







一 特征分解
线性代数中有个定理:实对称矩阵A(A=AT)一定可以相似对角化于对角矩阵Σ,且一定存在一个正交矩阵Q,通过对A进行正交变换使得其变换为对角阵,即下述公式成立:

上述公式中,Q的列向量是矩阵A的特征向量,λ是矩阵A的特征值。将矩阵A分解为特征向量矩阵Q(也是正交矩阵)和特征值矩阵Σ的过程叫作特征分解。很显然,这样的分解是具有局限性的:
- 分解的对象必须是方阵
- 分解的对象必须是对称的
那么,如果给出的矩阵A是m*n阶的一般矩阵,是否能对其进行特征分解?
答案是可以的,奇异值分解SVD就是实现一般矩阵的分解的。
二 奇异值分解(SVD)
1.SVD概述
SVD提供两组基向量(左奇异向量和右奇异向量)对数据矩阵A作行放缩和列放缩,非常适用于没有均值中心化(各数减去所在列的平均值)的稀疏数据(稀疏矩阵)。SVD方便地提供了矩阵分解和基表示以及基的重要程度(奇异值越大,越重要),被誉为“线性代数的绝对亮点”。SVD定义:对于一个m*n阶实数矩阵A,可以将其分解为如下形式:

上述公式中,U是一个m×m的正交矩阵(UUT =E),其正交列称为左奇异向量;V是一个n×n的正交矩阵(VVT =E),其正交列称为右奇异向量;Σ是一个包含奇异值的m*n的对角矩阵(注意,Σ不一定是方阵。长方形的矩阵只要其只有Σii元素是非0的,也称为对角阵)。
2.SVD性质
-
U中的列(左奇异向量)是AAT 的正交特征向量。因为:L=AAT =UΣ(VT V)ΣTUT =UΣΣTUT
-
V中的列(右奇异向量)是AT A的正交特征向量。因为:R=AT A=VΣT(UTU)ΣVT = VΣT ΣVT
-
ΣΣT 和ΣT Σ虽是不同的对角阵( ΣΣT是m×m阶的,ΣTΣ是 n×n阶的),但其主对角元素都是奇异值的平方。如下图所示:
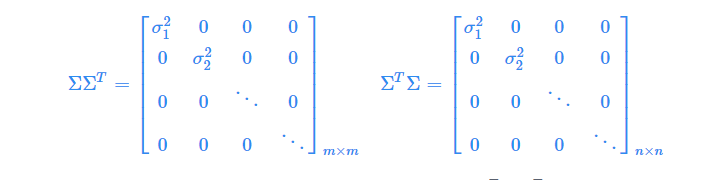
-
一般性地,将Σ的奇异值按递减排列,U和V与之对应
-
SVD可以消除噪声: 在实际应用中,只有前K(k<<n)个奇异值相对较大,其余的都非常小可以忽略。那么,我们选择U的前k列,VT 的前k行,还有Σ前K个奇异值。产生原始数据A的近似矩阵:A≈Uk·Σk·VkT 。
-
SVD可以用来数据降维:Vk中的列(前k个右奇异向量)可以表示为数据集进行列规约的k维基座标,即A’=A·Vk=Uk·Σk。Uk中的列(前k个左奇异向量)可以表示为数据集进行行规约的k维基座标,即(AT )’=AT ·Uk=Vk·Σk。
3.SVD计算实例
给出一个数学题计算的实例:

三 SVD实现
1.算法描述
该算法是从纯数学计算的角度去实现SVD的,算法过程如下:
- 输入m×n矩阵A
- 计算L=AAT 并进行特征分解,得左奇异矩阵U 和对角矩阵Λ=ΣΣT
- Λ对角元素开根号得奇异值,生成m×n奇异值矩阵S
- 计算R=AT A并进行特征分解,得右奇异矩阵V
- U,S,V均按照奇异值降序排列
- 找到前k个最大值
- 计算近似矩阵A1=Uk·Sk·VkT
- 输出A1,U,S,V
显然这个算法的时间复杂度为特征分解的时间复杂度O(n3)。当然还有效率更高的算法,有兴趣者可以自行补充,本人不会。
2.python实现
看代码:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 1247
1247











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









