







1.定时器
在我们使用的单片机中分类:
系统定时器–属于内核,功能比较简单,主要就是用于做一些简单的延时(ms us ),时间片。
ST公司集成的定时器:
基本定时器:(中文参考手册15章节)tim6和tim7,功能是和系统定时器一样的
通用定时器:(中文参考手册14章节)TIM2、TIM3、TIM4和TIM5,集成了基本定时器的功能,另外还包含了输入捕获和输出比较—重点
高级定时器:(中文参考手册13章节)tim1和tim8,功能复杂,主要用于电机的精密控制
集成了通用定时器的功能,另外死区和刹车的设置。
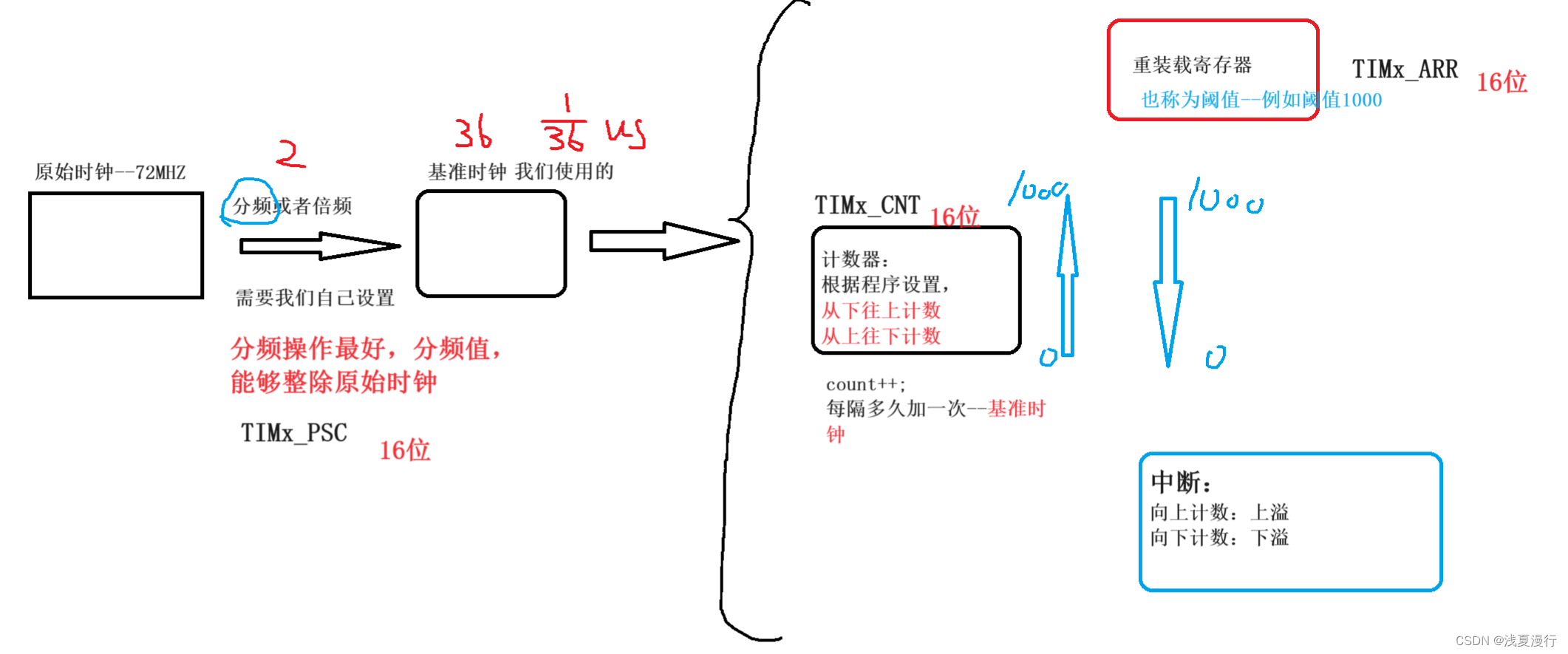
定时器的工作原理
通用定时器的特性
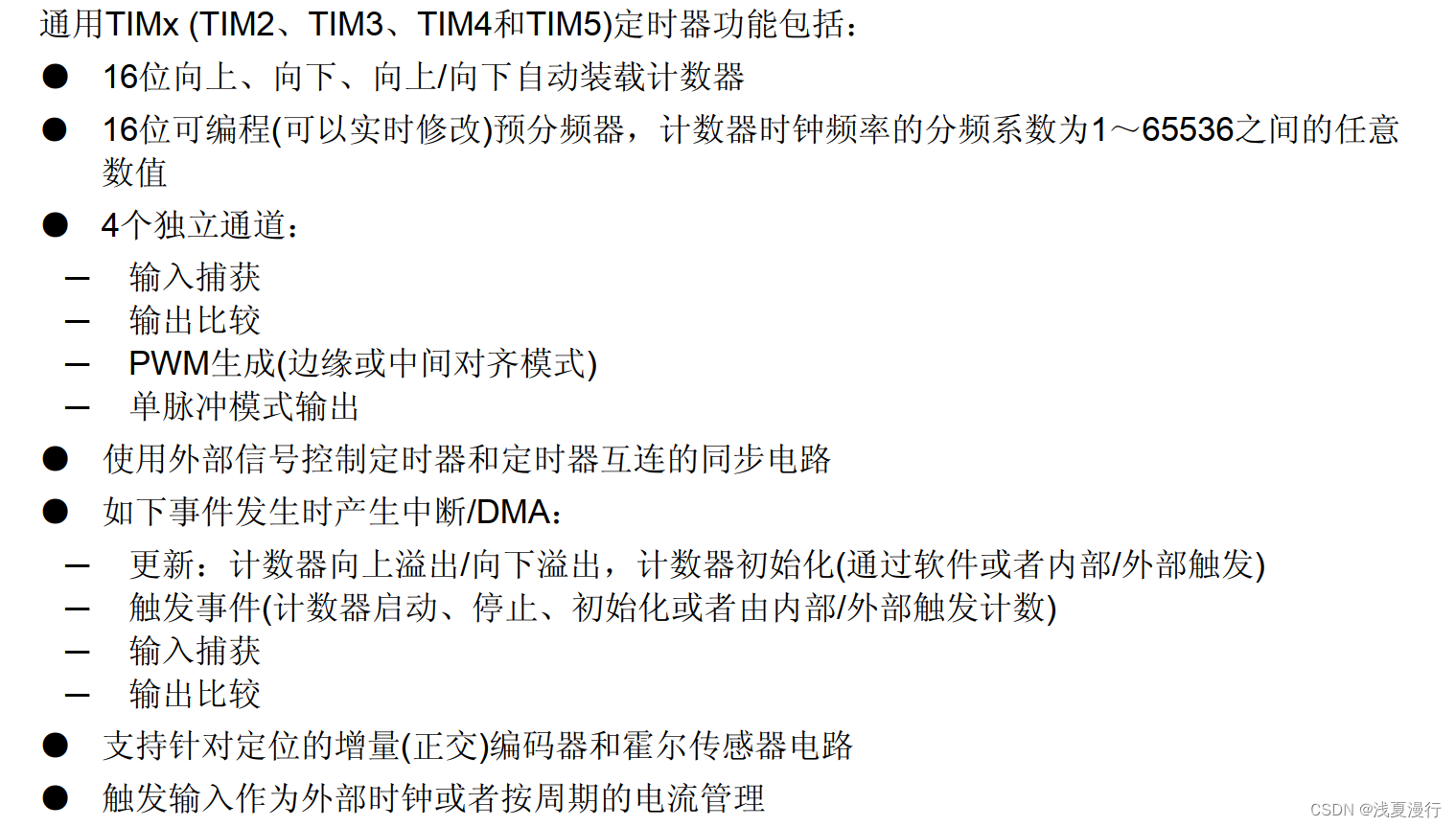
输入捕获:定时器中的输入捕获,主要是捕获外界设备的电平状态的变化,你也可以理解为捕获的就是一些特定的波形。
