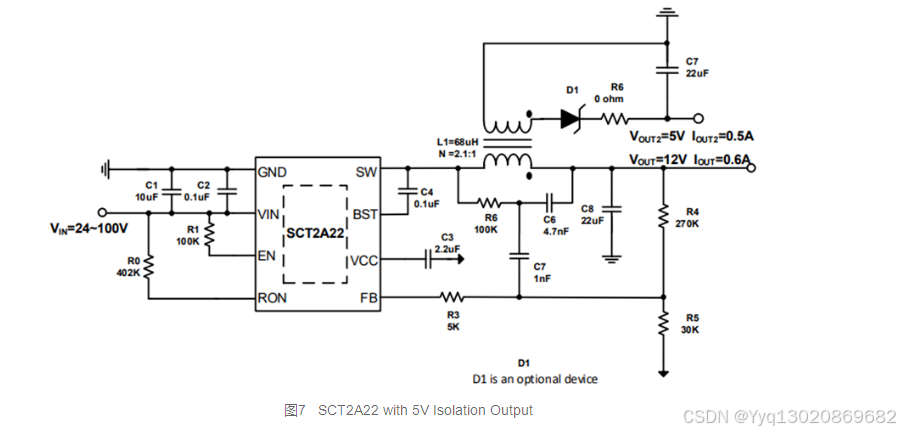
SCT2A22是一款支持Isolation buck的100V芯片,采用FPWM工作模式、输出电流1A、可自主设置到最高工作频率600KHz。通过变压器可设置一路Buck和一路Isolation Buck 共两路输出,有效节省器件成本。
SCT2A23输出电流1.2A,固定工作频率300KHz,内部集成纹波注入电路简化了外围器件,可通过设置MODE引脚的状态从而选择三种轻载工作模式FPWM/ PFM/USM,以便灵活配置不同应用下的需求。
当设置为PFM/USM模式时,可以采取将输出端经过二极管接到VCC引脚的方式,降低芯片内部功耗,进一步提高轻载效率,实测1mA时的效率可以再提高10%+。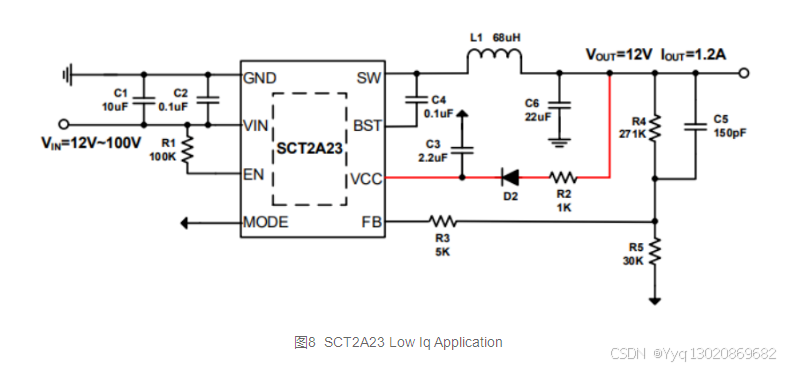 当将VCC引脚连接到MODE引脚时,便可将芯片设置为FPWM模式,该模式下可以支持Isolation buck应用。
当将VCC引脚连接到MODE引脚时,便可将芯片设置为FPWM模式,该模式下可以支持Isolation buck应用。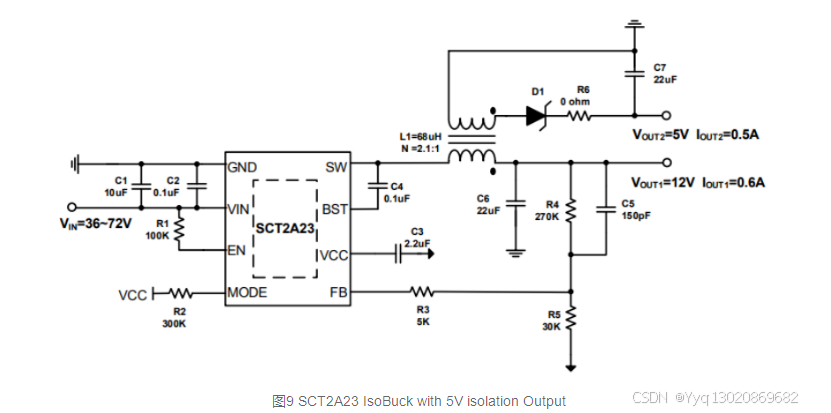

















 1621
1621

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









