







为什么要使用操作系统
当我们进入嵌入式这个领域的时候, 往往首先接触的都是单片机编程, 单片机编程又首选 51 单片机来入门。 这里面说的单片机编程通常都是指裸机编程,即不加入任何 RTOS(Real Time Operation System 实时操作系统) 的程序。 常用的 RTOS 有国外的 FreeRTOS、μC/OS、 RTX 和国内的 RT-Thread、 Huawei LiteOS 和 AliOS-Things 等, 其中尤以国外开源且免费的 FreeRTOS 的市场占有率最高。
在裸机系统中,所有的程序基本都是自己写的, 所有的操作都是在一个无限的大循环里面实现。现实生活中的很多中小型的电子产品用的都是裸机系统, 而且也能够满足需求。但是为什么还要学习 RTOS 编程,偏偏还要整个操作系统进来。一是项目需要,随着产品要实现的功能越来越多,单纯的裸机系统已经不能够完美地解决问题,反而会使编程变得更加复杂,如果想降低编程的难度, 我们可以考虑引入 RTOS 实现多线程管理, 这是使用RTOS 的最大优势。二是学习的需要,必须学习更高级的东西,实现更好的职业规划,为将来走向人生巅峰迎娶白富美做准备,而不是一味的在裸机编程上面死磕。作为一个合格的嵌入式软件工程师,学习是永远不能停歇的事,时刻都得为将来准备。书到用时方恨少,我希望机会来临时你不要有这种感觉。