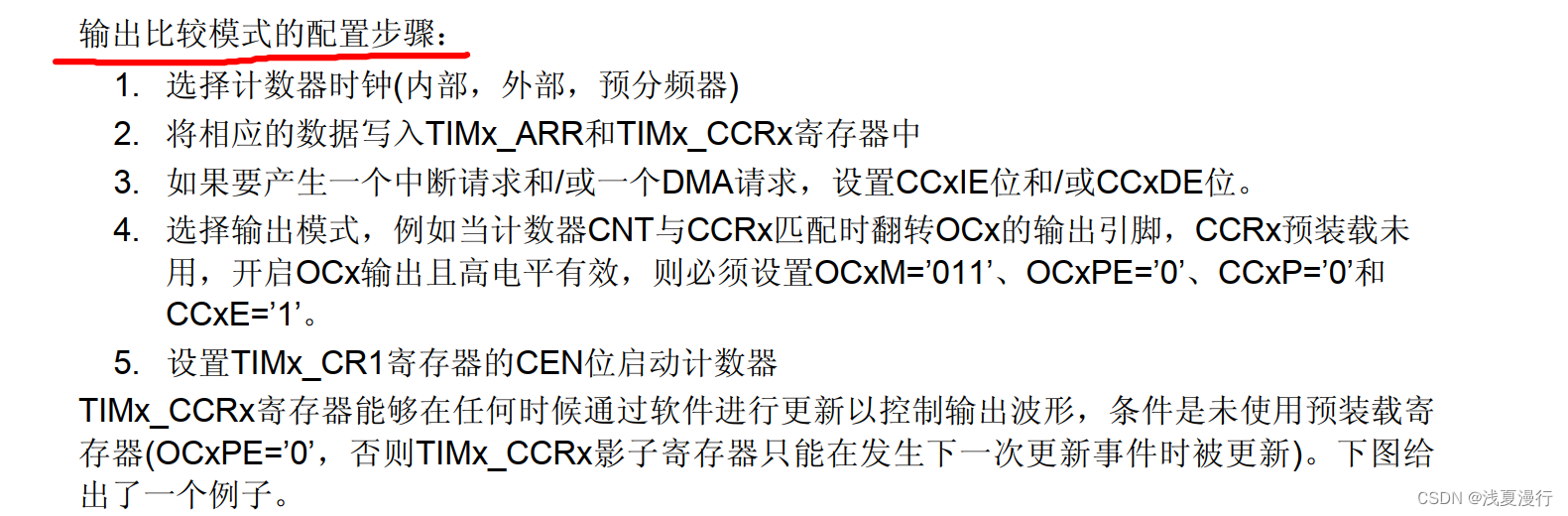
输出比较:通过程序设置输出特定(高电平和低电平时间长度可以调节)的波形,一般需要根据CCR寄存器设置。
pwm波
PWM波:脉冲宽度可调制的波形,
占空比:高电平(有效电平)占整个时钟周期的比例–50% 30%
有效电平:可以是低电平也可以是高电平,这个可以根据实际的需求去设置
在我们的代码中如何区更改占空比???
