







GNNS概述
GNSS即全球导航卫星系统(global navigation satellite system),它包括全球性的美国的GPS、中国的北斗、俄罗斯的GLONASS以及欧盟的Galileo。此外还有区域性导航系统,如日本的准天顶(QZSS),印度的IRNSS。增强系统有美国的WAAS,日本的MSAS、欧盟的EGNOS、印度的GAGAN以及尼日尼亚的NIG-GOMSAT-1等.
卫星导航系统的组成包括三个部分:空间星座部分、地面监控部分和用户设备部分。空间星座部分就是那些卫星啦,四大导航系统的卫星占据着不同的轨道,卫星的数量、组成、通信等原理也不尽相同。地面监控中心接收、测量将卫星信号,确定卫星的轨道信息 并将其发射给卫星。用户设备即接收机,可以是专业的多频多系统接收机,也可以是我们手机中的GPS模块,通过信号解算出的卫星轨道信息等来确定用户的位置。
INS概述
惯性导航系统INS(Inertial Navigation System)是完整的三维航位推定位航器件,包括一组惯性测量单元IMU和数学分析处理器。
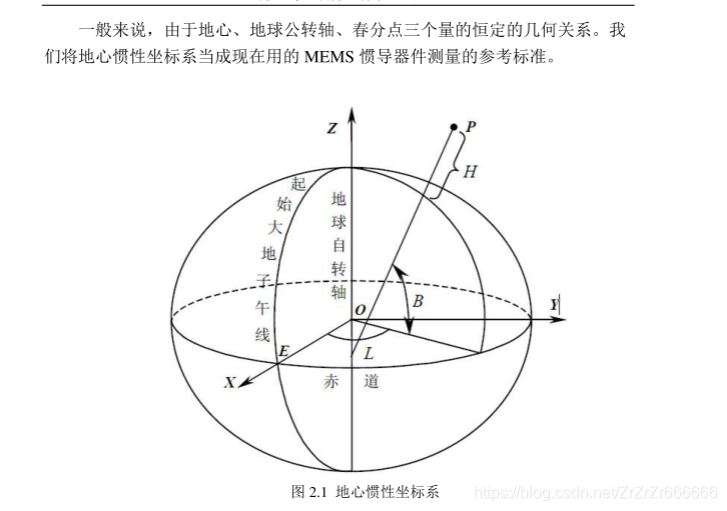
INS导航系统以地心惯性坐标系为参考,如图:
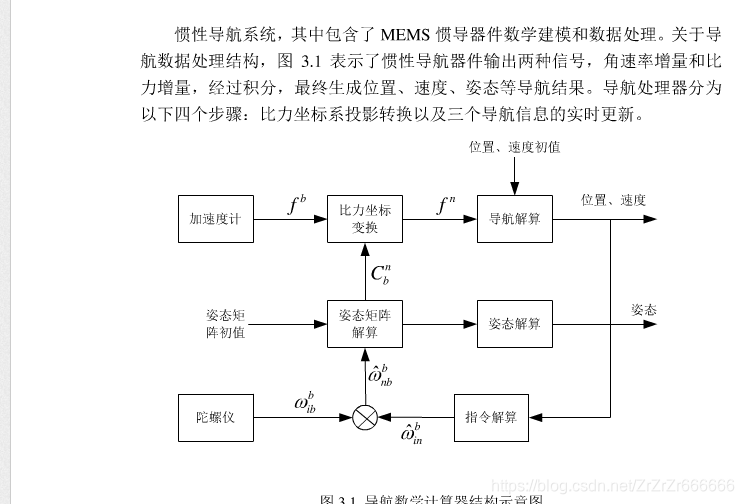
 INS数据采集和输出
INS数据采集和输出
GNS/INS组合方式
GNSS/INS组合算法模型也是基于导航坐标系,位置参数为大地坐标系(经度,纬度,大地高)。
LIDAR
激光雷达最早的定义是 LIDAR,英文为 Light Deteation and Ranging,中文意思是「光的探测和测距」。
其实更准确的一个定义是 LADAR:LAser Detection and Ranging,即「激光的探测和测距」。这是在 2004 年提出的定义,更符合激光雷达的概念.
激光雷达实际上是一种工作在光学波段(特殊波段)的雷达,它的优点非常明显:
1、具有极高的分辨率:激光雷达工作于光学波段,频率比微波高2~3个数量级以上,因此,与微波雷达相比,激光雷达具有极高的距离分辨率、角分辨率和速度分辨率;
2、抗干扰能力强:激光波长短,可发射发散角非常小(μrad量级)的激光束,多路径效应小(不会形成定向发射,与微波或者毫米波产生多路径效应),可探测低空/超低空目标;
3、获取的信息量丰富:可直接获取目标的距离、角度、反射强度、速度等信息,生成目标多维度图像;
4、可全天时工作:激光主动探测,不依赖于外界光照条件或目标本身的辐射特性。它只需发射自己的激光束,通过探测发射激光束的回波信号来获取目标信息。
但是激光雷达最大的缺点——容易受到大气条件以及工作环境的烟尘的影响,要实现全天候的工作环境是非常困难的事情。
Lidar数据坐标是由IMU和GPS在WGS-84坐标框架下得到的WGS-84坐标,我国空间信息数据通常用国家2000,所以需要将WGS-84坐标转换为工程需要的坐标。
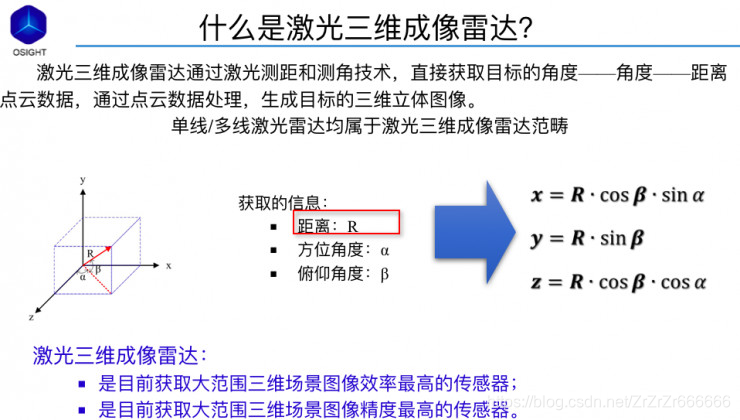
激光三维成像雷达数据信息如图:
无人驾驶应用(点云数据处理)
INS惯性坐标导航,数据分析,详细请见该链接http://xchu.net/2020/01/10/37gnss-localizer/
激光雷达篇,请详细见该链接http://xchu.net/2020/03/11/44roadinfo-extraction/#more



















 5726
5726

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











