 STM32编码器控制详解
STM32编码器控制详解





一、编码器
1.概述
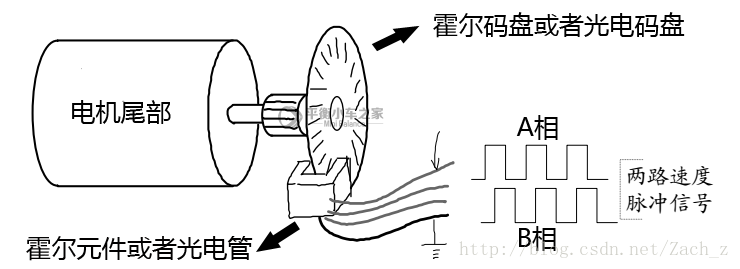
编码器是一种将角位移或者角速度转换成一连串电数字脉冲的旋转式传感器。
可以用来测量位置,测量速度。
2.原理
3. 编码器软件四倍频技术
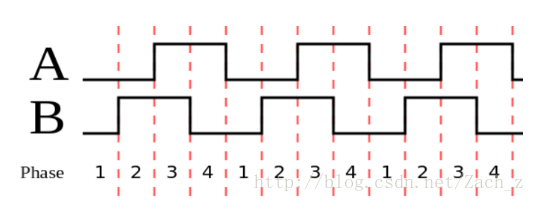
四倍频的方法是测量A相和B相的上升沿和下降沿
二、stm32控制编码器
stm32控制编码器可以采用Timer的编码器模式,Tim1~8的CH1和CH2分别对应A相和B相
1.TIMx的编码器接口模式
选择编码器接口模式的方法是:如果计数器只在TI2的边沿计数,则置TIMx_SMCR寄存器中的
SMS=001;如果只在TI1边沿计数,则置SMS=010;如果计数器同时在TI1和TI2边沿计数,则
置SMS=011。
通过设置TIMx_CCER寄存器中的CC1P和CC2P位,可以选择TI1和TI2极性;如果需要,还可以
对输入滤波器编程。
两个输入TI1和TI2被用来作为增量编码器的接口。假定计数器已经启动(TIMx_CR1
寄存器中的CEN=’1’),计数器由每次在TI1FP1或TI2FP2上的有效跳变驱动。
配置范例:
CC1S=’01’ (TIMx_CCMR1寄存器, IC1FP1映射到TI1)
CC2S=’01’ (TIMx_CCMR2寄存器, IC2FP2映射到TI2)
CC1P=’0’ (TIMx_CCER寄存器, IC1FP1不反相, IC1FP1=TI1)
CC2P=’0’ (TIMx_CCER寄存器, IC2FP2不反相, IC2FP2=TI2)
SMS=’011’ (TIMx_SMCR寄存器,所有的输入均在上升沿和下降沿有效).
CEN=’1’ (TIMx_CR1寄存器,计数器使能)
2.硬件连接
实验采用一款安装了编码盘的直流电机,如图:
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1298
1298

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









