










源码下载地址
项目介绍
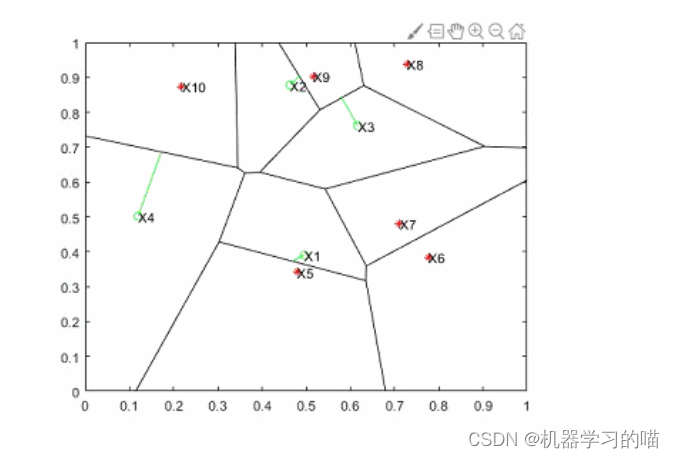
本仓库是对论文《Intercepting Rogue Robots: An Algorithm for Capturing Multiple Evaders With Multiple Pursuers》的复现,基于voronoi图最小化围捕算法
项目功能
循环控制
- 判断所有的evader是否被抓住
- 获取各个agent的位置
- 计算场上或者的agent维诺图
将active的agent的index选出来
把这些agent的pos放到一个数组中
计算voronoi图
要计算维诺图的无穷远边与凸多边形的交点,因为有无穷大,无法计算pursuer的的速度
所以必须设置边界,所有点在这个边界内运动,否则会出现计算nan,无法计算
需要对每个元胞构成的voronoi图的顶点重新分配,把无穷远的点替换成直线的交点
预处理:遍历所有的元胞,把元胞C在正方形外的顶点和无穷远的顶点ID都删除掉,只保留在正方形内的顶点
如果顶点在正方形上怎么办,作为有界区域处理,不管他
从vx,vy中倒序查找点,第二行最后一列是终点,第一行最后一列是起点,检测这样的线段是否与正方形的线段有交点
函数中已经把重复的点去掉了
有就把交点按顺序储存到V中(避免与之前的交点的ID产生冲突),接着把正方形的顶点也储存进去,打上ID,没有就过
需要检测是否有重复的点!
所有的边都检查完,为V中新添加的点找最近的两个元胞(用小于等于),并且为元胞打上ID
有点到三个元胞的距离相同,但是计算法先,这个点是元胞内部的点,记得在i上+1即可
正方形角点计算选择最近的距离
其他距离选择两个元胞
4. 计算pursuer和evader速度方向
寻找pursuer元胞周围的neightbor是否有evader的元胞,如果有,找到最近的evader元胞,计算边界的型心;如果没有则计算最近的evader,速度方向朝向evader。
找到两个元胞公共的顶点,且公共顶点数为2,则这两个元胞相邻
先找元胞的neightbor,然后在neightbor中找evader,在evader中找最近的evader
寻找evader 元胞周围的neightbor是否有pursuer的元胞,如果有,计算evader的多边形的型心,朝着型心运动;如果没有则计算最近的pursuer,速度方向朝向pursuer的反方向。
根据论文公式计算输入u
- 运动到指定点的位置
- 计算是否触发捕获
计算每个evader最近的pursuer距离,如果小于rc就设置被捕获状态,停止运动,pursuer更新target
全部evader都被捕获,停止运动
MATLAB图像处理 - 如何给图填充颜色
不处理 - 如何取消voronoi图的蓝点
hold off - 如何更新各个点的位置,同时上一时刻的位置消失
hold off
界面预览
项目备注
1、该资源内项目代码都经过测试运行成功,功能ok的情况下才上传的,请放心下载使用!
2、本项目适合计算机相关专业(如计科、人工智能、通信工程、自动化、电子信息等)的在校学生、老师或者企业员工下载学习,也适合小白学习进阶,当然也可作为毕设项目、课程设计、作业、项目初期立项演示等。
3、如果基础还行,也可在此代码基础上进行修改,以实现其他功能,也可用于毕设、课设、作业等。
下载后请首先打开README.md文件(如有),仅供学习参考, 切勿用于商业用途。
















 1179
1179

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