RT_thread的移植
准备工作:
1.准备一个工程(LED灯,按键,USART,系统定时器等驱动)
2.准备RT_thread的源码
解压过后的源码:
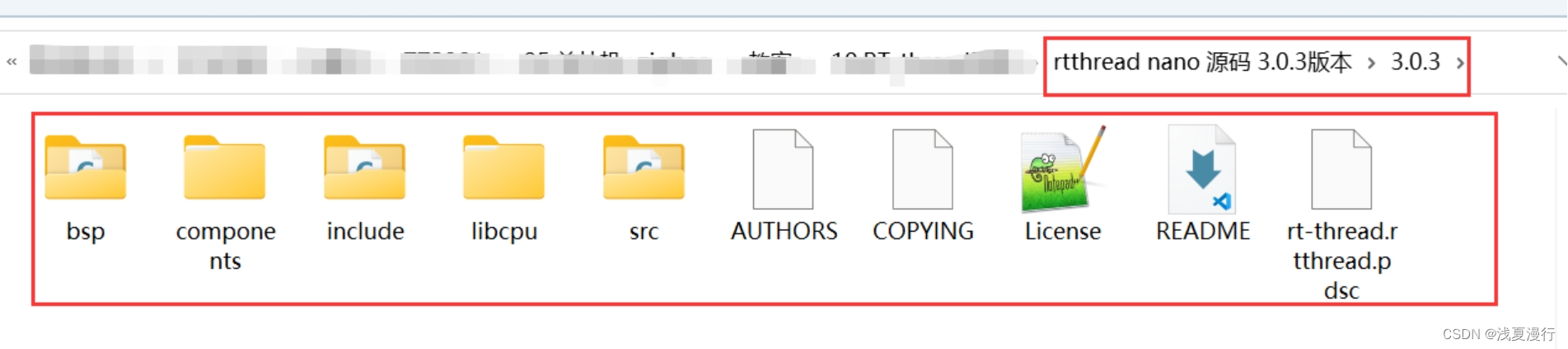
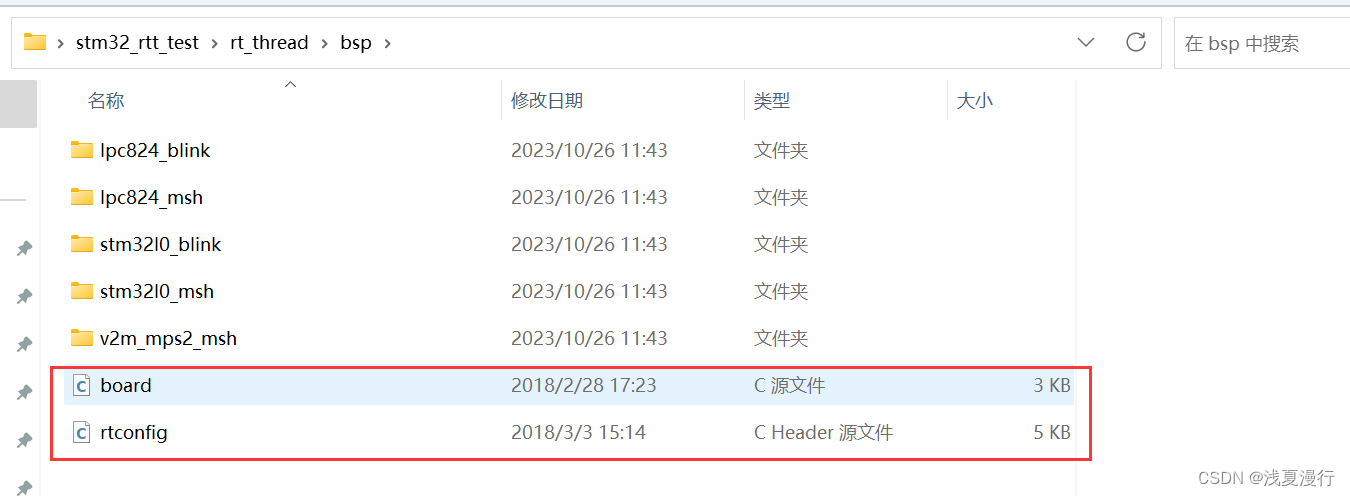
bsp--文件保存的板级支持包,支持不同的芯片
components--包含了一些组件信息 finsh--用于调试打印,在终端上显示调试信息(使用到底层的串口资源)
include--包含的都是头文件
libcpu--和底层硬件相关的库函数
src--内核源码
1.将压缩包中的内容全部复制到工程中

复制到如下位置(以下是自己准备的裸机代码位置):
修改名字3.0.3为rt_thread
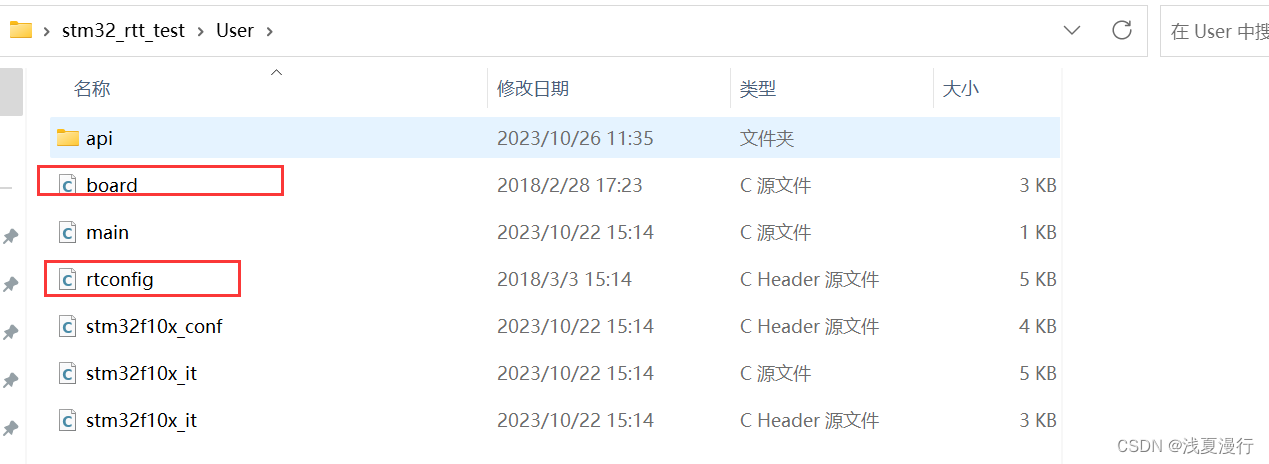
复制如下文件到工程中的user目录中:
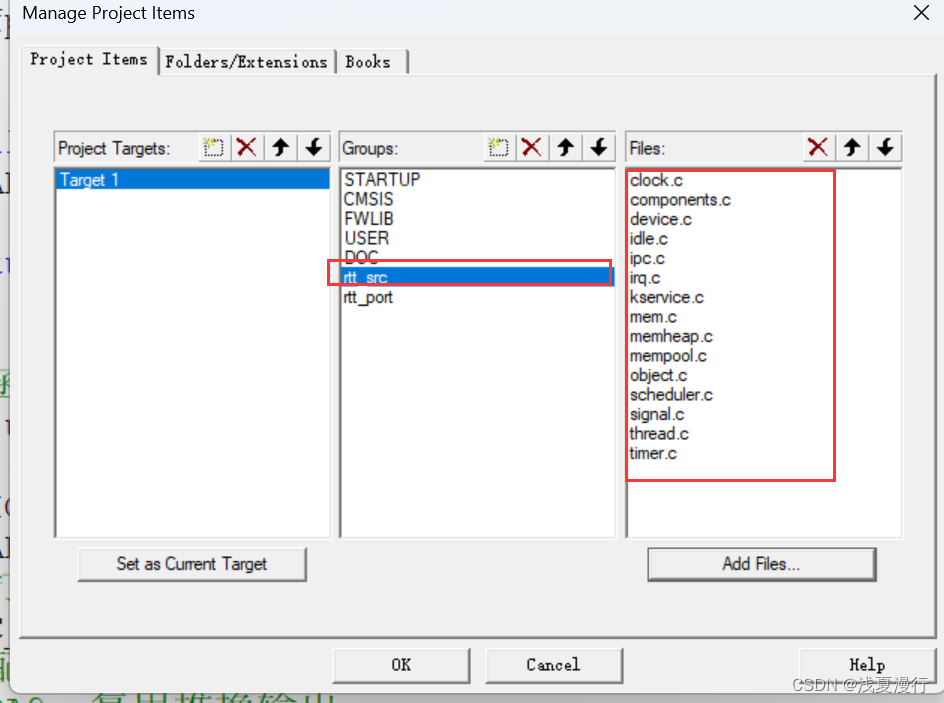
