






如何将车辆坐标系转换道路坐标系
附赠自动驾驶最全的学习资料和量产经验:链接
自动驾驶汽车路径规划技术的难点之一在于规划过程中难以表达车辆与道路之间的相对位置,导致二者之间的相对关系不明确。因此,传统规划算法在笛卡尔坐标系下规划出的路径对于开放道路有良好的效果,但是对于公路环境,忽略车道信息导致路径的自由度太高而容易违反道路交通规则。在DAPRA汽车挑战赛期间,由斯坦福大学提出的路径规划算法将横向偏移(lateral offset)定义为相对于基础路径(baseframe)的垂直距离。由于基础路径为道路中心线,这样的定义方式使得道路与车辆之间的关系更为直观。
在Frenet坐标系下,可以将自动驾驶车辆时时位置状态分解为s和d两个方向进行描述,从而在轨迹规划时,减少对车辆坐标信息的处理。
如图1所时,在全局坐标系下,任意时刻t的车辆运动状态可以描述为:



在 Frenet 坐标系下, 车辆的运动状态可以描述为:


其中: s 为纵向位移,为纵向速度, s̈ 为纵向加速度, d 为横向位移, 为横向速度, 为横向加速度, 为横向位移对弧长的一阶导数, 为横向位移对弧长的二阶导数。
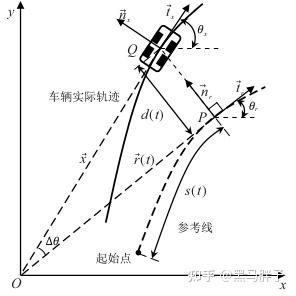

图1 Frenet 坐标系与全局笛卡尔坐标系的转换
本文介绍在adas无地图全局信息时,将自车坐标系转换到基于车道线的Frenet坐标系进行横纵向规划。
Cartesian转Frenet坐标系
在Cartesian坐标系下,已知车辆信息为:

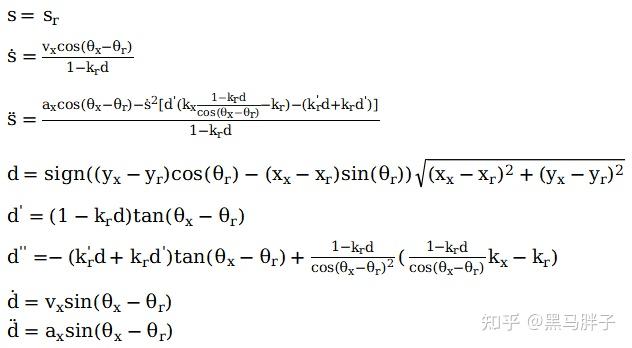
需要求解出:


则:

Frenet转Cartesian坐标系
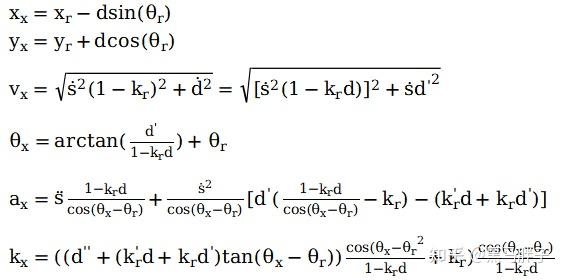

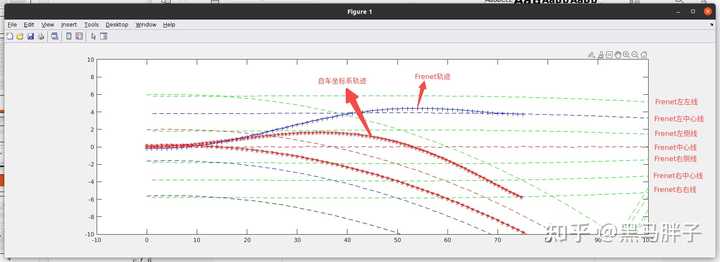
车辆坐标系与Frenet坐标系互转效果如下:
将车辆坐标系下弯曲车道线转换为Frenet坐标系下状态后变为直线形式,将Frenet坐标系下轨迹点左边转为车辆坐标系下轨迹点后也符合预期。
由于adas中无全局坐标,此时


需要进行基于参考线进行求解后使用。
















 1364
1364











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