全部需要依赖于CCR寄存器去更改

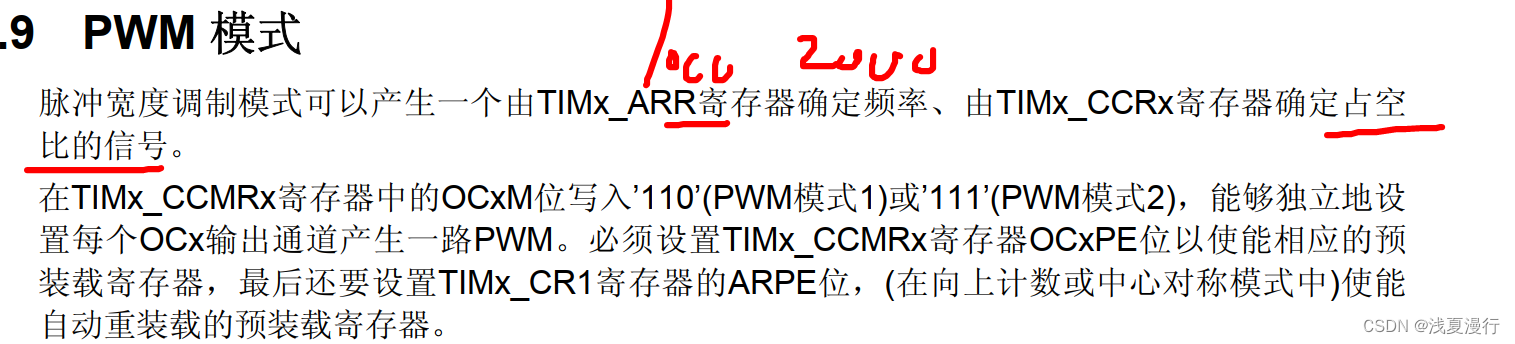
PWM波模式:
PWM波是一种特殊的输出比较,在程序运行中CCR寄存器也就是我们所说的占空比是可以动态调节的,
计数方式:
TIMx_CR1寄存器中的DIR位设置计数方式
向上计数、向下计数


配置步骤:
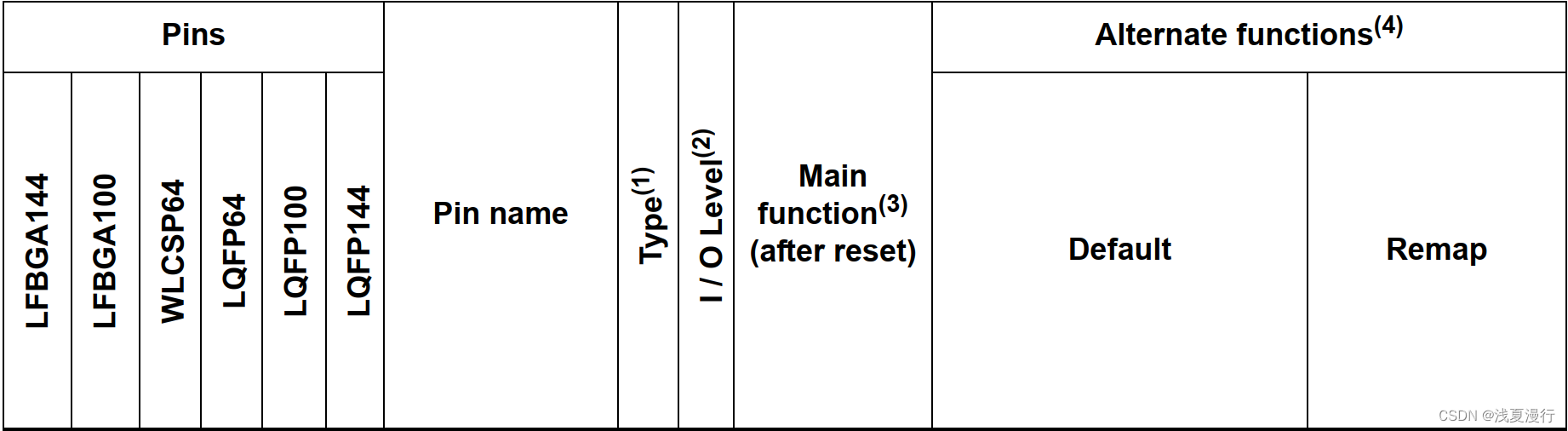
在使用输出比较功能的时候,首先配置定时器的基本功能:时钟 分频 ,重装载,计数方式
将TIM3_CH2映射到PB5的复用功能中
闪烁灯:
#include "tim.h"
void tim_Config(void)
{
GPIO_InitTypeDef gpio_initsources;
TIM_TimeBaseInitTypeDef TIM_BaseSources;
TIM_OCInitTypeDef TIM_OCInitSources;
//打开时钟--PB5 定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
//配置PB5工作模式
gpio_initsources.GPIO_Pin=GPIO_Pin_5;
gpio_initsources.GPIO_Mode=GPIO_Mode_AF_PP;
gpio_initsources.GPIO_Speed=GPIO_Speed_2MHz;
//配置PB5
//void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
GPIO_Init(GPIOB,&gpio_initsources);
//映射
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);
//TIM3_CH2 ---72MHZ 1000ms
//定时器的基本功能
TIM_BaseSources.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_BaseSources.TIM_CounterMode=TIM_CounterMode_Up;//向上计数
TIM_BaseSources.TIM_Period=20000;
TIM_BaseSources.TIM_Prescaler=7200;
TIM_TimeBaseInit(TIM3,&TIM_BaseSources);
//输出比较---PWM模式 输出管脚使能 占空比 有效电平
TIM_OCInitSources.TIM_OCMode=TIM_OCMode_PWM1;//PWM波模式
TIM_OCInitSources.TIM_OutputState=TIM_OutputState_Enable;//使能输出管脚
TIM_OCInitSources.TIM_Pulse=1000;//设置占空比比较数据(CCR)
TIM_OCInitSources.TIM_OCPolarity=TIM_OCPolarity_High;//有效电平--高电平
TIM_OC2Init(TIM3,&TIM_OCInitSources);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3,ENABLE);
//TIM_ITConfig
}
呼吸灯原理:
主要就是通过控制LED闪烁的频率
闪烁灯:
led_on;
delay_ms(1000);
led_off;