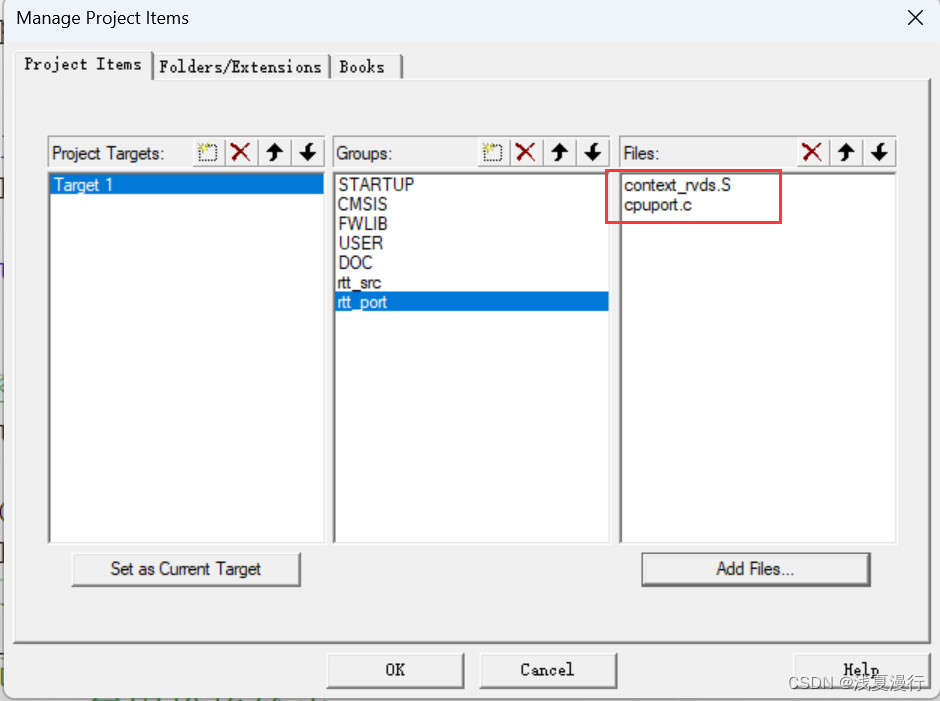
打开工程添加分组:

rtt_src添加的的是系统中SRC文件中的内容:
添加rtt_port分组,:
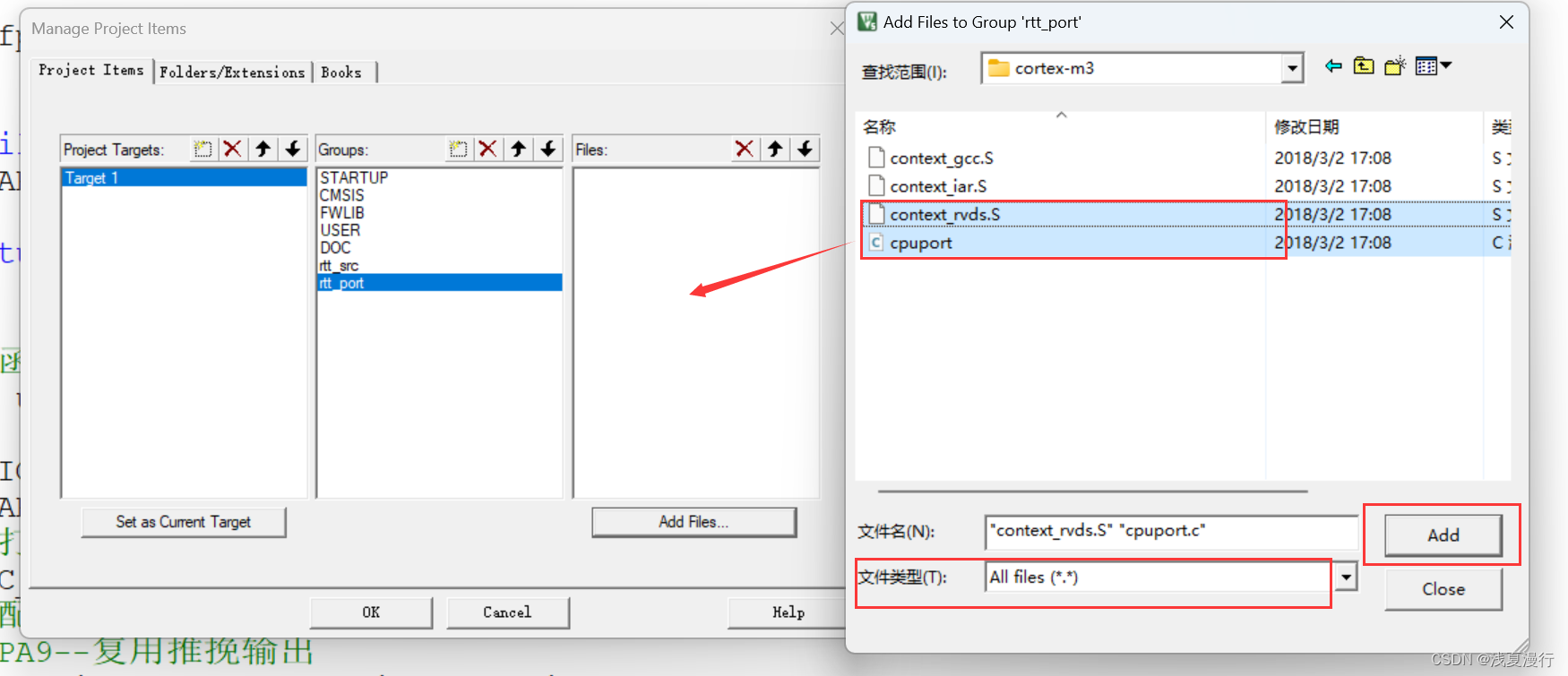
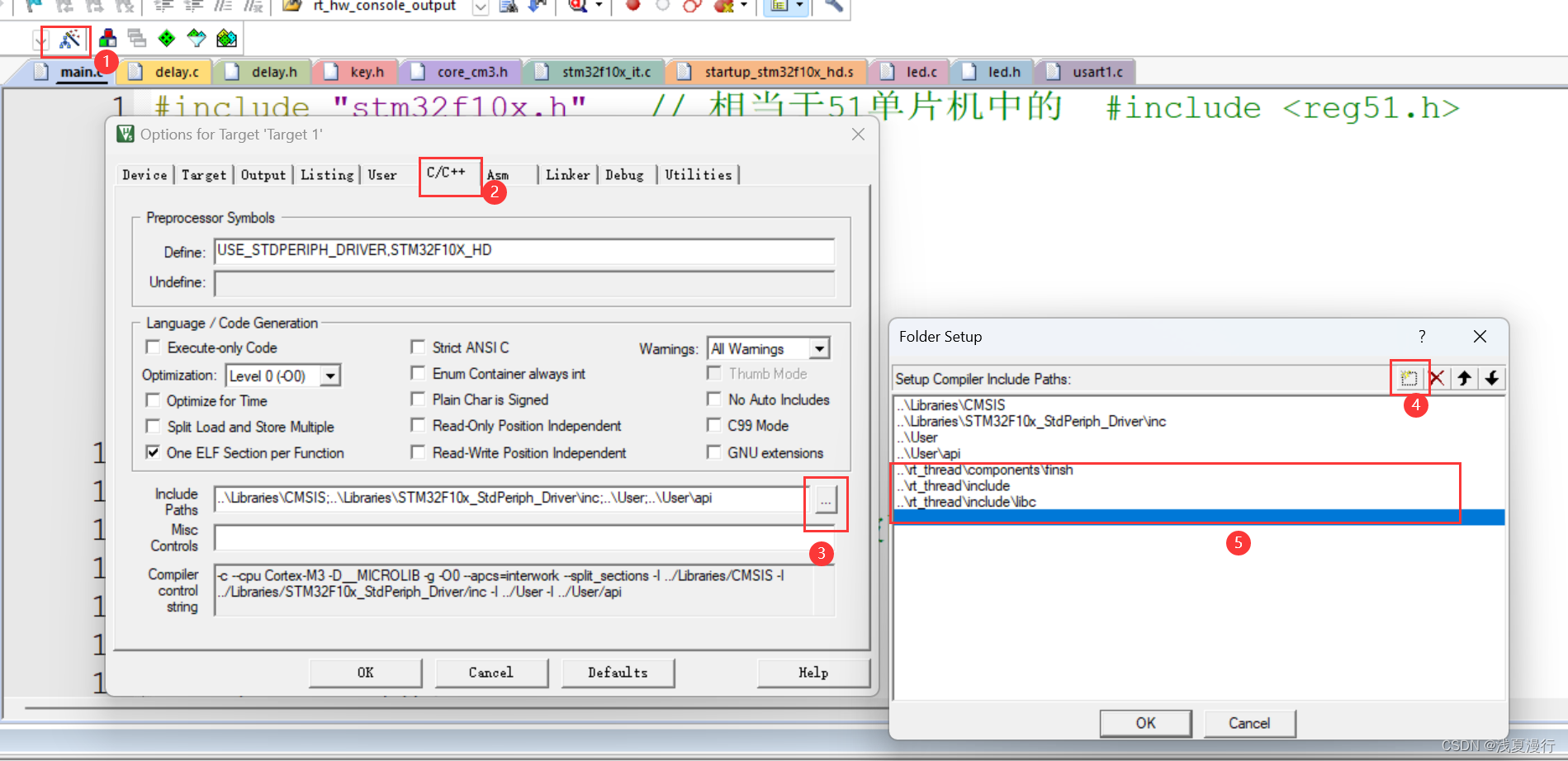
添加头文件:
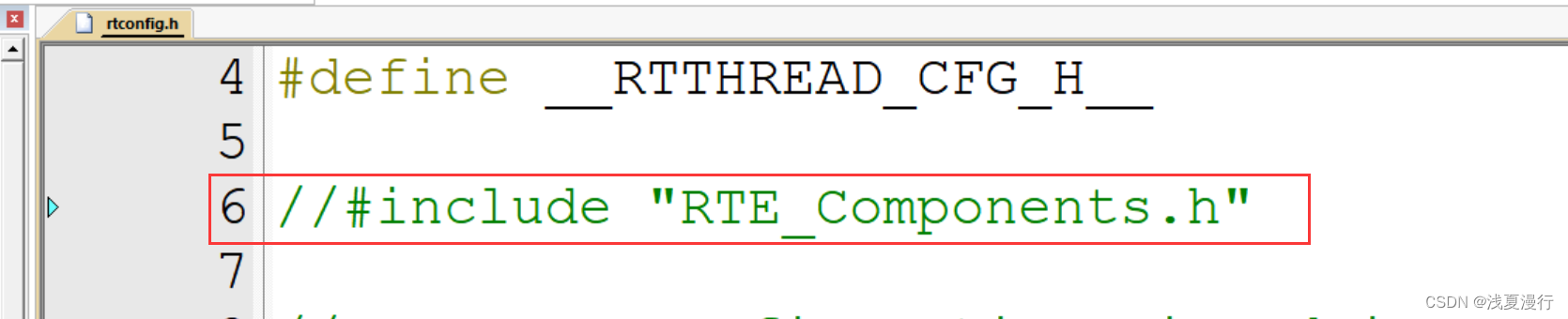
编译代码,编译完成之后,修改错误:
..\User\rtconfig.h(6): error: #5: cannot open source input file "RTE_Components.h":
No such file or directory

注释掉此头文件(如果不能修改,查看文件属性,进行修改)
重复定义:
.\Objects\BH-F103.axf: Error:
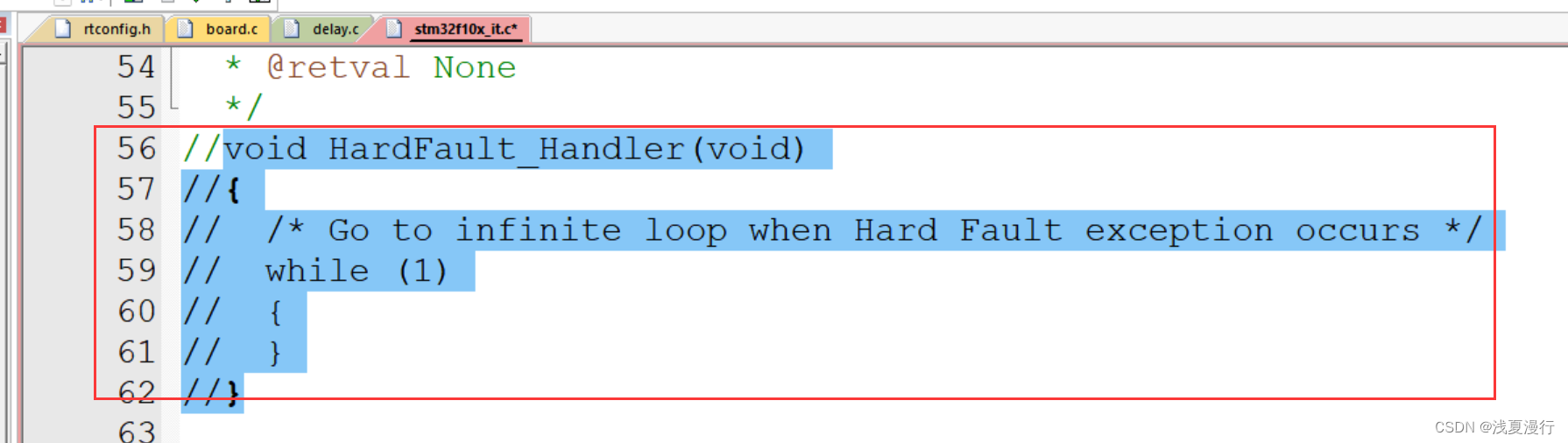
L6200E: Symbol HardFault_Handler multiply defined (by context_rvds.o and
stm32f10x_it.o).
