







一、目标
学习如何旋转图片。
二、函数说明
在OpenCV中,没有现成的函数直接用来实现图像旋转,它是用仿射变换函数warpAffine来实现的,此函数目前支持4种插值算法,最近邻、双线性、双三次、兰索斯插值。
函数原型:
void warpAffine(InputArray src, OutputArray dst, InputArray M, Size dsize, int flags=INTER_LINEAR, int borderMode=BORDER_CONSTANT, const Scalar& borderValue=Scalar())src源图像;
dst目标图像;
M转换矩阵;
dsize转换后图像的大小;
flags插值算法类型;
borderMode,borderValue默认0;
三、程序代码
#include "cv.h" // OpenCV 文件头
#include "highgui.h"
#include "cvaux.h"
#include "cxcore.h"
#include "opencv2/opencv.hpp"
#include "opencv2/imgproc.hpp"
#include <iostream>
#include <string>
using namespace cv;
using namespace std;
Mat rotateImage1(Mat img, int degree)
{
degree = -degree;//warpAffine默认的旋转方向是逆时针,所以加负号表示转化为顺时针
double angle = degree * CV_PI / 180.; // 弧度
double a = sin(angle), b = cos(angle);
int width = img.cols;
int height = img.rows;
int width_rotate = int(height * fabs(a) + width * fabs(b));
int height_rotate = int(width * fabs(a) + height * fabs(b));
//旋转数组map
// [ m0 m1 m2 ] ===> [ A11 A12 b1 ]
// [ m3 m4 m5 ] ===> [ A21 A22 b2 ]
float map[6];
Mat map_matrix = Mat(2, 3, CV_32F, map);
// 旋转中心
CvPoint2D32f center = cvPoint2D32f(width / 2, height / 2);
CvMat map_matrix2 = map_matrix;
cv2DRotationMatrix(center, degree, 1.0, &map_matrix2);//计算二维旋转的仿射变换矩阵
map[2] += (width_rotate - width) / 2;
map[5] += (height_rotate - height) / 2;
Mat img_rotate;
//对图像做仿射变换
//CV_WARP_FILL_OUTLIERS - 填充所有输出图像的象素。
//如果部分象素落在输入图像的边界外,那么它们的值设定为 fillval.
//CV_WARP_INVERSE_MAP - 指定 map_matrix 是输出图像到输入图像的反变换,
warpAffine(img, img_rotate, map_matrix, Size(width_rotate, height_rotate), 1, 0, 0);
return img_rotate;
}
int main(int argc, char *argv[])
{
int degree;
Mat m_SrcImg;
m_SrcImg = imread("C:\\Users\\lidabao\\Desktop\\Lena1.bmp");
namedWindow("原图像", 1);
imshow("原图像", m_SrcImg);
cout << "请输入旋转的度数:";
cin >> degree;
Mat m_ResImg = rotateImage1(m_SrcImg, degree);
namedWindow("旋转后图像", 1);
imshow("旋转后图像", m_ResImg);
waitKey(0);
}四、解释
1、cv2DRotationMatrix
计算二维旋转的仿射变换矩阵
CvMat* cv2DRotationMatrix( CvPoint2D32f center, double angle,double scale, CvMat* map_matrix );center:输入图像的旋转中心坐标
angle:旋转角度(度)。正值表示逆时针旋转(坐标原点假设在左上角).
scale:各项同性的尺度因子
map_matrix:输出 2×3 矩阵的指针
函数 cv2DRotationMatrix 计算矩阵:
[ α β | (1-α)*center.x - β*center.y ]
[ -β α | β*center.x + (1-α)*center.y ]
where α=scale*cos(angle), β=scale*sin(angle)
该变换并不改变原始旋转中心点的坐标,如果这不是操作目的,则可以通过调整平移量改变其坐标(译者注:通过简单的推导可知,仿射变换的实现是首先将旋转中心置为坐标原点,再进行旋转和尺度变换,最后重新将坐标原点设定为输入图像的左上角,这里的平移量是center.x, center.y)。
2、degree = -degree
warpAffine默认的旋转方向是逆时针,所以加负号表示转化为顺时针
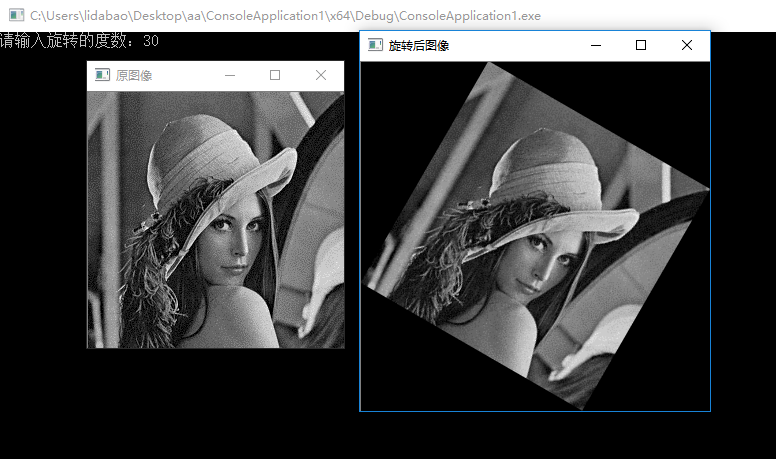
五、结果
程序运行如下图:
旋转角度设为30度。
六、注意
正确的配置opencv
正确使用warpAffine()函数

















 670
670

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