delay_ms(1000);
可以通过定时器输出PWM波,改变占空比的大小,来改变波形占空比,间接的达到控制LED的效果;
#include "tim.h"
void tim_Config(void)
{
GPIO_InitTypeDef gpio_initsources;
TIM_TimeBaseInitTypeDef TIM_BaseSources;
TIM_OCInitTypeDef TIM_OCInitSources;
//打开时钟--PB5 定时器3时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
//配置PB5工作模式
gpio_initsources.GPIO_Pin=GPIO_Pin_5;
gpio_initsources.GPIO_Mode=GPIO_Mode_AF_PP;
gpio_initsources.GPIO_Speed=GPIO_Speed_2MHz;
//配置PB5
//void GPIO_Init(GPIO_TypeDef* GPIOx, GPIO_InitTypeDef* GPIO_InitStruct);
GPIO_Init(GPIOB,&gpio_initsources);
//映射
GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3,ENABLE);
//TIM3_CH2 ---72MHZ 1000ms
//定时器的基本功能
TIM_BaseSources.TIM_ClockDivision=TIM_CKD_DIV1;
TIM_BaseSources.TIM_CounterMode=TIM_CounterMode_Up;//向上计数
TIM_BaseSources.TIM_Period=1000;
TIM_BaseSources.TIM_Prescaler=72;
TIM_TimeBaseInit(TIM3,&TIM_BaseSources);
//输出比较---PWM模式 输出管脚使能 占空比 有效电平
TIM_OCInitSources.TIM_OCMode=TIM_OCMode_PWM1;//PWM波模式
TIM_OCInitSources.TIM_OutputState=TIM_OutputState_Enable;//使能输出管脚
TIM_OCInitSources.TIM_Pulse=0;//设置占空比比较数据(CCR)
TIM_OCInitSources.TIM_OCPolarity=TIM_OCPolarity_High;//有效电平--高电平
TIM_OC2Init(TIM3,&TIM_OCInitSources);
TIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable);
TIM_Cmd(TIM3,ENABLE);
//TIM_ITConfig
}
main.c中的内容
delay_ms(1);
if(dir==0) Compare++;
else if(dir==1) Compare--;
if(Compare>=1000)
dir=1;
if(Compare==0)
dir=0;
TIM_SetCompare2(TIM3,Compare);















 990
990











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