.\Objects\BH-F103.axf: Error:
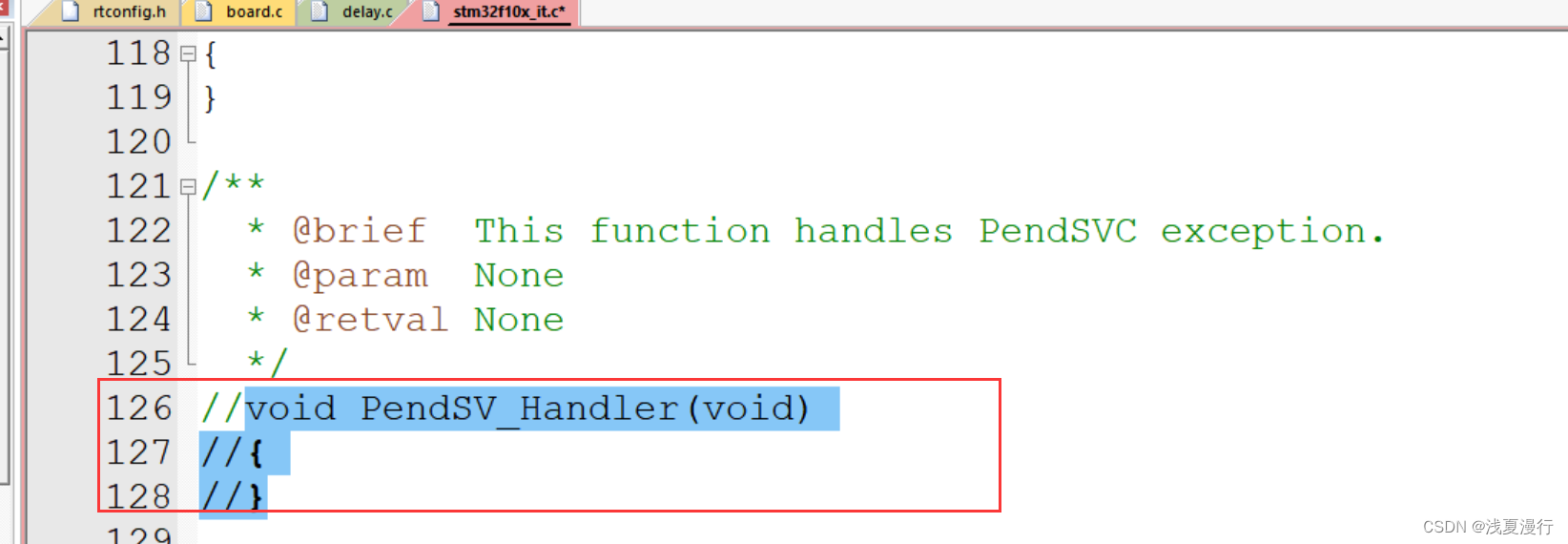
L6200E: Symbol PendSV_Handler multiply defined (by context_rvds.o and stm32f10x_it.o).
.\Objects\BH-F103.axf: Error:
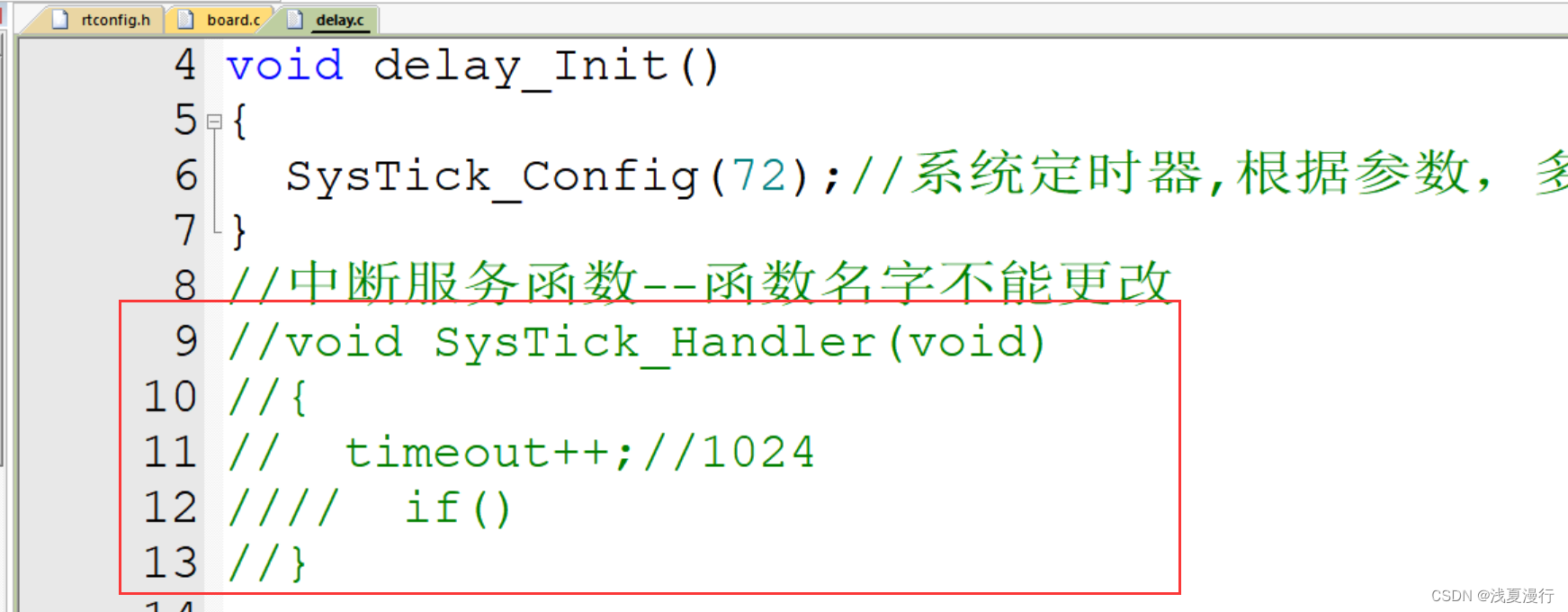
L6200E: Symbol SysTick_Handler multiply defined (by board.o and delay.o).
SysTick_Handler:
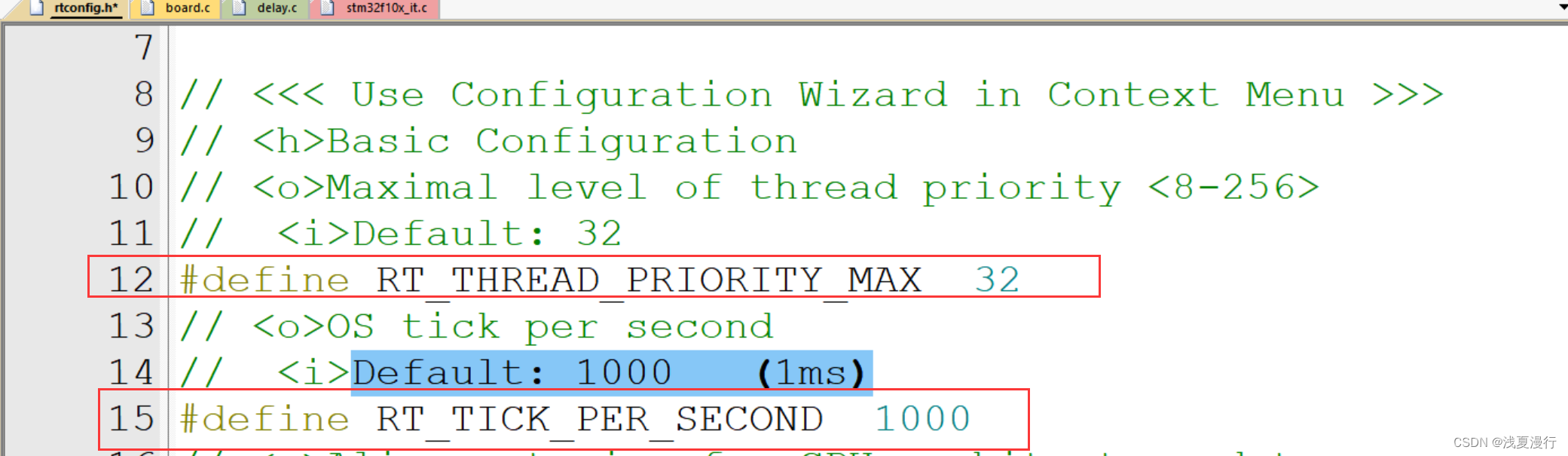
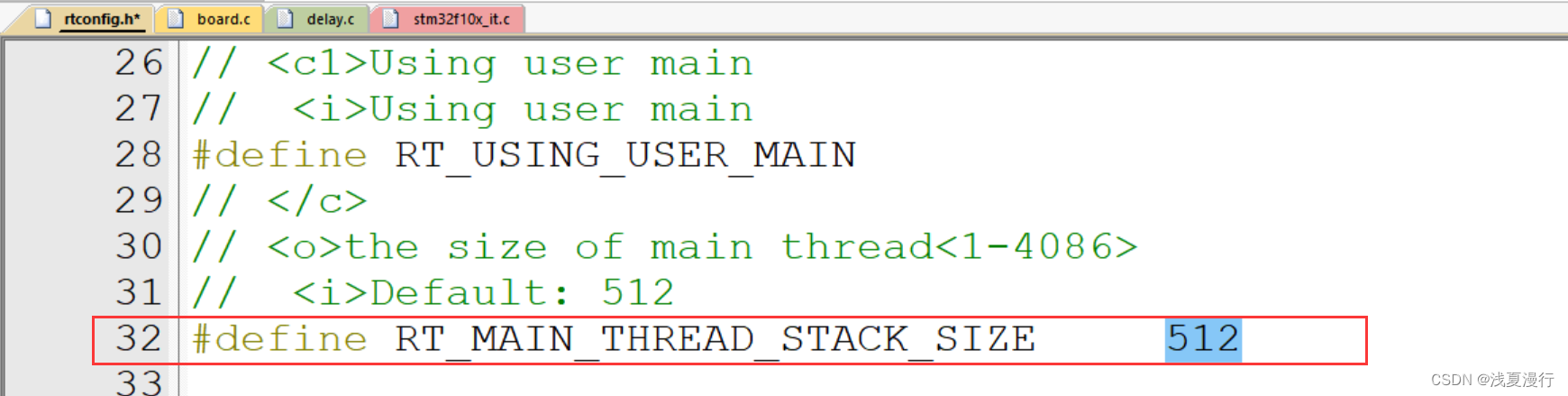
rtconfig.h文件的修改:
修改优先级和系统定时器
修改栈区空间:
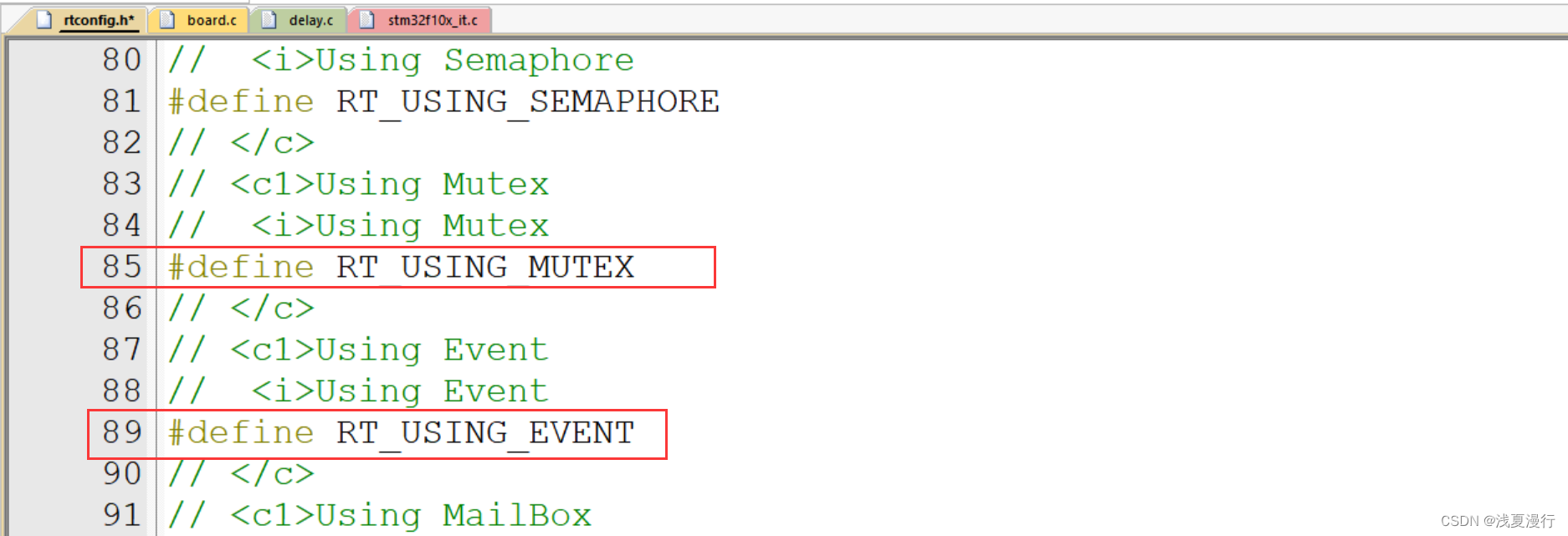
打开信号量和事件、互斥
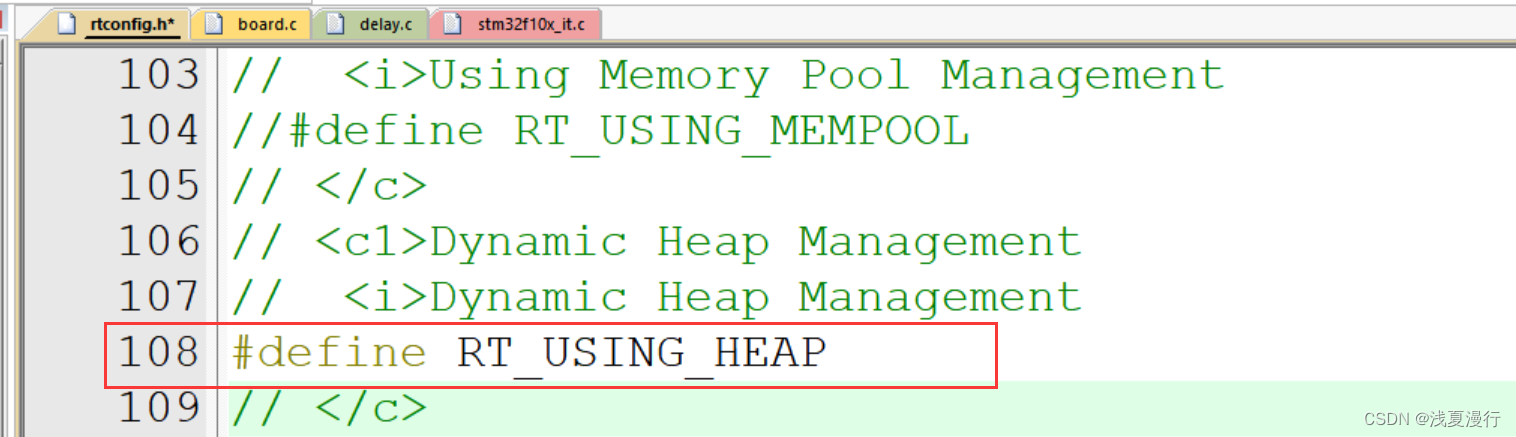
使能堆区:
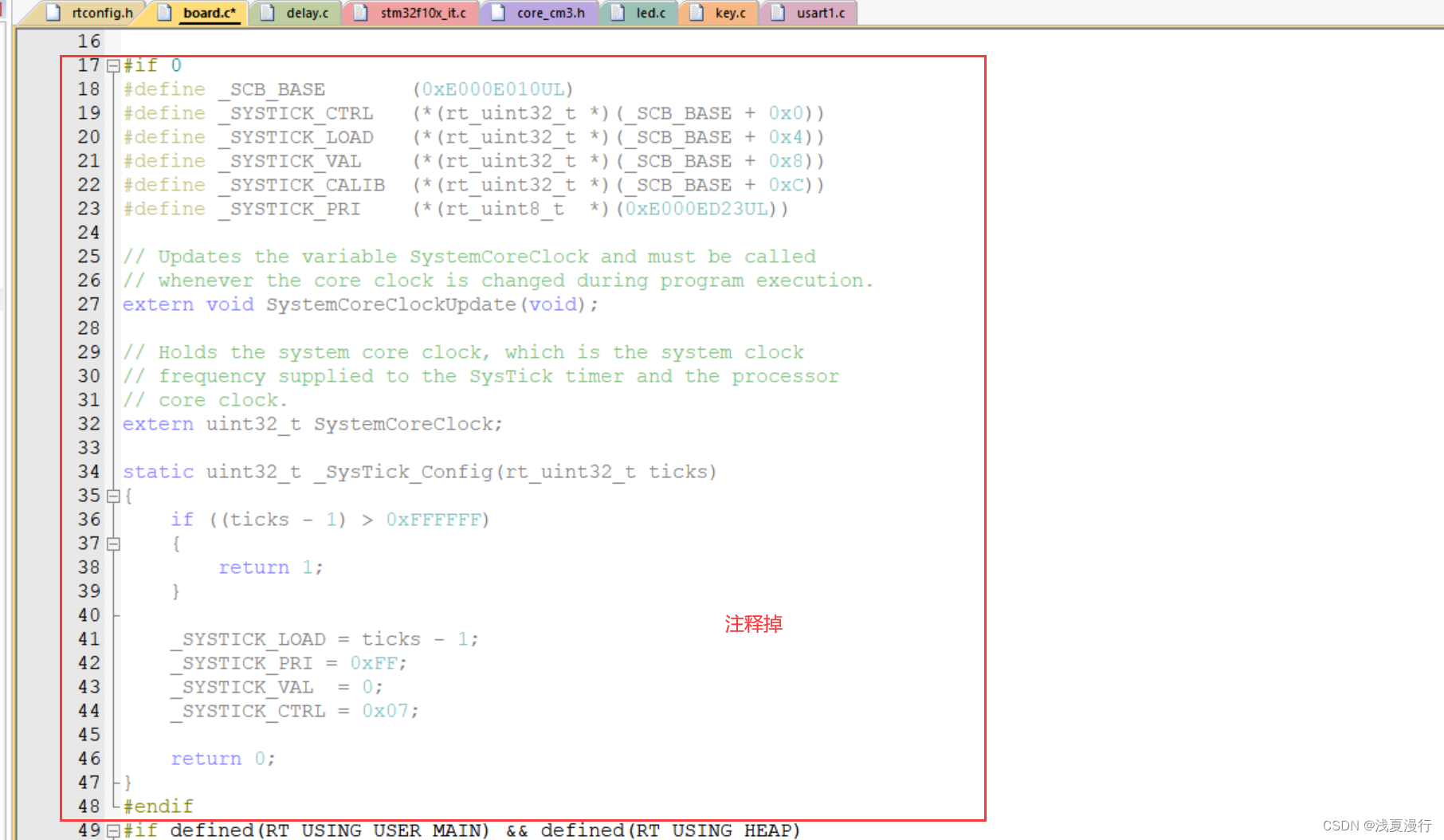
修改board.c文件
此文件中操作系统和底层硬件的链接部分,比如系统定时器
需要先将board.c文件添加到rtt_src分组
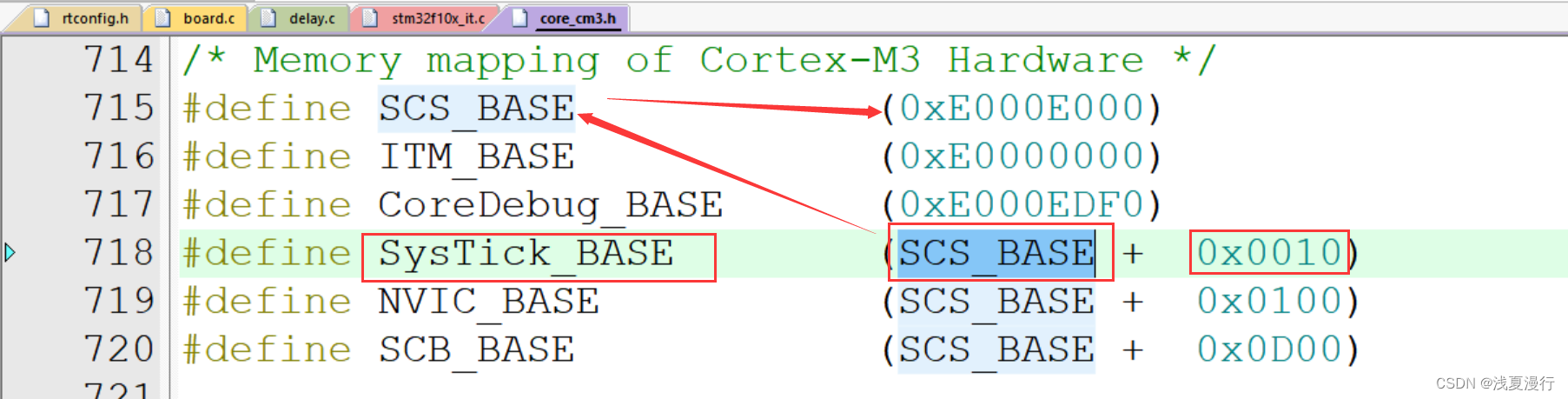
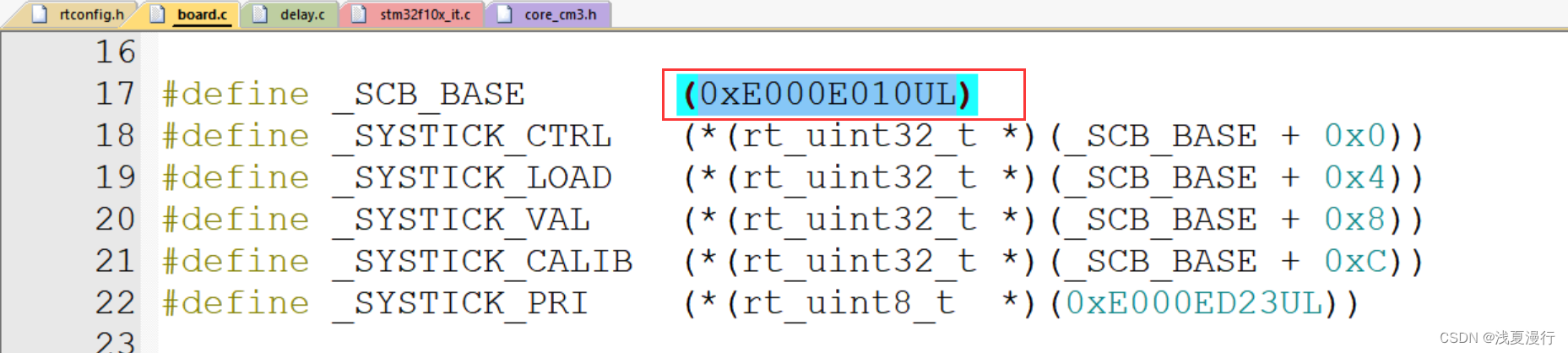
首先我们先来看内核中的系统定时器地址:
core_cm3.h
SysTick_BASE 地址–0xe000e010
再看OS中的,定时器地址:
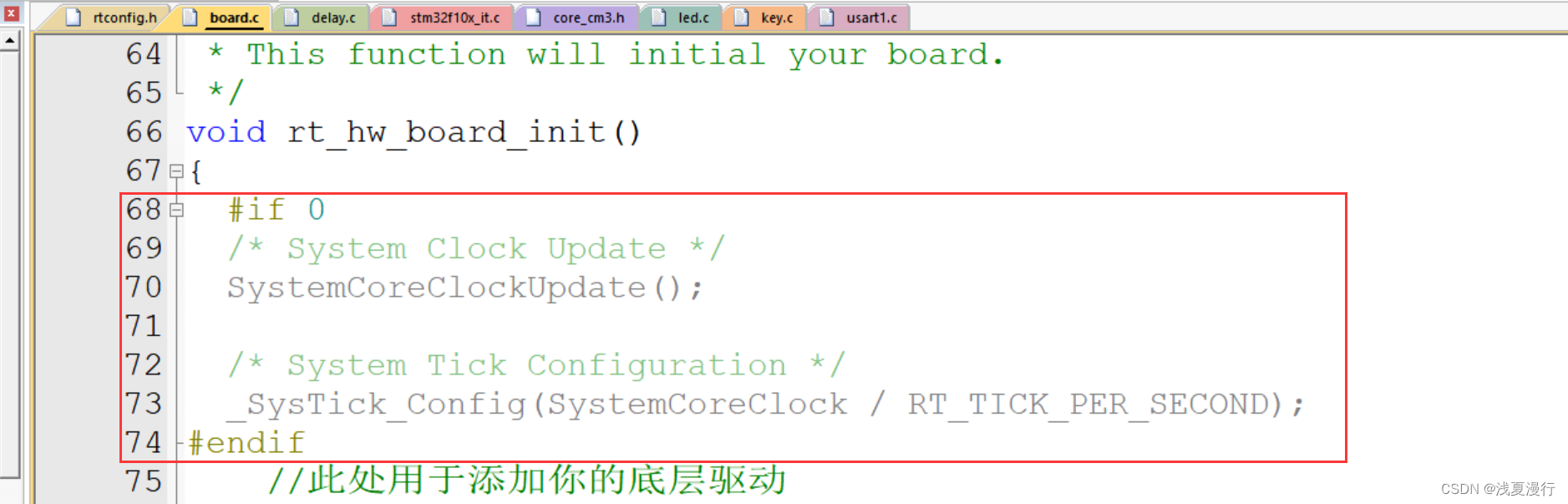
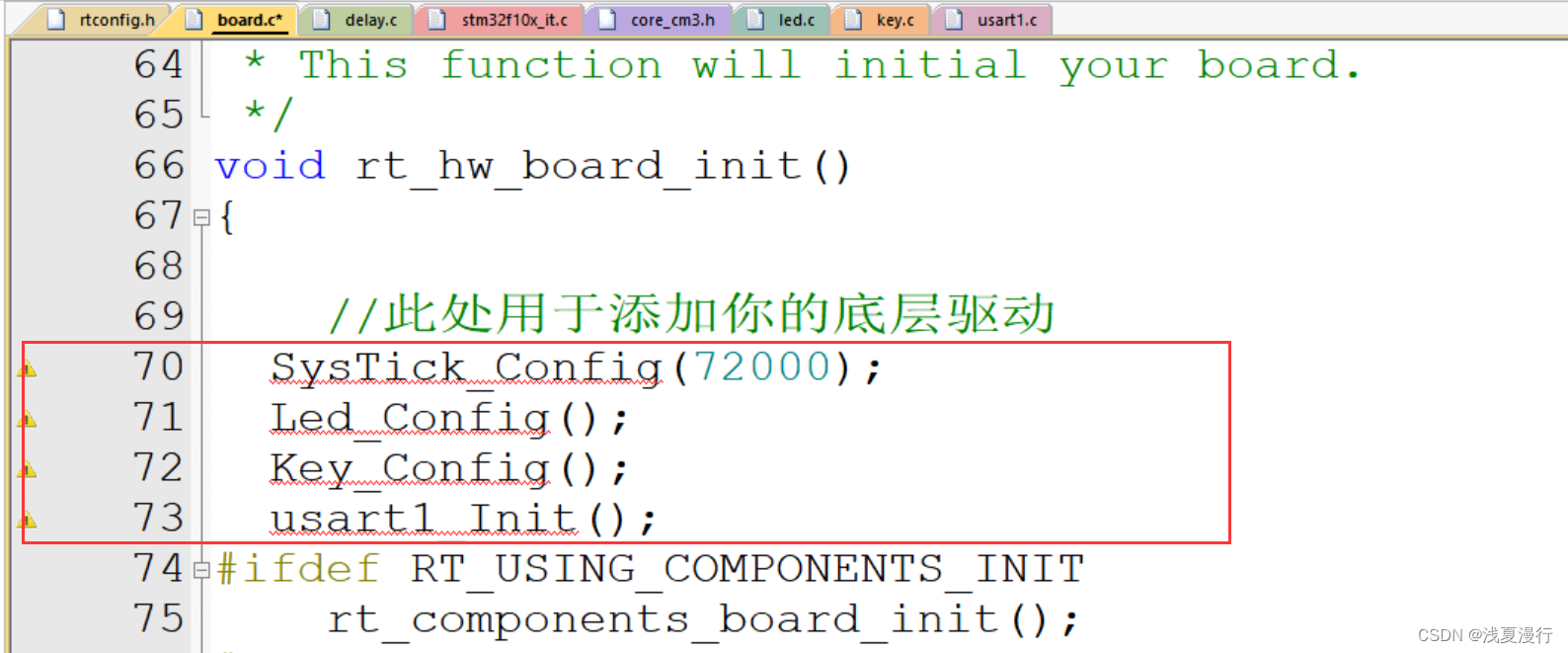
void rt_hw_board_init()
包含了我们底层设备的驱动信息
修改:注释掉或者删除
添加初始化内容:
添加一个board.h
路径和Board.c一样
编译代码,查看有没有错误:

验证工程可用性
#include <rtthread.h>
#include <rthw.h>
#include "board.h"
void LED1_Pthread(void *para);
rt_thread_t led1_thread;
int main(void)
{
//创建线程--LED
led1_thread=rt_thread_create("led1",LED1_Pthread,NULL,128,5,20);
if(led1_thread !=RT_NULL)
{
rt_thread_startup(led1_thread);
}
while(1)
{
}
return 0;
}
void LED1_Pthread(void *para)
{
while(1)
{
LED1ON();
rt_thread_delay(500);
rt_kprintf("led1 running!!\r\n");//将打印信息输出到我们的串口助手中
LED1OFF();
rt_thread_delay(500);
}
}
finsh组件:
FinSH 是 RT-Thread 的命令行组件,提供一套供用户在命令行调用的操作接口,主要用于调试或查看系统信息。它可以使用串口 / 以太网 / USB 等与 PC 机进行通信。
用户在控制终端输入命令,控制终端通过串口、USB、网络等方式将命令传给设备里的 FinSH,FinSH 会读取设备输入命令,解析并自动扫描内部函数表,寻找对应函数名,执行函数后输出回应,回应通过原路返回,将结果显示在控制终端上。
使用以下函数的前提,必须配置好串口1的驱动:
rt_kprintf–修改此函数的打印方向:
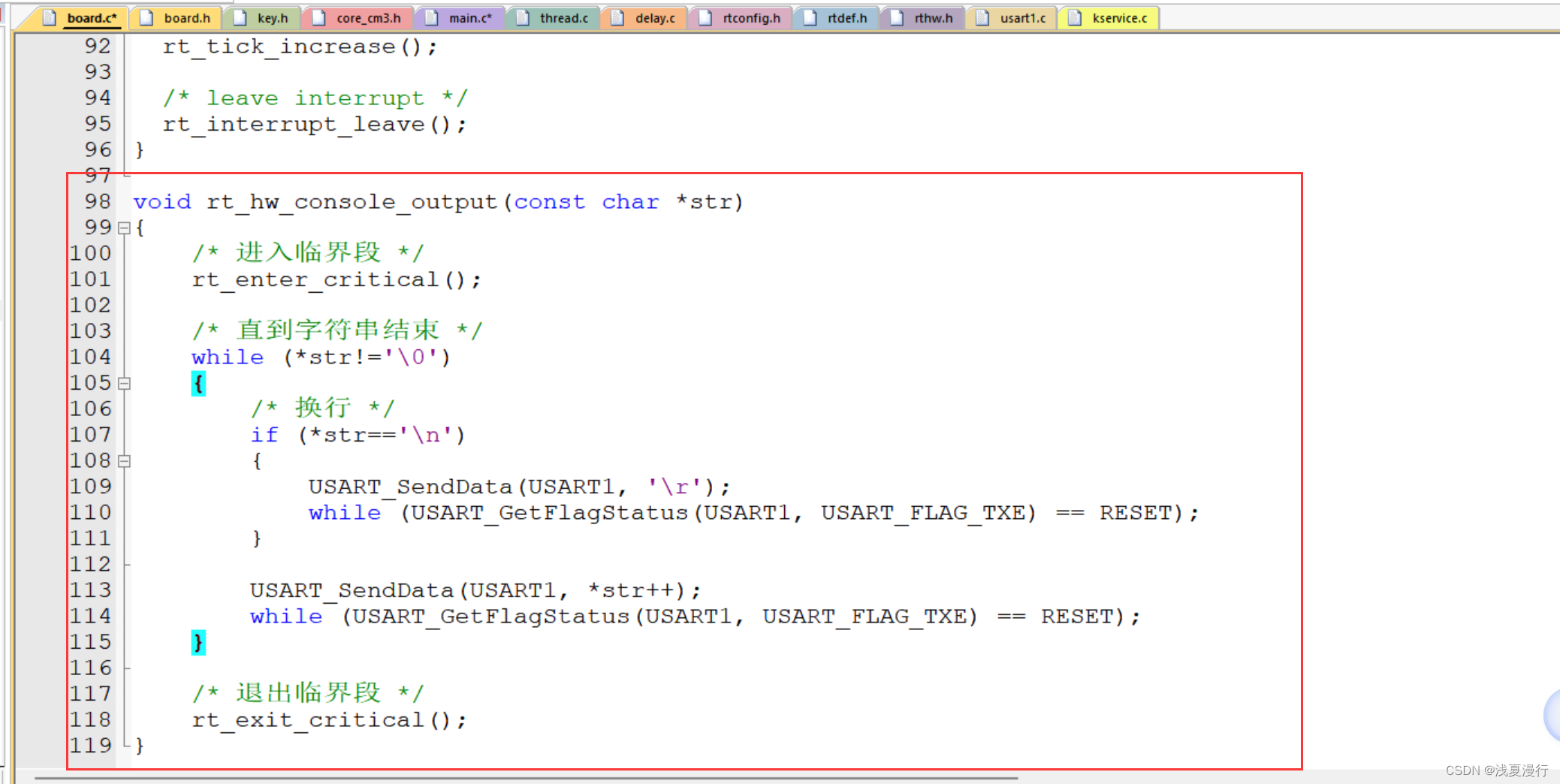
void rt_hw_console_output(const char *str)
{
/* 进入临界段 */
rt_enter_critical();
/* 直到字符串结束 */
while (*str!='\0')
{
/* 换行 */
if (*str=='\n')
{
USART_SendData(USART1, '\r');
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
USART_SendData(USART1, *str++);
while (USART_GetFlagStatus(USART1, USART_FLAG_TXE) == RESET);
}
/* 退出临界段 */
rt_exit_critical();
}















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









